(54) УСТРОЙСТВО ДЛЯ УЧЕТА ТРАНСПОРТНЫХ СРЕДСТВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета транспортных средств | 1976 |
|
SU572831A1 |
| Устройство для определения типа транспортных средств | 1979 |
|
SU858064A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИИ СТРУКТУРЫ И ИНТЕНСИВНОСТИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2490718C1 |
| Способ измерения скорости движения транспортных средств и устройство для его осуществления | 1988 |
|
SU1697274A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Магнитометрический детектор транспорта | 1988 |
|
SU1608731A1 |
| Устройство для обеспечения безопасной дистанции | 1983 |
|
SU1126996A1 |
| Устройство для контроля остановки транспортного средства | 1988 |
|
SU1541654A1 |
| Устройство для контроля и регулирования движения транспортных средств | 1987 |
|
SU1499390A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
1
Изобретение относится к контролю параметров транспортных средств с целью учета или регулирования движения и может быть использовано для разделения и фиксации разных классов транспортных средств (.ТС) .
По основному авт.св. № 572831 известно устройство для учета транспортных средств, содержащее датчики, выполненные в виде индуктивной петли, приемники, формирователи импульсов, преобразователь скорости, преобразователь длительности импульса, элемент сравнения, пороговый, элемент, амплитудный дискриминатор, логический блок и блок регистрации tl .
В известном устройстве осуществляется определение типа ТС по нескольким, параметрам аналогового сигнала индуктивного транспортного детектора при переезде через индуктивный датчик ТС. Это устройство позволяет разделить множество ТС на четыре типа. Однако для эффективного управления транспортными потоками по критерию минимизации дорожно-ч транспортных происшествий в различных дорожных условиях, когда при выборе управляющих воздействий необходима информация о технических характеристиках движущихся ТС (максимальные скоростные характеристики, тормозные пути, маневрированность
10 и т.п.) , а также для оперативного контроля и надзора за ТС, такое разделение не удовлетворяет.
Цель изобретения - расширение .. функциональных возможностей.
15
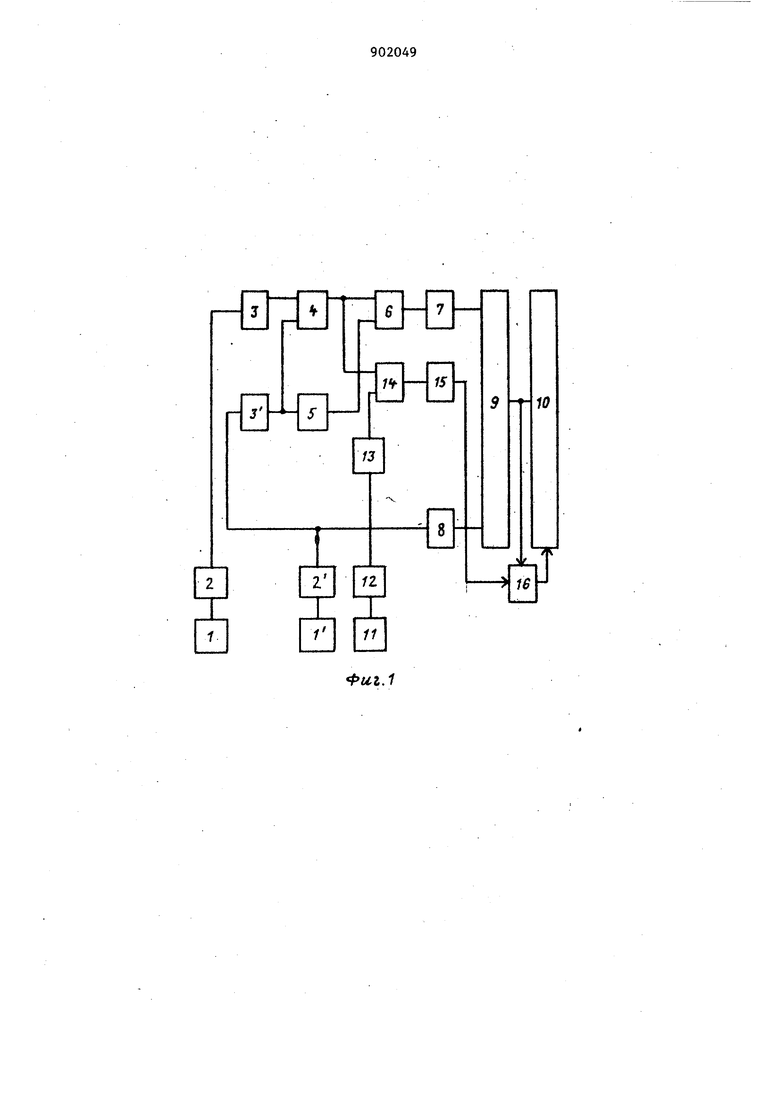
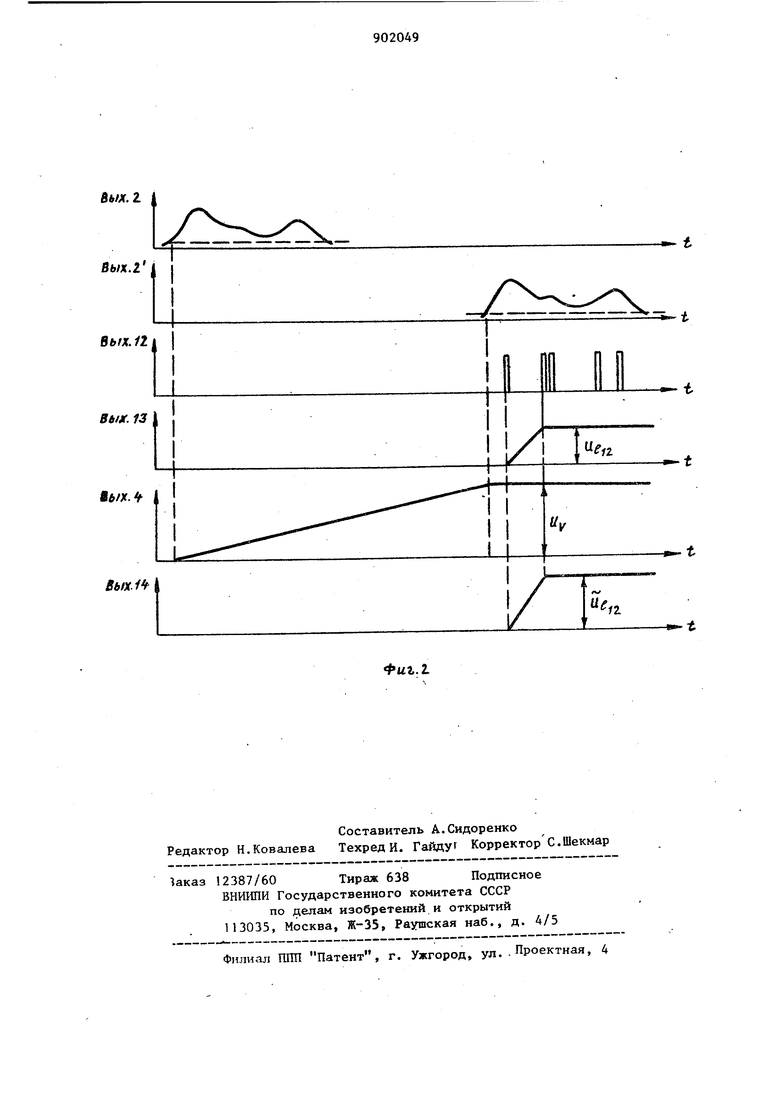
Поставленная цель достигается за счет того, что в устройство для учета транспортных средств введены блок сравнения, блок компараторов, блок деления, формирователь временных ин20тервалов, детектор наличия осей и датчик наличия осей, который соединен через детектор наличия осей и формирователь временных интервалов 39 с первым входом блока деления, выход преобразователя скоростей соединен со вторым входом блока деления, выход которого соединен со.входом блока компараторов, выход которого соединен с первым входом блока сравнения, выход логического блока соединен со вторым входом блока сравнения, выход которого соединен со вторым входом блока регистрации. На фиг.1 приведена структурная схема предлагаемого устройства для учета транспортных средств; на фиг.2 диаграмма работы устройства. Устоойство для учета транспортньгх средств содержит датчики 1 и 1 , выполненные в виде индуктивной петли подключенные к входам двух чувствительных приемников 2 и 2 , причем выход приемника 2 через формирователь 3 импульсов подключен к одному из входов преобразователя 4 скорости а выход приемника 2 через формирователь 3 импульсов к второму входу преобразователя 4 скорости и входу преобразователя длительности импульса 5, выход которого подключен к первому входу элемента 6 сравнения, выход преобразователя 4 скорости соединен с вторым входом элемента 6 сравнения, выход которого соединен с входом порогового элемента 7, а амплитудный дискриминатор 8 включен между выходом приемника 2 и первым входом логического блока 9, второй вход которого соединен с выходом порогового элемента 7, а выход соединен с входом блока 10 регистрации, в свою очередь, датчик 11 наличия осей через последовательно включенные детектор 12 наличия осей и формирователь 13 временных интервало соединен с первым входом блока 14 деления, второй вход которого соединен с выходом преобразователя 4 скорости, а выход через блок 15 компараторов соединен с первым входом блока 16 сравнения, второй вход которого соединен с выходом логического блока 9, а выход соединен с вторым входом блока 10 регистрации. Устройство работает следующим образом. При прохождении ТС над индуктивными петлями 1 И l нз feняeтcя их индуктивность. Как известно, степень изменения индукпли зависит от размеров и типа ТС, а также от расстояния между шасси н петляв. Изменение 9 индуктивности петель соответственно вызывает изменение частоты чувствительных приемников 2 и 2 , и на их выходах получается импульс, форма которого зависит от вышеупомянутых факторов, а также от скорости ТС. Сопоставляя, с учётом скорости ТС, длительность и амплитуду аналогового сигнала, пред авляется возможным множество их технических характеристик разделить на следующие типы: легковые, грузовые, автобусы, грузовые с прицепом или полуприцепом. При прохождении ТС над датчиком 11 наличия осей, на выходе детектора 12 наличия осей появляются определенное количество импульсов, количество которых соответствует количеству осей проезжающего ТС (фиг.2, вых.12). Так как наиболее инЛоомативным параметром относительно марки ТС является расстояние между первыми двумя осями т.е. в общем случае, при 3-5 осевых тс), в то в формирователе 13временных интервалов сперва из серии импульсов, поступающих с выхода детектора 12 наличия осей выделяются первые два импульса, и далее осуществляется преобразование промежутка времени между этими импульсами в пропорциональное напряжение U и (фиг. 2, . 13). В свою очередь, на выходе преобразователя 4 скорости появляется напряжение Uy , обратно пропорциональное скорости ТС, т.е. прямо пропорциональное промежутку времени, в течение которого ТС преодолевает расстояние между индуктивными датчиками 1 и 1 (фиг.2, вых.4/ и подается на один из входов блока 14деления. Второй вход блока 14 деления соединен с выходом формирователя 13 временных интервалов, Б блоке 14 деления осуществляется операция аналогового деления. Таким образом, напряжение на выходе блока 14 деления, в определенном масштабе, пропорционально расстоянию мевду первыми двумя осями (или между осями двух осевых ТС) проезжающего TCt Напряжение с выхода блока 14 деления подается на блок 15 компараторов, в котором осуществляется классификация ТС по расстоянию между осями независимо от их типа, т.е. в блоке 15 компараторов сравнивается напряжение, поступающее с блока 14 деления, с множеством пороговых значении напряжения, отвечающим опре-. деленным расстояниям между осями. Сигнал появляется на том выходе из множества выходов в блоке 15 компараторов , где поступающее напряжение с блока 14 деления соответствует установленному пороговому значению. Однако одно и то же расстояние между осями (с учетом погрешности измерения) может иметь ТС.разных типов,, тем самым выделение определенной марки ТС только по расстоянию между 6с:ями невозможно. Дальнейшее разделение ТС осуществляется в блоке 16 сравнения, входы которого соединены с выходом блока 5 компараторов и выходом логического блока 9, и который содержит множество схем совпадения, на одни входы которых поступает сигнал о наличии определенного типа ТС (с выхода логического блока 9), а на вторые входы сигнал определенного расстояния межд осями. Выход блока 16 сравнения соединен со вторым входом блока Ю регист эации. Схемотехнически датчик 11 наличи Осей выполнен в виде пневматической трубы, контактного датчика или, например, емкостного датчика, представляющий собой две или более металлических пластинки с шириной от 3 до 10 см и длиной, соответствующей полосе движения, между которыми находится эластичный диэлектрик,например резина.Емкостной датчик с пооводами соединён с детектором I2 наличия осей,который схемотехнически выполнен аналогично приемникам 2 и 2 , с тойразницей, что при проезде ТС через индуктивные петли 1 и меняется их индуктивность на некоторую величину, тем самым изменяется, например, частота генератора в прием никах 2 и 2 , а при проезде ТС через емкостной датчик 11 меняется его емкость. Эти изменения также вызывают изменения частоты генератора в детекторе 12 наличия осей. Эти изменения частоты преобразовываются в аналоговый сигнал одним из известных методов и нормируются поамплитуде и длительности (также с одним из известных методов) и подаются на вход формирователя 13 временных интервалов (фиг.2, вых. 12). 96 Введение в схему датчика I I наличия осей,детектора 12 наличия, формирователя 13 временных интервалов, блока 14 деления, блока 15 компараторов и блока 1б сравнения расширя- . ет функциональные возможности устройства. На базе разделения множеств ТС на непересекающиеся подмножества и вероятностном характере измерения расстояния между осями ij. 5 см) определена условная уничтоженная энтропия Н(Т/х) множества классов Т транспортных средств. Так, использованием информативных признаков максимальная амплитуда сигнала и его длительность - Н (Т/Ау,, ty) 2,297 бит, а использованием дополнительного параметра - расстояние между осями - Н(Т/Л„, ty, l) 4,135 бит. Предлагаемое устройство для учета транспортных средств применяется для рещения задач управления транспортными потоками и прогнозирования оптимальных управляющих воздействий, с целью минимизации дорожно-транспортных происществий. Формула изобретения Устройство для учета транспортных средств по авт.св. № 572831, о т л ичающееся тем, что, с целью расширения функциональных возможностей, в него введены блок сравнения, блок компараторов, блок деления, фор1 ирователь временных интервалов, детектор наличия осей и датчик напичия осей,который соединен через детектор наличия осей и формирователь временных интервалов с первым входом блока деления, выход преобразователя скоростей соединен.со вторым входом блока деления, выход которого соединен со входом блока компараторов, выход которого соединен с первым входом блока сравнения, выход логического блока соединен со вторым входом блока сравнения, выход которого соединен со вторым входом блока регистрации. Источники информации, принятые во внимание при экспертизе 1. Авторское свидет5льство СССР № 572831, кл. G 08 G 1/015, 1976.
Фиг.1
Bbtx. г
Вых. 2
Вых. 11
ВЫЖ. 13
Лых. if
Bbix.if
Фиг.I
