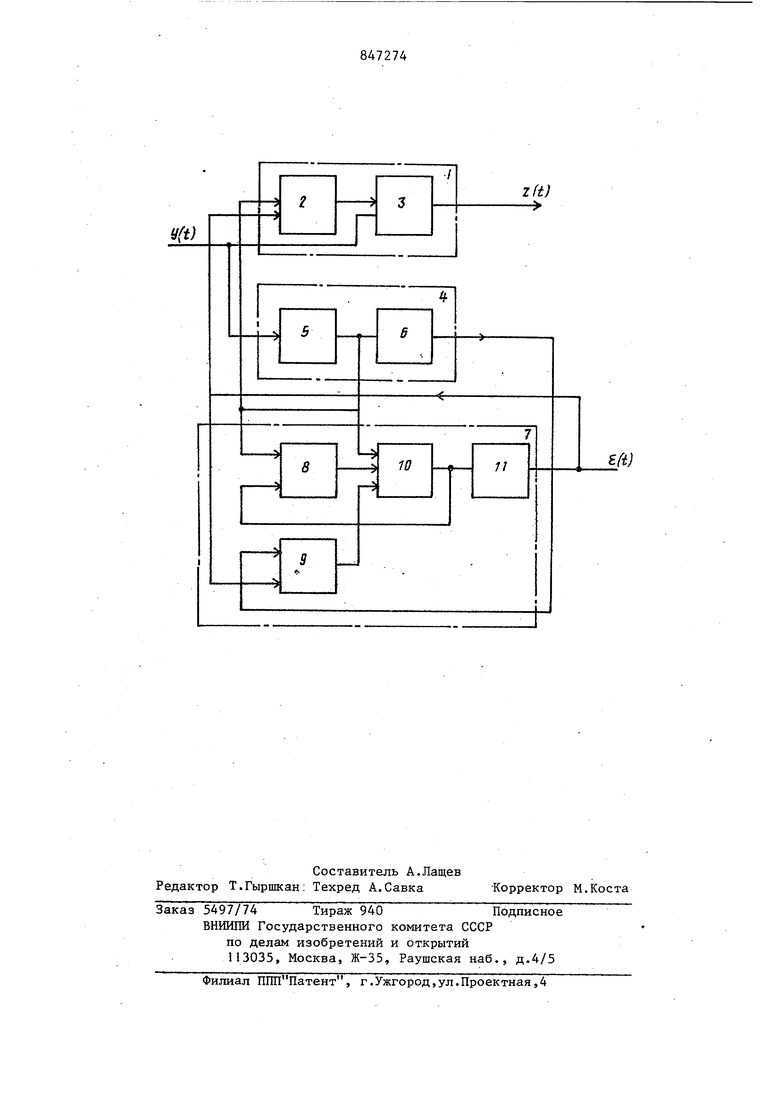
Изобретение относится к адаптивным системам управления, измерительной информационной технике и технической кибернетике и может найти применение для измерения нестационарных температур, концентрации водородных и др. ионов, относительной влажности и др. Наиболее близким по технической сущности к предлагаемому является адаптивное корректирующее устройство содержащее первый дифференциатор и последовательно соединенные первый блок умножения и первый сумматор, второй вход которого соединен со входом первого дифференциатора СО Недостатком этого устройства является низкая точность. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем что устройство содержит второй дифференциатор и последовательно соединенные второй блок умножения, второй сумматор, интегратор и третий блок умножения, выход первого дифференциатора соединен со вторым входом второго сумматора, первыми входами первого и второго блоков умножения, . а через последовательно соединенные первый дифференциатор, третий блок умножения и второй сумматор - со вторым входом второго блока умножения, выход интегратора соединен со вторым вхбдом первого блока умножения. На чертеже представлена структурная схема адаптивного корректируйщего устройства. Устройство содержит корректирующее устройство 1, первый блок 2 умножения, первый сумматор 3, блок 4 формирования производных, первый и второй дифференциаторы 5 и 6, блок 7 формирования динамического коэффициента, второй и третий блоки 8,9 умножения, второй сумматор 10, -интегратор 11. Корректирующее устройство 1 предназначено для улучшения динамической характеристики корректируемого преоб3разователя, содержащего первый блок 2 умножения и первый сумматор 3. Вых первого блока 2 умножения подключен к первому входу первого сумматора 3, входы первого блока 2 умножения под ключены к выходам первого дифференциатора 5 блока 1 формирования динамического коэффициента, а второй вход первого сумматора 3 подключен к выходу корректируемого преобразователя. Корректирующее устройство 1 при помощи первого блока 2 умножения и первого сумматора 3 формирует сигнал z(t) (t)y(t)+y(t), где z(t) - выходной сигнал корректирующего устройства 1, (t) - выходной сигнал блока формирования динамического коэффициента; y(t) - выходной сигнал коооектисуемого .преобразователя; y(t)- - выходной сигнал первого дифференциатора 5,6U)y(t) - выходной сигнал первого блока 2 умножения. Таким образом, первый блок 2 умножения формирует произведение входных сигналов {t)H y{t), а первый сумматор 3 сигнал z(t), соответствующий сумме указанного произведения и входного сигнала корректируемого преобразователя y(t). При этом z(t) оказывается равным z(t) рХ. Блок 4 формирования производных выходного сигнала y(t) корректируемо го преобразователя предназначен для получения первой и второй производно выходного сигнала корректируемого преобразователя, т.е. y(t) и yCt), Он состоит из первого и второго дифференциаторов 5 и 6 включенных так, что выход первого дифференциатора 5 подключен к первым входам второго ди ференциатора 6, первого и второго бл ков 2, 8 умножения и второго сумматор 10. Выход второго дифференциатора 6 подключен к первому входу третьего блока 9 умножения. Блок 7 формирования динамического коэффициента предназначен для определения динамического коэффициента {t) корректируемого преобразователя согласно алгоритма получаемого из уравнения,,. нСб. (t)v(t)ve(t)i((t)o ci)i() dt Он содержит второй и третий блоки 8,9 умножения, второй сумматор 10 и интегратор 11. Второй и третий бло ки 8,9 умножения блока формирования динамического коэффициента предназна чены для осуществления произведения 4 :(t) на y(t) и e(t) на y(t), где e(t) и (t) формируются на выхо-; дах второго сумматора 10 и интегратора 1 1 . Выходы второго и третьего блоков 8,9 умножения вместе с выходом первого дифференциатора 5 подключены на выходы второго сумматора 10, подключенного на вход интегратора 1 и второй вход второго блока 8 умножения. Подключая к первым входам второго и третьего блоков 8,9 умножения выходы первого и второго дифференциаторов 5 и 6 получают на выходе второго сумматора 0 сигнал t(t), а на выходе интегратора JI - сигнал &(t). Второй сумматор 10 обеспечивает выполнение операции суммирования согласно уравнению (1), вьщает сигнал (t) , а интегратор 11, интегрируя последний, формирует сигнал (t). Одновременно выход интегратора 11 подключается к второму входу первого блока 2 умножения. Устройство работает следующим образом. Выходной сигнал корректируемого преобразователя y{t), удовлетворяющий дийиЬеренциальному уравнению 6(t)y(tby(t) , где Xf. - входной сигнал; fc(t) - динамический коэффициент Преобразователя; k - передаточный коэффициент, который поступает на вход корректирующего устройства 1, являющегося входом первого сумматора 3. - Одновременно сигнал y(t) поступает на вход блока 4 формирования производных, являющегося входом первого дифференциатора 5. Выход первого дифференциатора 5 вьщает сигнал y(t), а второго дифференциатора 6 выдаетсигнал y(t). Первый и второй являются первой и второй производной сигнала y(t), обусловленного воздействием входного сигнала Х;-, на вход прербразователя. Можно получить уравнение (t)yx xCt) (t)) (t)0 , имеющего место при постоянстве сигнала XQ и нестационарности .(t). Исходя из этого уравнения составляют алгоритм определения (t) по значениям y(t) и V(t)Для этого строится блок 7 формирования динамического коэффициента, содержащего второй и третий блоки 8 и 9 умножения,второй сумматор 10 и интегратор 11, обеспечивающих за счет двух обратных связей фоомиоование сигналов (t) и (t). Устройство 7 является обычным устройством для решения дифференциального уравнения () при введении сигнала |у(с) на вход второго блока 8 Iумножения и второго сумматора 10, а сигнала y(t) на вход третьего блока 9 умножения. При введении выходного сигнала (t) на второй вход первого блока. 2 умножения,обеспечивающего умножение (t) на y(t), получаем выходной сигнал, соответствующий 8(t)y(t). Этот сигнал, поступая на вход первого сумматора 3 вместе с выходным сигналом корректируемого преобразователя y(t), обеспечивает на выходе сумматора 3 выходной сигнал z(t). z(t)e(t)y(t)-y(t), который согласно уравнению (1) определяется z(t) Таким образом, адаптирующееся корректирующее устройство позволяет определить по значениям выходного сигнала корректируемого преобразователя сигнал, воздействующий на его вход. Преимуществом предлагаемого устройства является то, что точность повыщается благодаря правильного подбора динамического коэффициента, вве денного в корректирующее устройство. Если отклонение значения изменяющего динамического коэффициента происходи на 1%-3% от номинального введенного коэффициента, погрешность выходного сигнала составляет также 1%-3%. При точном введении динамического коэффициента погрешность, связанная с неточностью введения динамического коэффициента, отпадает. Формула изобретения Адаптивное корректирующее устройство, содержащее первый дифференциатор и последовательно соединенные первый блок умножения и первый сумматор, второй вход которого соединен со входом первого дифференциатора, отличающееся тем, что, с целью повышения точности устройства, оно содержит второй дифференциатор и последовательно соединенные второй блок умножения, второй сумматор, интегратор и третий блок умножения, выход первого дифференциатора соединен со вторым входом второго сумматора, первыми входами первого и второго блоков умножения, а через последовательно соединенные первый дифференциатор, третий блок умножения и второй сумматор - со вторым входом второго блока умножения, выход интегратора соединен со вторым входом первого блока умножения. Источники информации, принятые во внимание при экспертизе 1.Клаус М. и др. Измерительные инормационные системы мер. М., 1975, ; 227-230 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU550617A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |