1
Изобретение относится к контролю параметров транспортных средств с целью уста или регулирования движения и, в частности, может быть использовано для разделения и фиксации типов транспортных средств.
Известны устроПства для разделения типов транспортных средств, позволяющие множество всех транспортных средств разделить по их длине .
Однако для решения задач регулирования и управления такое разделение по длине недостаточно. При управлении транспортными потоками с целью преимущественного права проезда определенного типа транспортных средств (например, автоС5усов, легковых автомашин и т.п.) при прогнозировании транспортных потоков и дорожных сооружений, а также других задач, связанных с транспортными средствами, требуется раздельный подсчет транспортных средств определенных типов - легковых, грузовых автобусов, грузовых с прицепом или полуприцепом.
Наиболее близким по технической сущности к предлагаемому является устройство для учета транспортных средств. Это устройство содержит датчики, выполненные в виде индуктивных петель,приемники,формирователи импульсов, преобразователь скорости, преобразователь длительности импульса элемент сравнения, пороговый элемент, амплитудный дискриминатор, логический блок и блок регистрации 2.
Недостатком данного устройства является большой объем аппаратуры,
10 ибо входная часть устройства выполнена по двухканальному принципу, т.е. в ней содержится два .индуктивных петлевых датчика, и соответственно, два приемника сигналов (детектора
15 транспортных средств). Все это приводит к понижению надежности функционирования устройства, и одновременно повышает затраты на изготовление и установку устройства на объекте, ибо
20 каждый индуктивный петлевой датчик закладывается в полотно дороги.
Цель изобретения - повышение надежности устройства путем разделения транспортных средств на несколько
2S типов с использованием тй.г;ько одного индуктивного датчика.
Указанная цель достигается введением в предлагаемом устройстве элемента задержки и последовательно
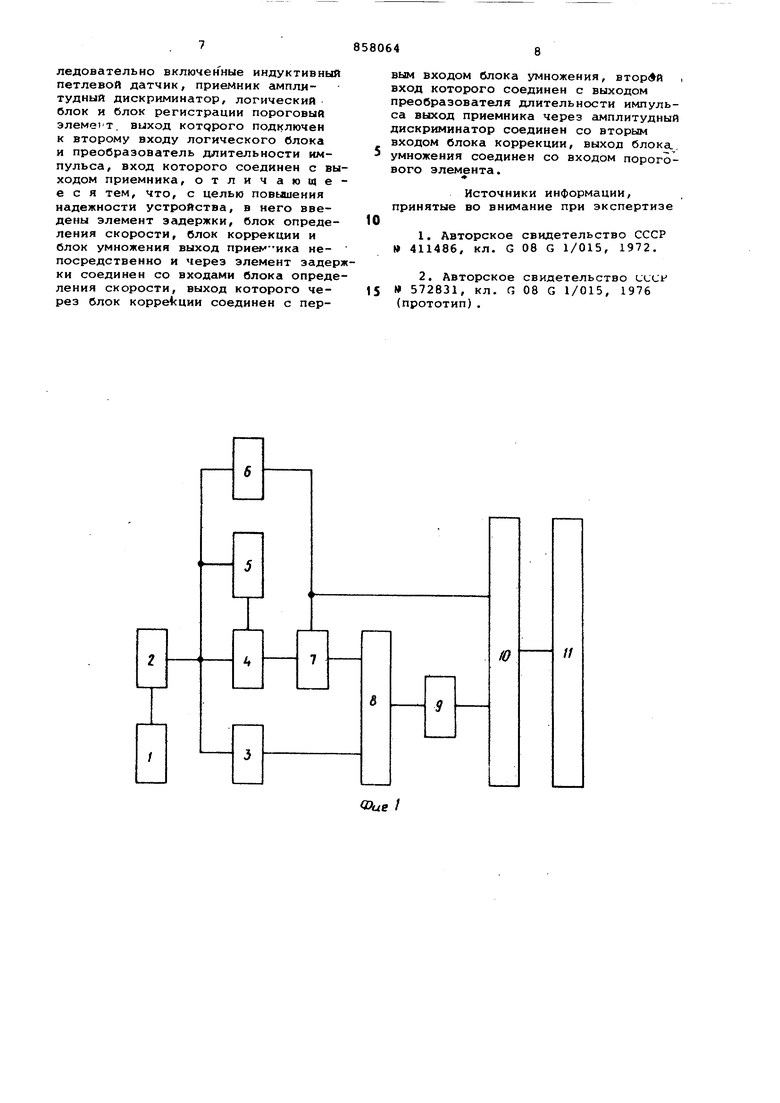
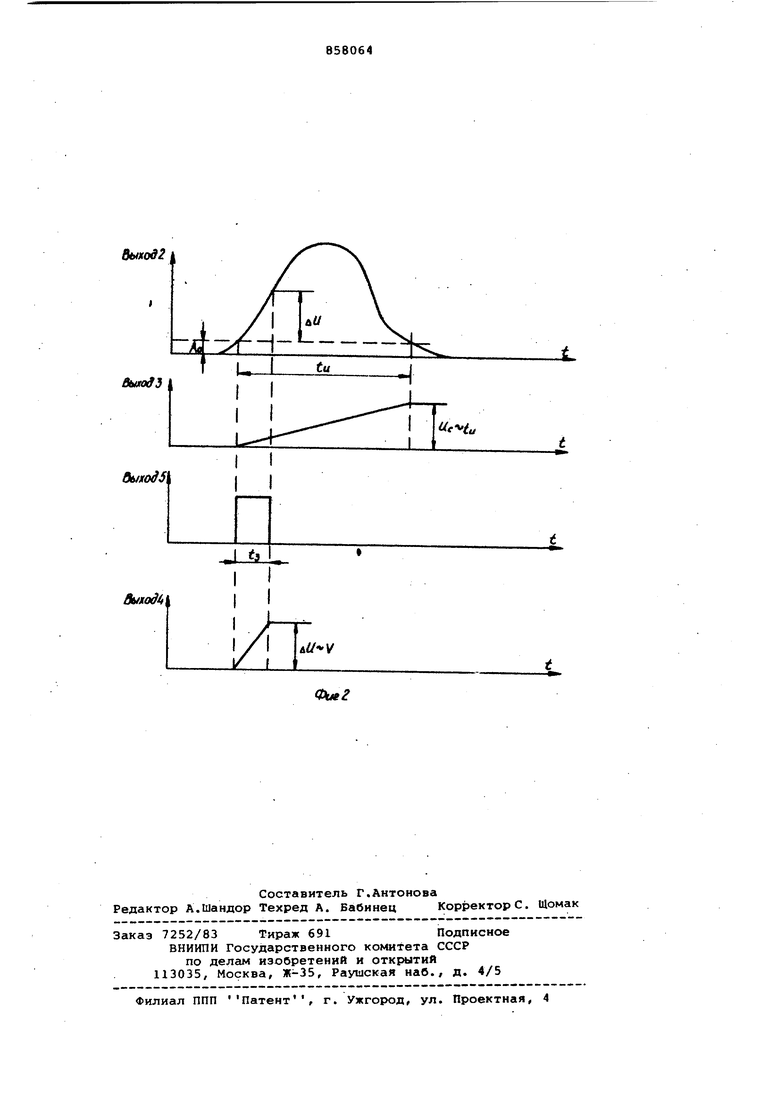
30 включенных блока определения скорости блока коррекции и блока умножения, выход приемника непосредственно и через элемент задержки соединен со входами блока определения скорости, выхог которого через блок коррекции соединен с первым входом блока умно жения, второй вход которого соедине с выходом преобразователя длительность .импульса выход приемника чере амплитудный дискриминатор соединен со вторым входом блока коррекции выход блока умножения соединен со входом порогового элемента. На фиг.1 приведена структурная схема предлагаемого устройства на фиг.2 эпюры напряжений на выходах основных блоков устройства. Устройство содержит индуктивный петлевой датчик 1, приемник 2, преобразователь 3 длительности импульса, блок 4 определения скорости, эл мент задержки 5, амплитудный дискри минатор б блок 7 коррекции, блок 8 умножения, пороговый элемент 9 логи ческий блок 10, блок 11 регистрации Устройство работает следующим об разом. При прохождении транспортного средства над индуктивным петлевым датчиком 1 происходит изменение эле тромагнитного поля, возникающего во руг датчика 1, что приводит к изменению индуктивности петлевого датчика 1. Степень изменения индуктивности датчика зависит от размеров и типа транспортного средства, а также от расстояния между шасси и датчиком. Изменение индуктивности петли датчика соответственно вызывает изменение частоты чувствительности приемника 2 и на его выходе получается импульс напряжения (фиг, форма которого зависит от вышеупомя нутых факторов, и также от скорости транспортных средств. Полученный км пульс характеризует определенный тип транспортного средства и по параметрам этого импульса, т.е. по значению амплитуды и длительности, с учетом скорости движения транспортного сред ства, представляется возможным разделение всех транспортных средств на четыре типа. По амплитудному значению аналогового импульса на выходе приемника 2 амплитудный дискриминатор б подразделяет транспортные средства к одном из двух подмножеств E- «JN-A.i ,A,V -подмножество легковых авто машин и автобусов; -подмножество грузовых и гру вьгх с прицепом или полуприцепом;а, - транспортное средство, пере езжающее индуктивный датчик 1 ; А, - амплитудное значение анало гового импульса; А - пороговое значение амплитуды. Так как в пределах каждого подмножества Е и F информативным параметром является также длина транспортного средства то одновременно с разделением по амплитуде, т.е. расстояния между шасси автомобилей и индуктивным датчиком, осуществляется и разделение транспортных средств по их длине, причем длина определяется по длительности аналогового импульса на выходе приемника 2, с учетом скорости транспортного средства. Это осуществляется следующим образом. В преобразователе длительности импульса 3 осуществляется преобразование время - амплитуда напряжения, т.е. в течение промежутка времени с постоянным током заряжается емкость до величины напряжения (фиг. 2) которое подается на один вход блока 8 умножения. Таким образом напряжение Up на выходе преобразователя 3 длительности импульса пропорционально длительности аналогового сигнала t. Как известно, длительность сих- нала t.. выражается : де D - длина транспортного средства ; 6 - длина контура индуктивного петлевого датчика 1 (отсчитывается вдоль оси дороги); V - скорость транспортного средства. В свою очередь, скорость трансортного средства пропорциональна корости нарастания переднего фронта налогового сигнала на выходе приемика 2, которую при постоянном для сех транспортных средств времени иксации (фиг.2) можно выразить слеующим образом -(NiuUKiCOHst При достижении аналоговым сигналом аданного порогового уровня А, на ремя t запускается элемент заержки 5 (фиг.2). в течении этого ремени аналоговый сигнал нарастает а величину ди (при этомлисл у) . та величина напряжения фиксируется запоминается блоком 4 определения корости (фиг.2) с выхода которого одается на блок 7 коррекции. Блоом 7 коррекции осуществляется опеация нормировки значения скорости, .е. напряжения, поступающего на его вход, согласно сигналу, поступающег на его второй вход от амплитудного дискриминатора б, Амплитуда аналого вых импульсов на выходе приемника 2 зависит от типа транспортного средства, переезжающего датчика 1, и в среднем для вышеупомянутых двух под множеств транспортных средств Е и F отличается 1,5 раза. Следовательно так же отличается крутизна переднего фронта аналогового импульса и,соответственно скорость транспортного средства для подмножеств Е и F, кот рая определена по параметрам перед,него фронта аналоговых импульсов. Выравнивание этой неоднозначности и отличия сигналов (нормировка) осуществляется в блоке 7 коррекции путем изменения коэффициента передачи соответствующего усилителя в зависи мости от того, аналоговый сигнал пр надлежит подмножеству Е или F. Откорректированное значение напр жения лик которое пропорционально скорости V транспортного средства, с выхода блока 7 поступает на один вход блока 8 умножения, на второй вход которого поступает напряжение и., с выхода блока 3, которое пропор ционально длительности аналогового сигнала t, В блоке 8 выполняется операция умножения сигналов AU,(.Uc одним из известных методов, в результате которой на выходе блока 8 получает величину напряжения, пропо циональную длине транспортного сред ства . Это напряжение с выхода блока 8 умножения поступает на вход порогового элемента 9, который все трамспортные средства разделяет в зависи мости от их длины на два подмножест ва ,9 где Q - подмножество легковых и гру зовых автомобилей; подмножество автобусов и грузовых с прицепом или полуприцепом ; порог по длине транспортн ого средст в а; напряжение на выходе блока умножения. Сигналы с выходов амплитудного дискриминатора 6 и порогового элемента 9 поступают на входы логического блока 10, состоящего из схем, совпадения. В зависимости от уровня этих сигналов, т.е. от положений амплитудного дискриминатора б и поро гового элемента 9 срабатывает один из элементов И в логическом блоке 10. Таким образом, логическим блоком 10 оп1)еделяется взаимное попарное пересечение подмножеств j Е SjQ R { ) тем самым выявляется тип транспортного средства, пересекаюп(его датчик 1. Выход логического блока ).0 подключен к входу блока 11 регистрации, где осуществляется соответствующая регистрация типа транспортного средства либо на световом табло, либо на перфоленте или каким-то запоминаюлдим элементом. Схематическая реализация предлагаемого устройства может быть выполнена, например, следующим образом. Приемник 2 представляет собой генератор самовозбуждения, в колебательный контур которого включена индуктивная петля датчика 1. С помощью частотно зависимой схемы колебания генератора преобразуются в напряжение. Блок 4 определения скорости построен на трех операционных усилителях по схеме фиксации и запоминания заданного уровня напряжения с вычетом определенного начального уровня. Преобразователь длительности импульса 3 включает генератор постоянного тока, который через управляемый ключ заряжает емкость. Элемент задержки 5 выполнен, например, по схеме одновибратора. В качестве амплитудного дискриминатора 6 может быть использован компаратор напряжения с управляемым уровнем срабатывания. Блок 7 коррекции представляет операционный усилитель с изменяе -1ым (электрически) коэффициентом передачи, а блок 8 умножения может быть выполнен, например, на интегральной микросхеме балансного модулятора. Пороговый элемент 9 может быть построен по схеме триггера Шмидта с фиксированным уровнем срабатывания, а логический блок 10 построен полностью на интегральных логических микросхемах. Введение в устройстве элемента задержки 5, блока 4 определения скорости, блока 7 коррекции и блока 8 умножения упрощает устройство оп,ределения типа транспортного средства. Эффективность данного устройства состоит в том, что представляется возможным с использованием одного индуктивного датчика определить тип транспортного средства, при этом относительно простым рхемоуехническим решением. Это позволяет использовать данное предложение в автоматизированных системах управления транспортными потоками на магистралях, а также для получения статистических данных о распределении транспортных средств по типам на дороге. Формула изобретения Устройство для определения типа транспортных средств содержащее последовательно включенные индуктнвнЕлЯ петлевой датчик, приемник амплитудный дискриминатор, логический елок и блок регистрации пороговый элеме1Т. выход котррого подключен к второму входу логического блока и преобразователь длительности импульса, вход которого соединен с выходом приемника, отличающееся тем, что, с целью повышения надежности устройства, в него введены элемент задержки, блок определения скорости, блок коррекции и блок умножения выход прием ика непосредственно и через элемент задержки соединен со входами блока определения скорости, выход которого через блок корре4 ции соединен с первым входом блока умножения, вторАй вход которого соединен с выходом преобразователя длительности импульса выход приемника через амплитудный дискриминатор соединен со вторым входом блока коррекции, выход блока., умножения соединен со входом порогового элемента. «
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР 4И486, кл. G 08 G 1/015, 1972.
2. Авторское свидетельство ucCf 15 572831, кл. г, 08 G 1/015, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета транспортных средств | 1976 |
|
SU572831A1 |
| Устройство для учета транспортных средств | 1980 |
|
SU902049A2 |
| Устройство для измерения скорости движения автомобиля | 1979 |
|
SU775698A2 |
| Устройство для фиксации превышенияРАзРЕшЕННОй СКОРОСТи дВижЕНия | 1979 |
|
SU849275A1 |
| Устройство для определения занятости дорог | 1980 |
|
SU886035A1 |
| ФОТОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ РАЗМЕРОВ И КОНЦЕНТРАЦИИ ВЗВЕШЕННЫХ ЧАСТИЦ | 2012 |
|
RU2508533C2 |
| УСТРОЙСТВО ТАЙМИРОВАНИЯ СПЕКТРОМЕТРИЧЕСКИХ ИМПУЛЬСОВ | 1995 |
|
RU2098842C1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Устройство для определения скорости движения транспортных средств | 1980 |
|
SU980117A2 |
| ОДНОФОТОННЫЙ ПРИЕМНИК ДЛЯ ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ПОИСКА ОПТИЧЕСКИХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2014 |
|
RU2568939C2 |
//
«)
ВыюдЗ
Оымд
