Изобретение огносится к области определения параметров транспортных потоков с цепью контроля и управления дорожным движением, в частности оно преднааначе- .но для измерения скорости движения транспортных средств, фиксации количества транспортных средств, превьпиающих установленный оператором предел разрешенной скорости движения, и информирования води телей об этом превьпиении. Известно устройство для определения превышения скорости автомобилей, содержащее два датчика, блок переключения, блок вычисления скорости, схему принятия решения и блок фиксации и воздействования l. Однако известное устройство обладает малой информативностью. Наиболее близким по технической сущносгй к предлагаемому является устройство, которое включает два датчика, элекгро ный ключ, { варцевый генератор, снетчик, ключ, включаемый счетчиком, блок обнаружения превьшения скорости и блок фиксации. Недосгагком указанного устройства является невозможность усгановкв дифференцированных (федеяов скоростей для разных типов транспортных средств, в частноств установки дафф енццрованных пределе скоростей для легковых в грузсеых автомашин, что особенно важно для обеспечения высоксяго безопасноств дввженияу В свою очередь отсутствие возможности оченить в фиксврой гь превышенве установленной дифференцщ)ованнсй скорости движения в зависимости от степени превышэ ния (где V - измереннаяскорость хюиженвя транспортного средства; фиксированная скорость огранв-. сужает функциональные возможноств устройства, так как в заввсвмоств от степени превышения установленной дифференщфованнс скорости движения могут быть выаботаны различные виды воздействия, т.е.
шффмадксжкое предупреждение, фогсграфврованве нарушенсш, немедленное задержание (при К значигельно превьпнающем 1) и г.п.
Цель изобретения - расширение функдиональных воэможносгей устройсгва.
Посгавленная цель достигавгея тем, что, в ургройство, содержавшее два индукгиёных датчика, соединенных с последовательно включенными частотным преобразователем, блсжом формирователей Импульсов блоком переключения, а также блежом фиксации, введены блок распознавания типа транспорта, блок сравнения и деши4рации, блок управления, блок ггреобразования скорости, блок преобразования интервала. времани, выход блока перекдючения через блок преофазования скфости соединен с первым входом блока фиксации и с первым входом блока сравнения, втфой вход которого через блок определения типа транспорта соединен с выходом частотного преобразователя,гретий вход блока сравнения соединен с первым выходом блора управления, второй вьвсод котфсхго подключен к первому шсоду блока сравнения и дешш|рации втсрой вход которого соединен с выходом блока сравнения, третий.вход блока сравнения и дешифрации типа транспорта, а выход блока сравнения и дешифации соединен со втфым входом блока фиксации.
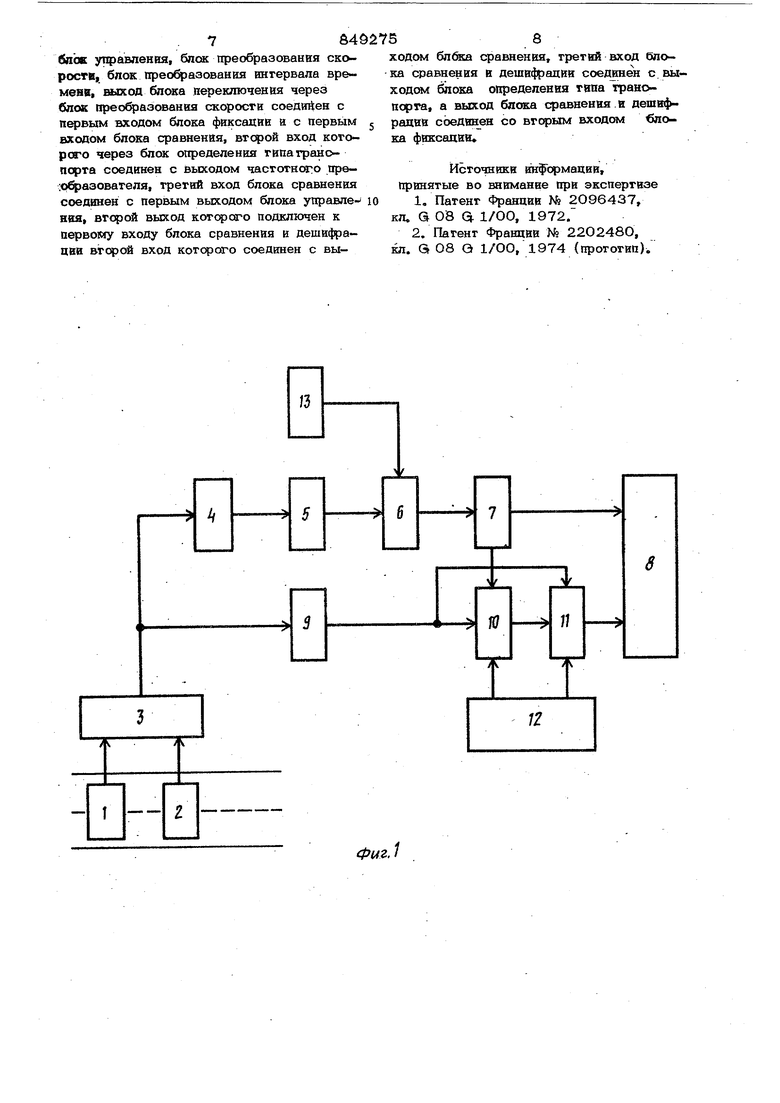
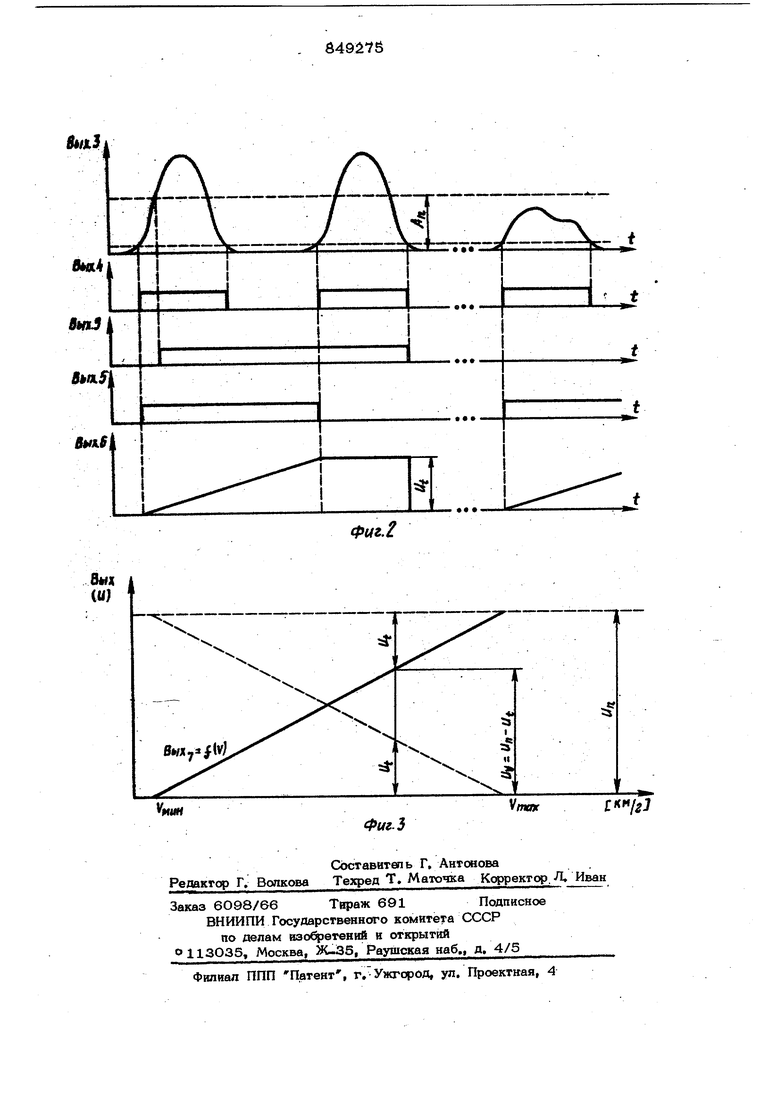
На фиг. 1 приведена структурная схема устройства фиксации превышения разрешенной сксфости,движения; на фиг. 2 и 3 - временные диаграммы работы устройства.
Устройство содержит индуктивные петлевые датчики 1 и 2, аодключенные к соответствующим входам частотного преобразователя 3, выход котфого поканально
через последовательно включенные блок 4 формирователей импульсов, блок 5 переключения, преобразователь 6 интервала времени и блок 7 преобразования скорости соединен с вторым входом блока 8 фиксации, и через последовательно включенные блок 9 распознавания типов транспорта, блок 10 сравнения и блок 11 сравнения и дешифрации соединен с первым входом блока 8 фиксации, в свою очередь блок 12 управления поканально соединен с вторыми входами блока Ю сравнения и блока 11 сравнения и деши4рации, при этом третий вход блока 11 сравнения и дещи4 ации соединен с выходом блока 9 распознавания ипов транспорта, а третий вход блока 1О сравнения соединен с вторым выходом блока 7 прео азования скорости, выход источника 13 постоянного ока соединен с вторым входом преобразователя 6 интервала времени.
Устройство работает следующим образом.
прохождении транспсртнсяго средства над индуктивньп 1И петлевыми датчиками 1 и 2, их индуктивность значительно изменяется. Изменение индуктивности петель соответственно вызывает изменение частоты частотного преобразователя 3, и на его выходе получаются импульсы напряжения, форма котсрых зависит от раз- меров и-типа, а также от скорости транспсртнс«го средства (фиг. 2). Импульсы напряжения подаются на входы блока 4 формирователей импульсов и блока 9 распсвнавания типов транспорта.
Блок 9 распознавания типов транспорта представляет собой амплитудный дискриминатор, который выдает выходной сигнал при превьпиении входным сигналом устан овленньй пороговый уровень (фиг. 2), что соответствует переезду индуктивных датчиков легковым транспортным средством. Таким образом, при переезде датчиков 1 и 2 грузовым транспортным средством, на выходе блока 9 распознавания типов транспорта отсутствует сигнал, а при переезде датчиков 1 и 2 легковь м транспортным средством на выходе блока 9 распознавания типов транспорта появляется сигнал, который полается на первый вход блока 1О сравнения и третий вход блока 11 сравнения и дешифрации.
Одновременно аналоговые импульсы на вьдходе чйстотного преобразователя 3 через блок 4 формирователей импульсов, котфый формирует прямоугольные импупьсы определенной амплитуды и длительности, последовательно переключает блок 5 переключения, на выходе которого подключается ипмпульс, длительность котсрого офатно пропорцисиальна скорости Проезжающего транспортнбго средства (фиг,2) В свою очередь выход схемы 5 перекЛю чения соединен с первым входом преофазоватепя 6 интервала, времени, и сигнал на выходе блока 5 переключения коммутирует источник 13 постоянного тока для заряда элемш1та попамяТи - конденсатора в преобразователе 6 интервала времени с постоянным тсжом (фиг. 2).
При окончании импульса на выходе блока 5 переключения прекращаются коммутация источника 13 постоянного тока и одновременно и зарящ элемента памяти ксжденсатора в преобразователе 6 интервала времени. Напряжение U на выходе преобразователя 6 внт рвала времени 1фямо dpoпорционально промежутку времетги, в тече ние которого транспсртное средство преодолевает расстояние между датчиками 1 2 и обратно пропорциональное скорости. В блоке 7 преобразования скорости ве личина напряжения с выхода преофааова- теля 6 интервала времени, обратно про- порцисиальная скорости транса сртного ср детва, преофазуется в напряжение, прямо (фоаорцисяальное скорости (фиг.З). Блок 7 преобразования скооости схематически выполнен на диффере1щиальном усилителе, на один из входов которого подано постоянное напряжение 0 , а на второй вход потется натфяжёние (J. свыхода преобразователя 6 интервала времени (фиг, 3). Прямая зависимость величины напряженИя Uw на входе блока 7 преобразования скорости и скорости транспортного средства облегчает как процесс фиксации в блоке 6, так и процесс сравнения в блоке 10 сравнения, В зависимости от конкретных условий дорожного движения оператфом через блок 12 управления устанавливаются дифферен .цированные пределы разрешенной скорости движения. Схематически это может быть, выполнено на дифференциальном усилителе в блоке 10 сравнения, на один из входов кот чзого (второй вход блока 10 сравнения) блок 12 управления подключается напряжение, пропорциональное уста новленному пределу скорости транспортны средств, а на вход дифференциального усилителя, т.е. на третий вход блока 1О сравнения подается напряжение с блока 7 прямого преобразования скорости пропорциональное скорости проезжающего транспортного средства. При переезде датчиков 1 и 2 грузовым транспортным средством на вькоде блока 9 распознавания типов транспорта отсутствует сигнал и напряжение, пропер- цисжальное скорости хт узового авгомобис выхода блока 7 преобразования скорости сравнивается с напряжением, соответствующим предельно допустимой (выбранной и установленной оператором в зависимости от конкретных дорожных условий) скорости грузовых транспортных средств. В свою очередь, при переезде датчиков 1 и 2 легковым гранспс тным средством на выходе блока 9 распознавания типов транспорта появляется сигнал (фиг, 2), который в блоке 10 сравнения коммутирует напряжение, соответствующее предельно допустимой скс5)ости легковых транспортных средств. Напряжение с выхода блока 10 сравнения, соответствующее уровню превьпиения разрешенной скорости транспортного средства, поступает на вход блока 11 сравнения И1Дешифрации и подается в нем на один вход линейных компаратфов (количество которых соответствует количеству видов воздействий на участников движения, превьшаюших разре- 1тенную скорость движения). Вторые входы всех компараторов в логическом блоке 11 через блок 12 управления подключены к разным источникам опорных напряUona - on, жений так, что Uf- и т.д. - опорное напряжение соответственно для 1-го, 2-го и т.д. KOMnapaTqpoB, дешифрации, находящаяся в блоке 11 сравнения и дешифрации, осуществляет деши(|рацию логических уровней, поступающих с выходов компараторов, и вьфабатывает управляющий сигнал возд ствия в блоке фиксации инф рмадионное предупреждение, фотографирование нарушителя и т.п. Введение в устрсАство блока 9 распознавания типов, преобразователя 6 интервала времени, преобразования скорости, блока 1О сравнения, блока 11 сравнения и дешифрации и блока 12 управления повышает функци жальные возможности устройства. Эффективность предлагаемого устройства состоит в том, что скорость транспортных средств огноситвпьно Просто схемо- технически преобразуется в прямо пропорциональную величину напряжения, что обеспечивает прсикесс дальнейшей обработки, а также фиксацию реальней скорости. Формула изобретения Устрс ство для фиксации Превьоиения Разрешенной скоросги. движения, содержащее два ввдуктвввых датчика, соединенных с шэследовагелыю включенными частотными преофазователем, блоком формирователей импульсов и блоком переключения, и блок фиксации, отли чающееся тем, что, с целью расширения функцисжальных возможнбстей устрсЛстВа, в него введены блок распознавания типа транспорта, блок сравнения, блок сравнения и дешифрации.
блок управпенвя, блок ТфеобразованЕя скоросте, блок прео азованйя интервала времена, аыход блока переключенвя через блок преобразованвя скорости соедийев с первым входом блока фкксаквв а с первым входом блока сравнения, вход которого через блок определения типагранопорта соединен с выходом частотнсяо 1ферфазователя, третий вход блока сравнения соединен с первым выходом блока управления, второй выход котфсхго подключен к первому входу блока сравнения и дешифрации второй вход которого соединен с выходсии; блбка сравнения, третий вход блока сравнения и дешифрации coeДJп eн с выходом блока определения типа 1ранопорга, а выход блока сравнения.и деши | радии соединен со вторым входом блока фиксации
Источники информации, принятые во внимание при экспертизе
1,Патент Франции № 2096437, кл. G 08 Q. 1/00, 1972.
2.Патент Франции № 2202480, кл. Gt 08 Q 1/ОО, 1974 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля параметров транспортных потоков | 1984 |
|
SU1226511A1 |
| Устройство для учета транспортных средств | 1980 |
|
SU902049A2 |
| Устройство для контроля остановки транспортного средства | 1988 |
|
SU1541654A1 |
| СИСТЕМА МОНИТОРИНГА СОСТОЯНИЯ ДОРОГИ, КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ДВИЖЕНИЕМ И СПОСОБ ФУНКЦИОНИРОВАНИЯ ЭТОЙ СИСТЕМЫ | 2019 |
|
RU2733061C1 |
| Устройство для определения типа транспортных средств | 1979 |
|
SU858064A1 |
| Устройство для подсчета автомобилей | 1978 |
|
SU725075A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2021 |
|
RU2761960C1 |
| СИСТЕМА ЗАЩИТЫ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДОВ | 2013 |
|
RU2565159C2 |
| Устройство для регистрации и контроля параметров движения транспортных средств | 1988 |
|
SU1532351A2 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ЗАБЛАГОВРЕМЕННОГО ОПОВЕЩЕНИЯ О ЗАКРЫТИИ (СВОБОДНОСТИ) ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2014 |
|
RU2602517C2 |
П
Ш
Фиг. 1
