(54)КОМАНДНОЕ УСТРОЙСТВО ДЛЯ ЦИКЖЧЕСКОГО УПРАВЛЕНИЯ
Изобретение относится к программным устройствам управления, в частности в станкостроении, и может быть использовано в станках с повторяющимся циклом, например в мехаиообрабатывающих, сборочных, контрольно-сортировочных и других.
Известно командное устройство, содержащее распределительный вал с регулируемыми кулачками и закрепленный .на основании датчик, взаимодействующий с кулачком посредством рычага. Регулируемый кулачок состоит из двух частей. Смещая одну часть кулачка относительно другой, регулируют угол ,j впадины кулачка.- Способ настройки командного устройства заключается в том, что сначала устанавливают вал командного усиройства, в положение начала команды выставляют одну часть регулир е- мого кулачка на включение и закрепляют, затем устанавливают вал командного устройства в положение конца команды, выставляют вторую часть регуТЕХНОЛОГИЧЕСКШ ОБОРУДОВАНИЕМ
лируемого кулачка на выключение и закрепляют l1.
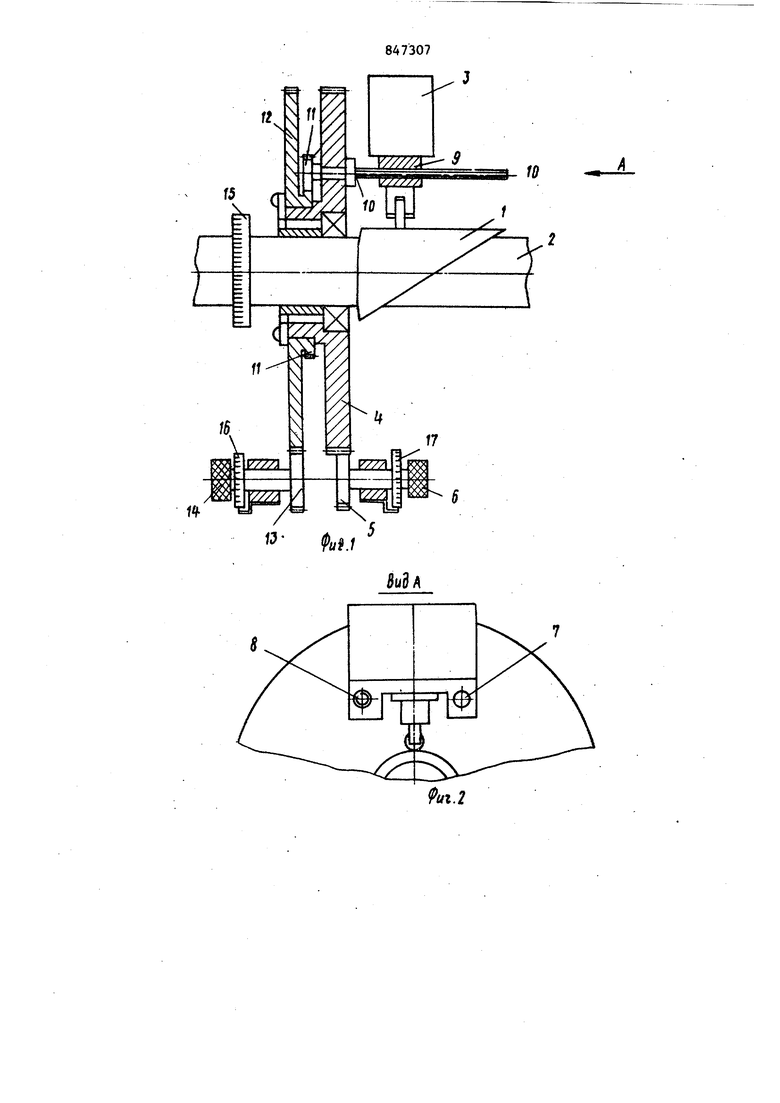
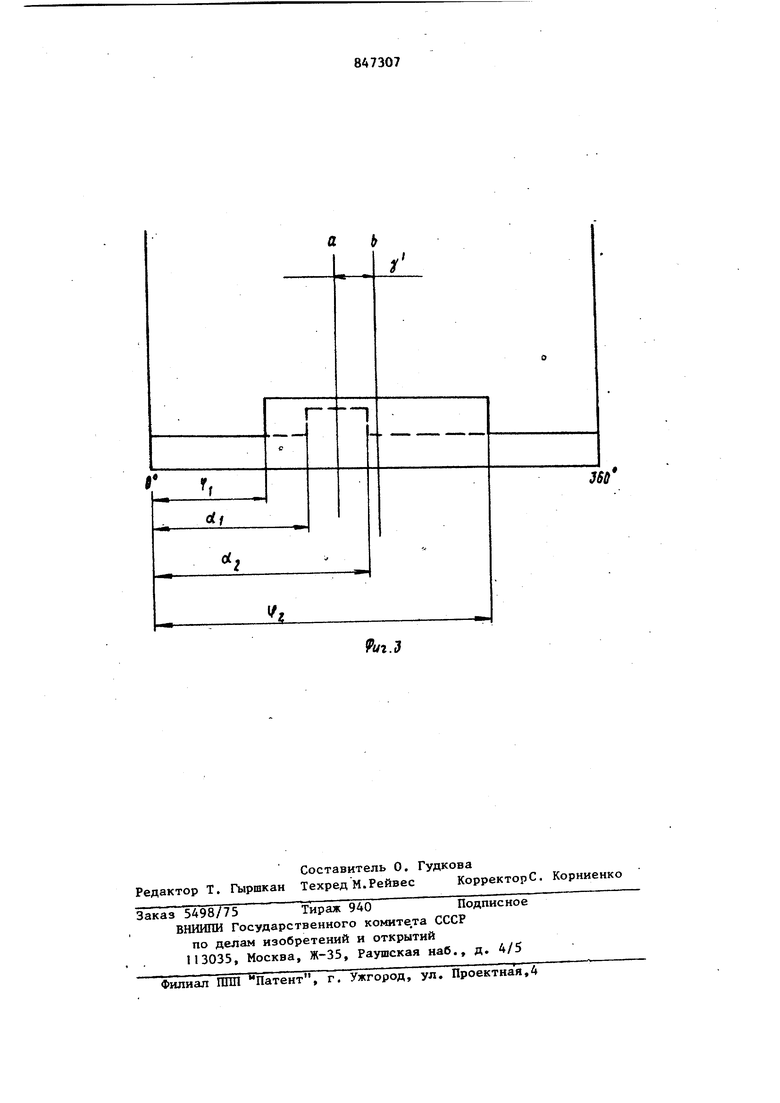
Недостатком,данного устройства является ограниченность диапазона регулирования по длительности. Насткройка неудобна и длительна, так как . каждая половинка кулачка выставляется по углу с последующей проверкой по лимбу вала, уточнением к снова проверкой до тех пор, пока не достигается необходимый угол включения и выключения датчика. Максимальный диапазон регулирования не превышает 180°, а кулачки не имеют механизмов регулирования и устанавливаются вручную, Наиболее близким по технической сущности и достигаемому результату является командное устройствоj вклю- . чающее кинематически связанный с управляе елм механизмом однооборотный вал, с закрепленными на нем кулачкуми, взаимодействующими с расположёнными на траекториях их движения ,выми датчиками, при этом кулачки выполнеш с у растянутьаз на весь код регулировки, и с пoдъe гoм профиля, пропорциональным парег-шш.е ниюэ & путев54е дат1мкн снабжйшл, j eхййизмами для регулирования нх в каправлении подъема профиля кулачков Способ настройки этого устройства заключазтся в том, что вал командного устройства устанавлизают в яоло-жение качала команды а затем с помощью устройства для рагулироваазия перемещают путевой датчик в направ.леиии подъема профШ1я кулачка до его включения. Таким способом можно получить ЗСОманду ms6ou длительности, ко fjesosяожно смещать ее по интервалу такта сонец команды невозможно снестнт-ь), так как кулачок жестко устанозлен не валу. Цель изобретения - расширение сЗ™ лзетн применения цутем получсння команды заданной длительности в любом интервале времени. Указанная цеяь достигается темз что командное устройство для циклического управлений технологичасккм оборудованием содерл ащее к нелаткческн связаи1{ый с приводом вал, на котором закреплены кулачки по числу команд, путевые датчики размещенные по траектории движения и. механизмы регулирования псремеще ния путевого датчика, каждый регулирования перемеп;еиия пут°еяого датчика состоит из шестерни, устаноаленной на валу с воэможкостью поворота привода перемещения путевого датчика по кулачку вокруг оси вала, соединенного с шестерней, направляю щих,установленных в шестерне паралле но оси 1эала, каретки, аэнещанкой на направлягащ1-1Х с закреплеянь&ш на ней путевым датчиком пары-зинт-гайка8 жестко скрепленной с кареткойj и прк вода перемещения путевого датч54ка вдоль оси эала, кинематкческн сов динённого с винтом. На фиГа, I изображена конетрукт1 Э иая схема предлагаемого устройства на фиг. 2 - вид А на фиг. 15 ла фиг, 3 - 1у4клограмма работы устрой- ства. Командное устройство содерет«т ку лачки 1, установленные на валу 2 и путевые датчики 3, снабженз-ше механизмами регулирования перемещени am (вдоль и вокруг оси вала 2). Меканизм регулирования перемещений njтевсго датчика содержит шестерню 4, соедкнениую с шестерней 5 привода 6 перемещения путевого датчика по кукачку вокруг оси вала 2. Шестерня 4 снабжена каправляющими 7 и 8, установленными параллельно оси вала 2. На них размещена каретка 9 с путег выьз датчиком 3, .кинематическая пара онкт-гайка 10, гайка которой жестко скреплена с кареткой 9, а винтЪн является направляющая 8, кинематически соедзишнная .через шестерни е приводом 14 перемещения путевого датчкха 3 вдоль оск вала 2. На валу 2 установлен лимб 15, Приводы 6 и 14 снабжены лим5ами 16 и 17, Командное устройство настраивается следующим образом. Для получения «омйнды заданной .длительности в заданном интервале такта проворачивают вал 2 на один оборот, 4 :кскруя по лимбу 5углы включения и выключения путевого датчика 3, сравнивают эти углы с углами, заанными по циклограмме, н при их расхождении определяют величины смеще}шн путевых датчиков вдоль оси вала и во-руг оси вала, Величина смещения путевого датчика вдоль оси равна Bv%i±2:iilll где % я f д начало и конец заданной команды, град; d- начало и конец произвольной команды, град; L - длина усеченной части цилиндра, мм. Величина углового смещения путевого датчика вокруг оси вала равна ,.± „sLil . а. г Затем определяют угловые величины смещешш приводов с учетом передаточкыя; отношений механизма регу;1ирозанмяс Зти величины определяются Веянчина смещения привода перемеа ейия путевого датчика вдоль ва 8 « jbf где t. - mar пары винт-гайка, yj. - передаточное отношение узла .перемещения путевого датчика вдоль оси вала. Величина смещения привода поворота путевого датчика вокруг оси вала З--. 4 - передаточное отношение уз ла поворота вокруг оси. Учитывая (1)и (2),получают окончательные формулы, дающие возможность определения угловых величин смещения приводов U4a-4.).i.)H/ 360t .-Jla±iei 5tM V . ч 2 /2 Пусть требуется получить команду с началом концом4 2 29Qf« При вращении вала на один оборот определяем углы начала и конца произ вольной команды oCi 40°, Данные кулачка: длина i 120 мм, пе редаточные отношения механизмов i «I -i 5. По формулам определяем угловые величины умещения приводов механизма регулировки Г(29о-аоу моо-40 360--Ь .,,.,..,,y. Перемещая вращение привода на вычисленные величины, получают соответ ствующее перемещение путевого датчик в соответствии с заданной командой. При включении привода командного устройства кулачки 1, установленные уСТрОИСТВа кулачки l , установлнгнныс валу 2, получают вращение и, в соот ствии с циклограммой, включают и вю чают путевые датчики 3, управляннчие исполнительными механизмами. Такое выполнение командного устройства позволяет расширить техноло 84 , 6 еские возможности устройства путем олучения команд заданной длительости в любом интервале такта, исклюив все промежуточные замеры углов включения и выключения путевых датчиков, что упрощает обслуживание оборудования, требующего .в процессе работы изменения длительности или варьирования в интервале такта. формула изобретения Командное устройство для циклического управления техиоло1 ическим оборудованием, содержащее кинематически связанный с приводом вал, на котором закреплены кулачки по числу команд, путевые датчики, размещенные по траектории движения кулачков, и механизма регулирования перемещения путевого датчика, отличающееся тем, что, с целью расширения области применения путем получения команды заданной длительности в любом интервале времени, каждый механизм регулирования перемещения путевого датчика состоит из шестерни, установленной на валу с возможностью поворота привЪда перемещения.путевого датчика по кулачку вокруг оси вала, соединенного с шестерней, направляющих ус танов ленШ)1х в шестерне параллельно оси вала, каретки, размещенной на направляющих, с закрепленюлт на ней путевым датчиком пары винт-гайка, жестко скрепленной с кареткой, и привода перемещения путевого датчика вдоль оси вала кинематически соединенного с винтом. Источники информации, принятые 40 внимание при экспертизе 1. Автоматы для контроля размеров в машиностроении. Бюро взаимозаменяе- ж- л ,.«----. ленности. М., Стандартгиз, I960, с.75. 2. Авторское свидетельство СССР 364418, кл. В 24 В 51/00, 1972 (прототип).
«
w
| название | год | авторы | номер документа |
|---|---|---|---|
| Намоточный станок для изготовления стеклопластиковых изделий | 1972 |
|
SU476189A1 |
| Механизм подач | 1990 |
|
SU1785493A3 |
| Станок для обработки внутренней поверхности остова бочки | 1986 |
|
SU1437228A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| КОНТРОЛЛЕР ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2479728C1 |
| Давильно-печатный станок | 1955 |
|
SU108711A1 |
| МИКРОТОМ ДЛЯ БОЛЬШИХ СРЕЗОВ | 1969 |
|
SU234702A1 |
| Устройство для укладки в стопу плоских предметов | 1975 |
|
SU648432A1 |
| Устройство для регулирования плотности вязания на плосковязальной машине | 1990 |
|
SU1807128A1 |
| СПОСОБ УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2013227C1 |
n
Ш
