(54)ПРИВОД КООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ 1
Изобретение относится к автоматике и предназначено для использования в системах программного управления движущимися объектами.
Известный привод координатных перемещений для каждого направления враще-. ния вала содержит отдельную ступицу, обойму, ролики и сепаратор
Однако в таком приводе усложнена конструкция и управление его работой.
Наиболее близким к предлагаемому по технической сущности является привод координатных перемещений, содержащий вал с жестко установленной на ,5 нем втулкой, снабженной упорами, ролиКи, расположенные в отверстиях сепаратора, установленного на валу и снабженного упорами, и обойму, причем упоры, на втулке и препараторе связаны jg с фиксаторами, а участок вала, на котором установлены тормозные пластины, выполнен с двусторонним з аклиниванием роликов 2.
Недостатком этого привода.является то, что каждый раз для изменения направления вр.ащения вала и передачи на него крутящего момента требуется перемещать сепаратор в осевом направлении що зацепления с обоймЬй. Это приводит к использованию одной дополнительной команды, усложняет конструкцшо привода, а главнбе - управление его работой,
Цель изобретения - упрощение конструкции привода.
Указанная цель достигается тем, что в приводе координатных перемещений, содержащий вал с жестко установленной на нем втулкой, снабженной упорами, ролики, расположенные в отверстиях сепаратора, установленного . на валу и снабженного упорами, и обойму, причем упоры на втулке и сепараторе связаны с фиксаторами, а участок Всша на котором установлены тормозные пластины, выполнен с двусторонним заклиниванием роликов, сепаратор
установлен на валу неподвижно в осевом направлении, а внутренняя поверхность обоймы сопряжена с внешней поверхностью сепаратора.
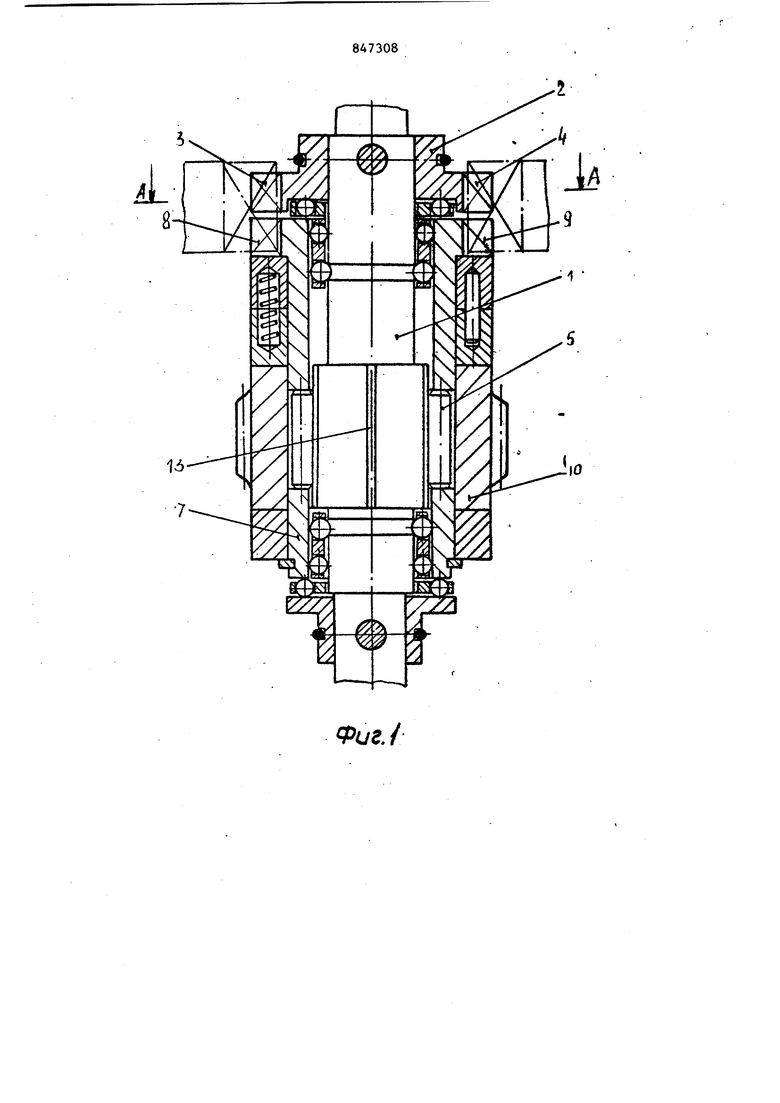
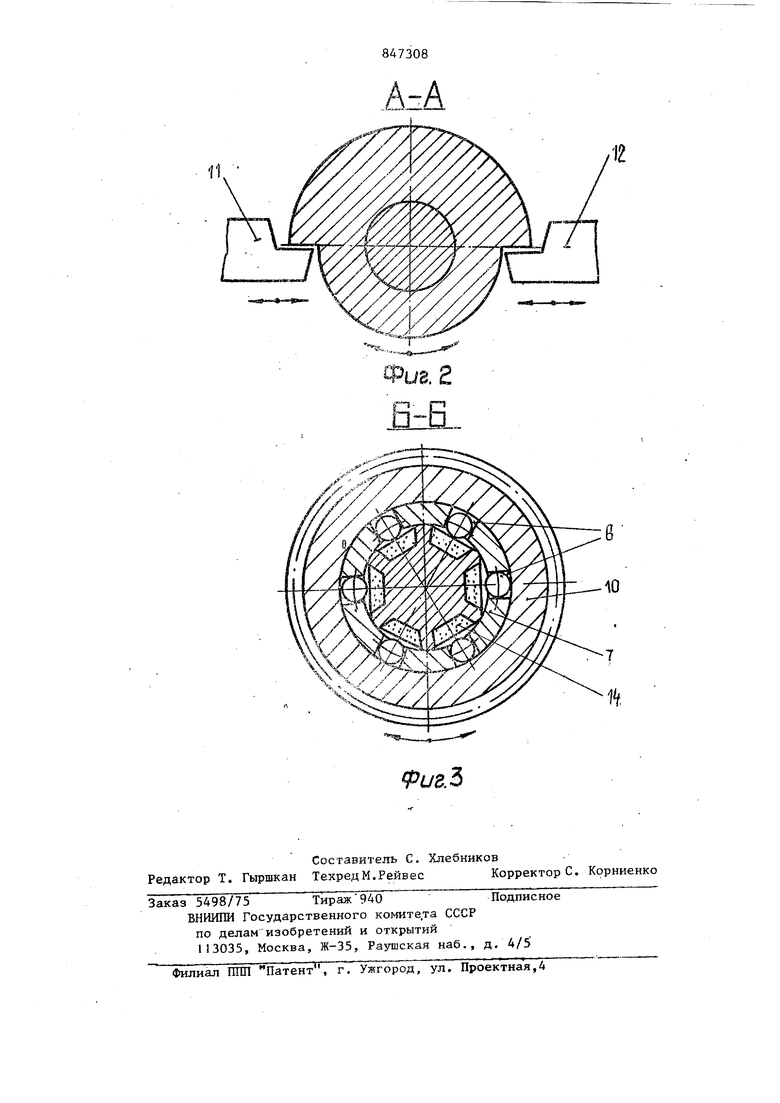
На фиг. 1 изображена конструкция привода координатных перемещений, разрез по оси; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение БHji фиг. 1 ,
Привод содержит вал 1 с втулкой 2, имеющей упоры 3,4 и жестко установленной на валу, ролики 5, расположенные в отверстиях 6 сепаратора 7., снабженного упорами 8 и 9, установленного на валу неподвижно в осевом направлении, и обойму 10, установленную на поверхности сепаратора с обе :печением постоянного контакта. Упоры на втулке и сепараторе связаны с фиксаторами П и 12, Участок 13 вала, на котором установлены тормозные пластин 14, выполнен с двусторонним заклиниванием роликов.
Привод работает следующим образом В начальный момент обойма 10 враща ется в одном из направлений, например по часовой стрелке, при этом втулка 2 и сепаратор 7 зафиксированы фиксаторами П и 12. Затем фиксаторы 11 и 12 выводят из зацепления с упорами 3,4 втулки 2 и упорами 8,9 cei7aратора 7. Сепаратор 7 проворачб1вается за счет сил трения на некоторый угол в направлении вращения обоймы 10, и ролики 5 заклиниваются между вращающейся обоймой 10 и тормозными пластинами 14 участка 13 вала. Это приводит к передаче крутящего момента валу I, который начинает вращаться в направлении вращения обоймы,
Для останова и фиксации вала 1 фиксаторы 11 и 12 вводэт во взаимодействие с упорами 3,4 втулки 2 и упорами 8,9 сепаратора 7. В результате сдвига плоскости упоров 3 и 4 по отношению к плоскости упоров 8 и 9 в первую очередь во взаимодействие с фиксатором 12 вступает упор 9 сепаратора 7, который, проворачиваясь
против часовой стрелки относительно вала I, расклинивает ролики 5, и передача крутящего момента от обоймы 10 к валу 1 прекращается. Вал 1 по инерции проворачивается до взаимодействия с фиксатором 12 упора 4 втулки 2, При этом фиксатор II, скользя по поверхности с большим диаметром втулки 2, перемещается до взаимодействия с упорами 3,8 и исключает возможность проворота вала 1 и сепаратора 7 в обратном направлении. Вал I проворачивается только на целое число оборотов. Направление его вращения зависит от направления вращения обоймы 10.
Выполнение привода с обеспечением постоянного контакта обоймы с сепаратором устраняет необходимость в осевом перемещении последнего, а следовательно. Позволяет убрать одну команду и достичь упрощения конструкции и управления работой привода.
Формула изобретения
Привод координатных перемещений, содержащий вал с жестко установленной на нем втулкой, снабженной упорами, ролики, расположенные в отверстиях сепаратора, установленного на валу и снабженного упорами, и обойму, причем .упоры на втулке и сепараторе связаны с фиксаторами, а участок вала, на котором установлены тормозные пластины, выполнен с двусторонним заклиниванием
роликов, отличающийся тем, что, с целью упрощения привода сепаратор установлен на валу.неподвижно в осевом направлении, а внутренняя поверхность обоймы сопряжена с внешней поверхностью сепаратора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 490113, кл. 6 05 6 21/00, 1973.
2,Авторское свидетельство СССР № 647678, кл. G 05 G 21/00, 1976.
Фиг. /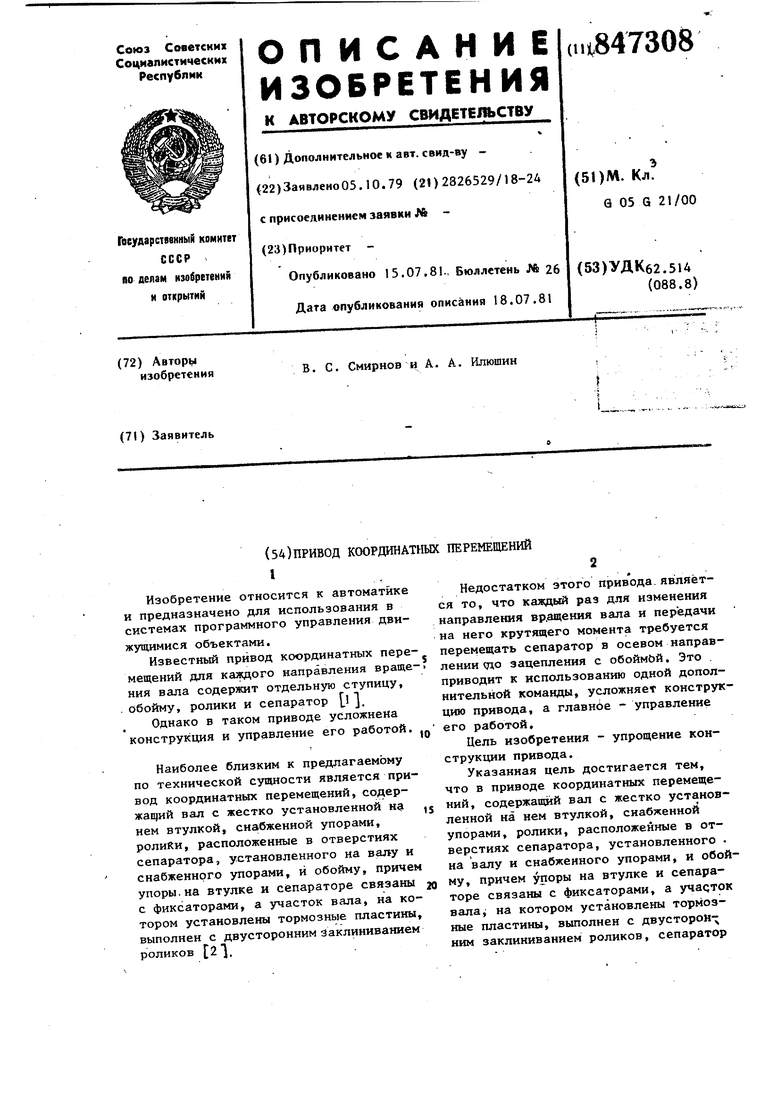
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод координатных перемещений | 1976 |
|
SU647678A1 |
| Привод координатных перемещений | 1973 |
|
SU490113A1 |
| Механизм свободного хода | 1983 |
|
SU1171616A1 |
| Механическая импульсная передача | 1986 |
|
SU1308799A1 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1971 |
|
SU311065A1 |
| Коробка передач | 1983 |
|
SU1191656A1 |
| ЗАМОК КОДОВЫЙ | 2000 |
|
RU2194141C2 |
| Устройство для двусторонней чистовойи упРОчНяющЕй ОбРАбОТКи лиСТОВыХдЕТАлЕй | 1979 |
|
SU846247A1 |
| Устройство для обучения опиливанию | 1990 |
|
SU1796366A1 |
| Привод стартера | 1976 |
|
SU848729A1 |