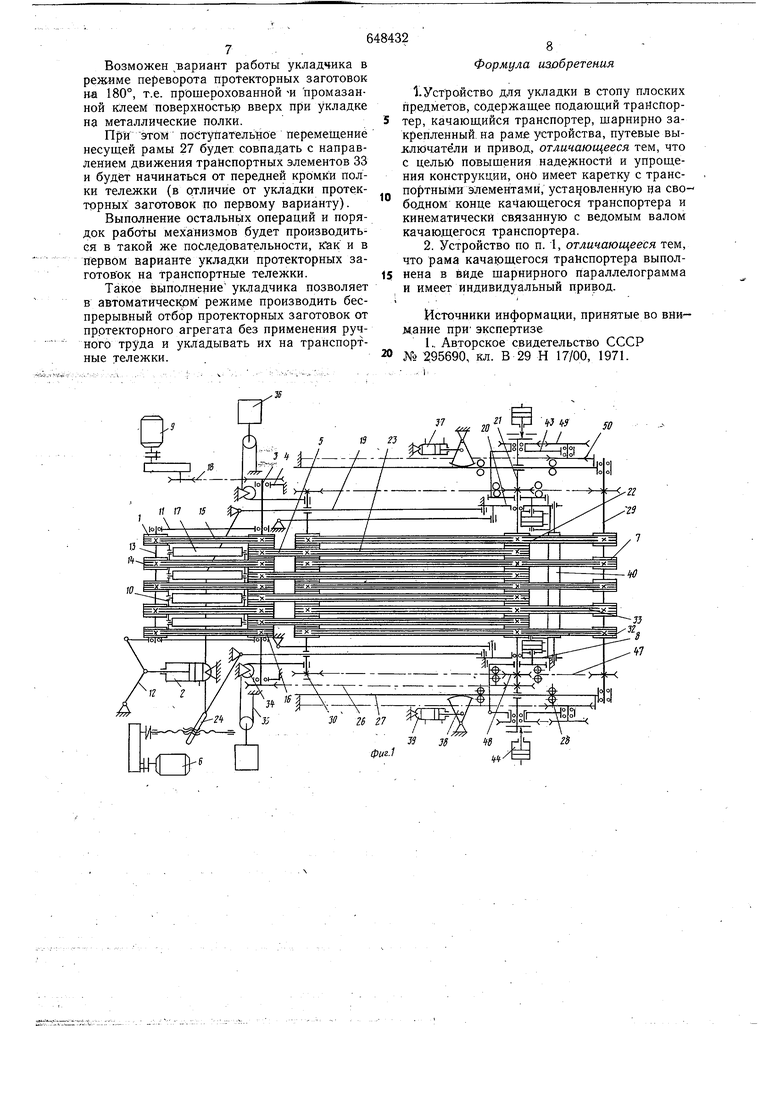
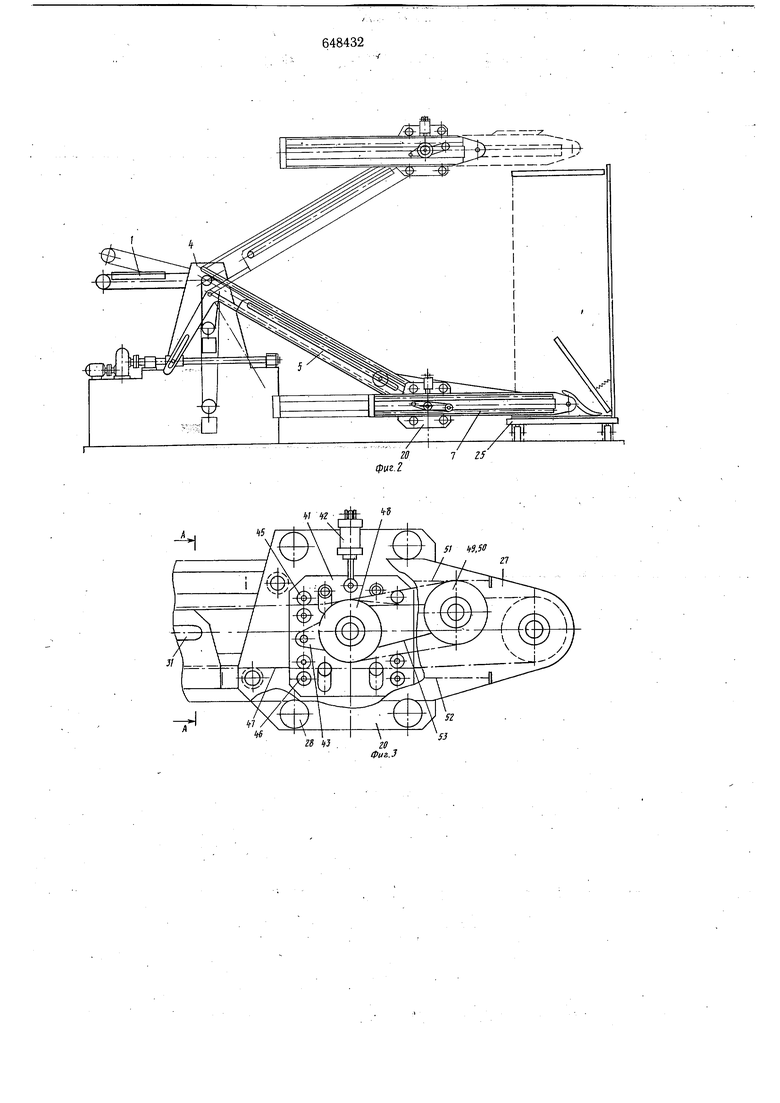
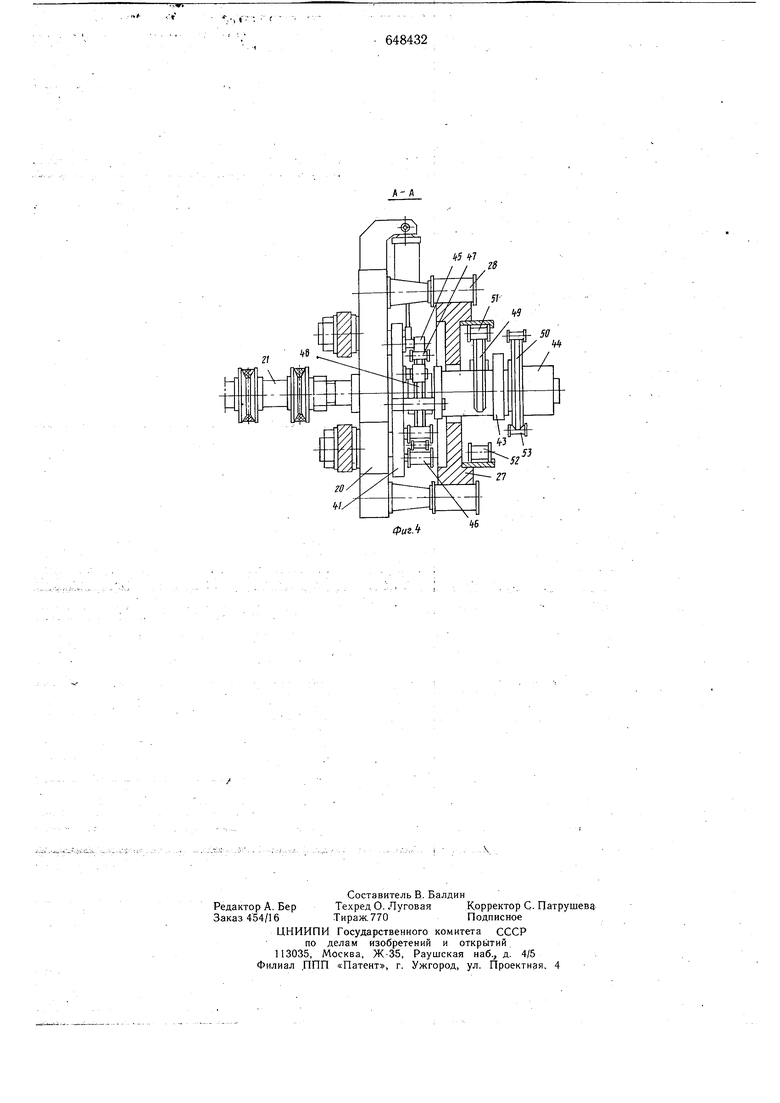
щийся в вертикальной плЬскости относительно ведущего вала 3 при помощи шагового привода 6, каретку 7 с механизмом перемещения 8, привод 9, предназначенный для приведения в движение, транспортных элементов, и приемный приводной рольганг ,10, встрое шый ,1В линию п тектОрНОго агрегата (не изображен на чертеже). Подающий транспортер 1 выполнен в виде многбручьевого Транспортера, состоящего из качающейся рамы 11, которая с одной стороны щарнирно закреплена на ведущем валу 3, а с другой при помощи рычажной системы 12 соединена С силовым приводом 2 и рамой приемного рольганга 10. На раме 11 установлен в подщипниках вал 13, WKOTopoTvf см бнтиройа,ны через определенный интервал щкивы 14. Вал 13 при помощи Грузонесущих элементов 15, например клиновидных ремней, соединяется с ведущим валом 3, на котором закреплены щкивы 16 с таким же интервалом, как и щкивы 14. В исходном положении транспортнь1е элементы располагаются в свободном пространстве между роликами 17 приемного рольганга 10, несколько их поверхности. Привод ведущего вала 3 осуществляется через цепную передачу 18. Качающийся транспортер 5 выполнен в виде многоручьевого транспортера, дискретно перемещающегося в вертикальной плоскости относительно ведущего вала 3 при помощи щагового привода 6, и состоит из рычажной рамы 19, выполненнЙй в виде щарнйрнОго параллелограмма, траверсы 20, на которой смонтирован ведомый вал 21 сощкивами,22, в ручьях которых размещены транспортные элементы 23. Звенья рычажной рамы 19 соединяют траверсу 20 сО станиной 4 и кйНематически связаны через систему рычагов 24 с -щаговым приводом 6. Такое выполнение рычажной рамы 19 обеспечива ет плоскопараллельное перемещение в вертикальной плоскости каретки 7 и подачу прожекторной заготовки параллельно плоскости полки тележки-книжки 25 (см. фиг. 2), Приводйыи валом качаюЩёгбся транспортера является ведущий вал 3, который связан с ведомым валом, 21 цепной передачей 26 и транспортными элементами 23; Одновременно ведомый вал 21 является приводным валом для каретки 7. Каретка 7 выполнена в виде гибкого многоручьевого транспортёра и содержит несущую раму 27, устанбвленную в роликовых направляющих 28, смбнтнрованных на траверсе 20, приводной вал 29, закрепленный в цапфах несущей рамы 27, натяжной вал 30, перемещающийся в продольных пазах 31 (с.м. фиг. 3), щкивы 32 и транспортные элементы .33, Для обеспечения постоянного натяжения транспортных элементов 33 натяжной вал 30 через отклоняющие блоки 34 и гибкуй связь 35 свЯзан с Подвижным грузом 36. Такое выполнение каретки 7 позволяет изменять ее вылет и получать гибкую, подвижную грузонесущую плоскость. Фиксация несущей рамы 27 взаданном положении осуществляется стопором 37 смонтированным на траверсе 20. Стопор 37 состоит из эксцентрикового зажима 38 и силового привода 39. Во избежание провисания ветвей транспортных элементов 33 при любом положении рычажной рамы 19 на траверсе 20 установлен ролйк 40. Возвратно-поступательное перемещение несущей рамьг Однонаправленное движение транспортных элементов 33,обеспечиваются механизмом перемещения 8. Механизм перемещения 8 кинематически связан с общим приводом 9 и смонтирован fia траверсе 20 и ведомом валу 21. Он состоит из каретки 41, подвижноустановленной на траверсе 20, силового привода 42, кинематически связанного с кареткой 41, двуплечегорычага 43, свободно установленного на ведомом валу 21 и щарнирно сблокированного с кареткой 41, и управляемой муфты 44, смонтированной на ведомом валу 21. Кроме того, на каретке 41 установлены с зазором для размещения ветвей цепи (верхние 45 и нижние 46) роликовые направляющие, взаимодействующие соответственно- с верхней или нижней ветвью цепной передачи 47 и обеспечивающие их зацепление со звездочкой 48, закреплённой на ведомом валу 21. Для обеспечения возвратно-поступательного перемещения несущей рамы 27 на свободном плече двуплечего рычага 43 смонтированы на одной оси звездочки 49 и 50. Звездочка 49 в зависимости от направления движения несущей рамы 27 периодически взаимодействует с верхней 51 или с нижней 52 втулочно-роликовой цепью, которые закреплены на направляющих щтангах несущей рамы 27 и :являются цепочным зацеплением. Звездочка 50 связана цепной передачей 53 с управляемой муфтой 44. При включении управляемой муфты 44 несущая рама 27 будет перемещаться в ту или иную сторону в зависимости от того, с какой цепью 51 или 52 будет находиться в Зацеплении, звездочка 49. При выключении управляемой муфты 44 несущая рама 27 автоматически фиксируется в заданном положении стопором 37. Синхронизация и порядок работы механизмов устройства осуществляется от системы путевых выключателей при их взаимодействии с движущейся протекторной заготовкой. Работает устройство следующим образом. Перед пуском в работу транспортная тележка 25 (см. фиг. 2) выставляется относительно укладчика в ориентированном положении и закрепляется: После этого механизмы укладчика выставляют в исходное положение. Транспортные элементы 15 подающего трансЬортера 1 располагаются в интервале роликов 17 приемного рольганга 10 несколько ниже их поверхности, а. рычажная рама 19 механизма подъема опускается шаговым приводом 6 в нижнее положение, при этом каретка 7 должна находиться выше уровня платформы тележки 25, а несушая рама 27 йайтопорена в крайнем левом положении стопором 37. При поступлении на приемный ролБганг 10с отборочного транспортера протекторная заготовка передним срезом воздействует на шуп датчика, который посылает импульс на включение в работу привода 9, приводящего в движение транспортные элементы механизмов, силового привода 39 стопора 37, растормаживающего несущую раму 27, силового привода 42 механизма перемещения 8 и управляемой муфты 44. При этом каретка 41 под воздействием силового привода 42 перемещается из нейтрального положения вниз и верхними роликовыми направляющими 45 вводит в зацепление со звездочкой 48 верхнюю ветвь цепной передачи 47. Одновременно соединепный с кареткой 41 двуплечий рычаг 43 поворачивается против часовой стрелки вокруг оси ведомого вала 21 и вводит в зацепление звездочку 49 с втулочно-роликовой цепью 51, закрепленной на направляющих штангах несущей рамы 27. При включении -управляемой муфты 44 несущая рама 27 каретки 7, вращающейся звездочкой 49, выдвигается к задней кромке платформы тележки 25. При достижении задранного положения выдвижение несущей рамы 27 автоматически прекращается и одновременно происходит ее фиксация стопором 37, отключение управляемой муфты 44 и прекращение вращения звездочки 49. Когда протекторная заготовка по всей длине уложится на ролики 17 приемного рольганга 10, она входит в .соприкосновение своим передним срезом со вторым датчиком, от которого поступает команда на включение в работу привода 2, воздействующего при помощи рычажной системы 12 на качающуюся вокруг ведущего вала 3 раму 11. При этом движущиеся транспортные элементы 15 поднимаются выше поверхности роликов 17 приемного рольганга 10, входят в соприкосновение с нижней поверхностью протектора и одновременно смещают его р поперечном направлении на сочлененные грузонесущие элементы 23 качающегося транспортера 5, последние перемещают протектор на каретку 7. После схода протекторной заГОТОВКИ С Транспортных элементов 15 рама 11 автоматически опускается к приему следующего протектора. При дальнейшем своем пе;ремещении протекторная заготовка своей ббкевой кромкой входит в соприкосновение с щупом датчика каретки 7. В этом случае от данного датчика поступает импульс к силовому приводу 39 стопора 37 для растормаживания несущей рамы 27 и к силовому приводу 42 механизма перемещения 8. Силовой привод 42 воздействует на каретку 41 и перемещает ее вверх от нейтрального положения, а закрепленные на ней нижние роликовые направляющие 46 вводят в зацепление со звездочкой 48 нижнюю ветвь цепной передачи 47, при этом двуплечий рычаг 43 поворачивается по часовой стрелке и вводит в зацепление с втулочно-роликовой цепью 52 звездочку 49. При включении управляемой муфты 44 связанная с ней звездочка 49 через звездочку 50 и цепную передачу 53 начинает вращаться, а несущая рама 27 каретки 7 при этомпоступательно перемещается в роликовых направляющих 28 к передней кромке платформы тележки 25. Так как направление движения транспортных элементов 33 не изменяется, протекторная заготовка постепенно сходит с них и укладывается на поверхность полки тележки 25 (см. фиг. 2). После схода протекторной заготовки с каретки 7 автоматически происходит останов несущей рамы 27, ее фиксация стопором 37 и отключение управляемой муфты 44. Если щирина полки позволит укладывать следующий ряд, то цикл укладки повторится аналогично до полного заполнения откидной полки тележки ,25 по ширине. После этого рабочий опускает следующую полку или прокладку, а каретка 7 автоматически при помощи шагового привода 6 поднимается до высоты опущенной полки, несколько выше ее поверхности с учётом толщины укладываемого протектора. При поступлении нового протектора так же будет происходить его переход с движущей поверхности транспортных элементов 33 на поверхность полки тележки. Порядок загрузки последующих полок тележки аналогичен. После окончания процесса загрузки телейска убирается, а на ее место устанавливается другая. Во время установи ее шаговый 1Ч5ИВОД 6 автоматически возвращает рычажную раму 19 с кареткой 7 в нижнее исходное положение и укладчик готов к загрузке протекторов. Минимальный и максимальный углы наклона и подъема рычажной рамы 19 механизма подъема устанавливаются с помощью регулируемых по высоте Датчиков, что позволяет задавать заранее нужную высоту укладки протекторов. «..«Процесс укладки протекторов на грузовь1е платформы тележек с откидными прокладками аналогичен процессу укладки протекторов на металлические откидные полки .тележек-книжек.
Возможен вариант работы укладчика в режиме переворота протекторных заготовок на 180°, т.е. прОшерохованной -и промазанной клеем поверхностью вверх при укладке на металлические полки.
При этом поступательное перемещение несущей рамы 27 будет совпадать с направлением движения транспортных элементов 33 и будет начинаться от передней крОмки полки тележки (в ртличие от укладки протекторных заготовок по первому варианту).
Выполнение остальных операций и порядок работы механизмов будет производиться в такой же последовательности, как и в первом варианте укладки протекторных заготовок на транспортные тележки.
Такое выполнение укладчика позволяет в автоматическим режиме производить беспрерывный отбор протекторных заготовок от протекторного агрегата без применения ручного труда и укладывать их на транспортные тележки. 5IS 2J /7 ;j fo Ч .-.-Л ч /
Формула изобретения
1 Устройство для укладки в стопу плоских предметов, содержащее подающий трайспортер, качающийся транспортер, шарнирно закрепленный на раме устройства, путевые выключатели и привод, отличающееся тем, что с цельй повышения надежности и упрощения конструкции, оно имеет каретку с транспортными элементами, уста1}овленную на свободном конце качающегося транспортера и кинематически связанную с ведомым валом качающегося транспортера.
2. Устройство по п. 1, отличающееся тем, что рама качающегося транспортера выполнена в Виде щарнирного параллелограмма и имеет индивидуальный привод.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 95690, кл. В 29 Н 17/00, 1971. fO
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ УКЛАДКИ В СТОПУ ПРОТЕКТОРНЫХ ЛЕНТ | 1971 |
|
SU295690A1 |
| Устройство для передачи заготовок протекторов | 1980 |
|
SU956295A1 |
| ЗАГРУЗЧИК ЗАГОТОВОК ПРОТЕКТОРОВ КРУПНОГАБАРИТНЫХ ШИН | 1969 |
|
SU251455A1 |
| Устройство для укладки заготовок протекторов | 1980 |
|
SU973390A1 |
| АВТОМАТ УКЛАДКИ СВАРОЧНЫХ ЭЛЕКТРОДОВ В КОНТЕЙНЕР | 1996 |
|
RU2138380C1 |
| Поточная линия | 1975 |
|
SU590142A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Линия разгрузки камерных сушил и укладки керамических изделий в пакеты для обжига | 1985 |
|
SU1288079A1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Устройство для укладки невулканизованных деталей | 1990 |
|
SU1812129A1 |
it.se
ifS f7
28
f
Фuг.
