Изобретениеотносится к преобразовательной технрже и может найтн примеиеипе,.в частности, в автономных электроэнергетических систейах постоянного тока.
Известны устройства аналогичного назначения, используемые для ре1улирования или стабилизации выход иого напряжения методом тиротно-импульсной модуляции L3 23.
Эти регуляторы содержат два канала - задающий (или ведущий) и ведомый, а формирование широтно-модулироватюго сигнала и, следовательно, регулирование вьгходного напряжен 1я осуществляется фазосдвигающим устройством, что неизбежно приводит к появлению статической ошибки в системе регулирования.
Известны также астатические преобразовател с ШИМ, у которых частота коммутащ и выходного напряжения равна удвоенной частоте задающего генератора, однако это не приводит к существенному улучшению динамических показателей качества при прежнем уровне пульсаций в выходном напряжении, а при установке двухзвенного фильтра, второе звено которого находится вне контура обратной связи, теряются достоинства систеN bi как астатической.
Наиболее близким по своей технической сущности к изобретению является полупроводниковый преобразователь постоянного напряжения с астатическим регулированием напряжения, содержащий ведущий и ведомый каналы, причем, ведущий (задающий) генера тор питается стабилизированным напряже-нием, а ведомый генератор выходным напряжением преобразователя З. Прицип работы устройства исключает появлеьше статистической ошибки, а стабильность его выходного напряжения определяется стабильностью напряже ния питающего задающий генератор ведущего канала.
Однако это устройство имеет ряд существенных недостатков.
Во-первых, частота пульсаций на , выходе преобразователя равна частоте задающего генератора, вследствие чегоамплитуда пульсаций напряжения на выходе даже при условии установки фильтра делают его. непригодным для питания ряда потребителей; вовторых, увеличение постоянной времени фильтра с целью обеспечения допустимого уровня пульсаций выходного напряжения приводит к резкому снижению динамических показателей качества (перерегулированию, колебательности и т.д.) преобразователя, как системы регулирования, и даже к потере устойчивости; в третьих, ограниченный диапазон регулирования выходного напряжения, в четвертых регуляторы с ШИМ являются существенно-нелинейными, поэтому при расширении диапазона регулирования вы- . ходного напряжения динамические показатели качества также сильно отличаются.
Цель изобретения - улучшение динамических показателей качества при обеспечении заданного уровня пулсаций на выходе регулятора во всем диапазоне напряжений.Достигается это тем, что в астатический регулятор-стабилизатор постоянного напряжения, содержащий задающий и ведомый генераторы, выходы которых присоединены к входам соответствующих усилителей мощности, а выходы усилителей мощности объединены и подключены к входу выходного фильтраJдополнительно введены два сумматора, масштабирующий усилитель постоянного тока, функциональньй преобразователь и звено с регулируемьм коэффициентом усиления, причем выход регулятора соединен с входами масштабирующего усилителя постоянного тока и функционального преобразователя, выход масштабирующего усилителя постоянного тока соединен с инверсным входом первого сумматора, выход первого сумматора соединен с входом звена с регулируемым коэффициентом усиления, а его выход с прямым входом второго сумматора, второй прямой вход которого соединен с источником опорного напряжения н с управляющим вхо,дом задающего генератора, выход втоiporo сумматора соединен с управляюп(им входом ведомого генератора, второй вход функционального преобразователя соединен с соответствующей клеммой первичного источника питания, а выход функционального преобразователя соединен с управляющим входом звена с регулирующим коэффициентом усиления.
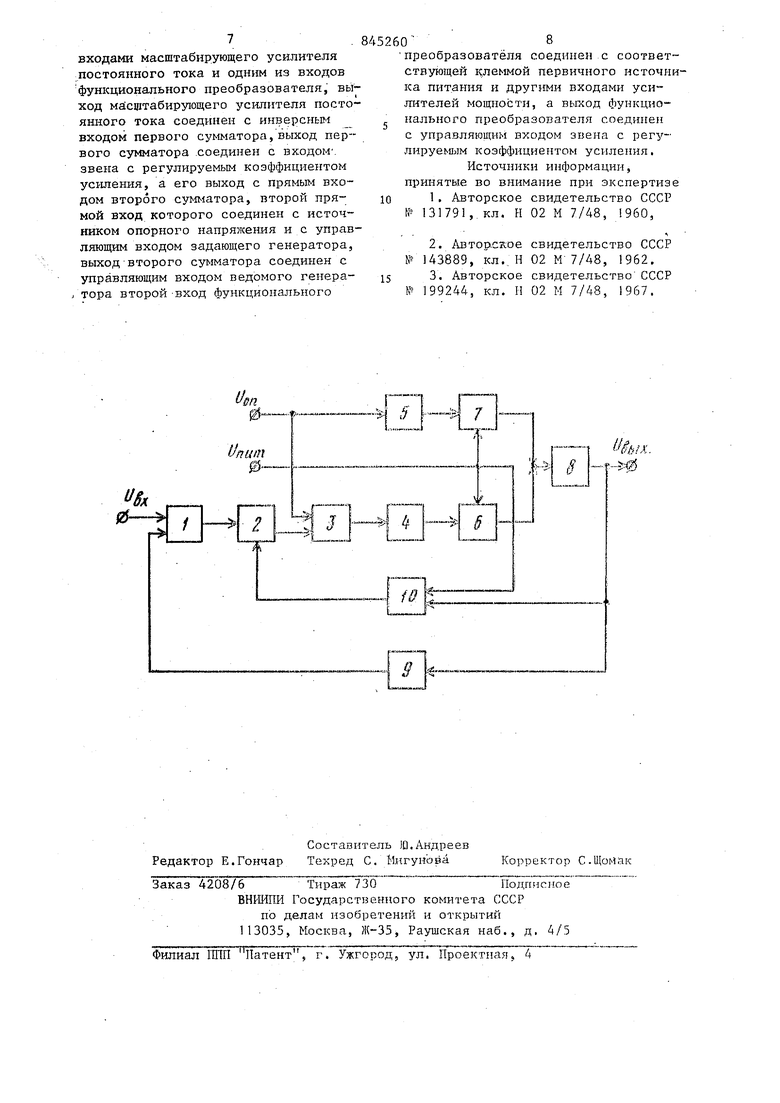
На чертеже представлена блок-схема данного устройства.
Астатический регулятор-стабилизатор постоянного напряжения состоит из первого сумматора 1, на прямой
вход которого подается управляющее воздействие, а его выход соединен с йходом звена с регулируемым коэффициентом -усиления 2, вход которого соединен с прямым входом второго сумматора 3. Выход сумматора 3 соединенс управляющим входом ведомого генератора 4, а его второй прямой вход соединен с источником опорного напряжения и с управляющим входом- задающего генератора 5. Выход генератора 4 соединен с входом усилителямощности 6, а выход генератора 5 - с входом усилителя г.ощности 7. Выходы усилителей мощности объединены и
подключены к входу выходного фильтра 8. Выход регулятора соединен с входом масштабирующего усилителя постоянного тока 9 и одним из входов функционального преобразователя 10.
Выход масштабирующего усилителя постоянного тока 9 соединен с инверсным входом сумматора 1. Второй вход функционального преобразователя 10 соединен с соответствующей клеммой
первичного источника питания и другими входами усилителей 6 и 7, а его выход - с управляющим входом звена с регулируемым коэффициентом усиления 2.
Работает устройство следующим образом.
В установившемся режиме в астатическом регуляторе сигнал ошибки на вькоде первого сумматора 1, а также звена с регулируемым коэффициентом усиления 2 равен нулю. При этом напряжение на выходе второго сумматора 3, питающее ведомый генератор 4, равно опорному напряжению Ц
он
питающему задающий генератор 5. При вьшолнении этик генераторов идентичными их равны, а фазовый сдвиг будет постоянным. Суммарное напряжение па выходе усилителей мощности 6 и 7 им.еет ступенчатую форму, а де ствующая величина его определяется сдвигом по фазе между генераторами 4 и 5. Это пульсирующее напряжение сгла живае1тся фильтром 8 до требуемой ве личины, причем произведение выходно го напряжения- на коэффициент усиления масштабирующего усилителя постоя ного тока 8 по абсолютной величине равно противоположному по знаку вх ному напряжению регулятора . В переходном .режиме (при управля ющем воздействии, либо при возмущении со стороны нагрузки) на вь1ходе первого сумматора I появляется сигнал ошибки и через звено с регулиру емым коэффициентом усиления 2 складывается во втором сумматоре 3 с опорным напряжением 1. При этом частота ведомого генератора 4 стане отличной от частоты задающего генератора 5, так как мулЁтивибраТор с индуктивной связью по своей сущности является преобразователем напря жение - частота. При этом для задающего генератора 5 и кы, on 5 ДЛЯ ведомого генератора U , следовательно, где Ugr,- напряжение опорного, источника;та приращение напряжения генератора ведомого канала за счет сигнала ошибки; коэффициент пропорциональности, определяемый параметрами трансформаторов; /,,1 частоты первой гармоники соответствующих генераторов . Изменение частоты ведомого генератора приводит к накоплению во вре мени фазового сдвига Ф между генераторами по зависимости о Таким образом, величина выходного напряжения регулятора, зависящая от схемного решения усилителей мощности 6 и 7, определяется сдвигом по фазе , а скорость измене0«ния выходного напряжения разностной частотой генераторов 4 и 5ЛСх) . Введением в обратную связь масштабирующего усилителя постоянного тока 9 с коэс})фициентом К 1 костигается моКд, т.е .коэффициент усиления разомкнутой системы при приведении ее к единичной обратной связи уменьшается в ,раз. соответственно возрастают и запасы устойчивости, однако астатизм систем сохраняется, ,(KQj.Uii)dt, а ошибка из-за дрейфа усилителя постоянного тока при коэффициенте 1 пренебрежимо мала. С целью улучшения динамических показателей качества во всем диапазоне регулирования выходного напряжения в устройство введены функциональный преобразователь 10 и звено с ре-, гулируемым коэффициентом усиления. 2. Так как нелинейность определяется параметрами схемы усилителей мощности и внешней характеристикой первичного источника питания, то она заранее может быть достаточно точно рассчитана. Функциональный пре- , образователь 10 реализует компенсирующую нелинейность, причем, входными его величинами являются выходное напряжение и напряжение первичного источника питания, а выход функционального преобразователя ГОсоединен с управляющим входом звена с регулируемым коэффициентом усиления 2. Формула изобретения Астатический регулятор-стабилизатор постоянного напряжения, содержащий задающий и ведомый генераторы, выходы каждого из которых присоединены к одному из входов соответствующих усилителей мощности, а выходы усилителей мощности объединены и подключены к входу выходного фильтра, отличающийся тем, что, с целью улучшения динамических показателей качества при обеспечении заданного уровня пульсаций на выходе регулятора во всем диапазоне напряжений, дополнительно введены два сумматора, масштабирующий усилитель постоянного тока, функциональный преобразователь и звено с регулируемым коэффициентом усиления, прием, выход регулятора соединен с
входами масштабирующего усилителя постоянного тока и одним из входов функционального нреобразователя, выод мйсщтабирующего усилителя постоянного тока соединен с инверсным входом первого сумматора, выход первого сумматора .соединен с вкодом. звена с регулируемым коэффициентом усиления, а его выход с прямым входом второго сумматора, второй прямой вход которого соединен с источником опорного напрялсения и с управляющим входом задающего генератора, выходВторого сумматора соединен с управляющим входом ведомого генератора второй-вход функционального
452608
Преобразователя соединен с соответ ствующей клеммой первичного источника питания и другимз{ входами усилителей мощности, а вьгход функцио- нального преобразователя соединен с управляющим входом эвена с регулируемым коэффициентом усиления,
Источники информации, принятые во внимание при экспертизе 10 1. Авторское свидетельство СССР № 131791,.кл. Н 02 М 7/48, I960,
«1
2. Авторское свидетельство СССР № 143889, кл.. Н 02 М 7/А8, 1962. 15 3. Авторское свидетельствоСССР № 199244, кл. Н 02 М 7/48, 1967.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1986 |
|
SU1372580A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1791952A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТОКОВ ЯКОРЯ И ВОЗБУЖДЕНИЯ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1995 |
|
RU2088432C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2636806C2 |
