Предлагается интегратор, предназначенный для получения интеграла S xdt в виде электрической величины, где х также задается в В№
де некоторой электрической величины, }|апример, напряжения.
Интегратор представляет собою следящую систему с тах-огенератором, находящимся на одном валу с двухфазным асинхронным двигателем, обмотка управления которого включена на выход электронного УСилителя.
От известных интеграторов предлагаемый интегратор от;1ич.ае1Хя тем, что электронный усилитель управляется от фазового моста, в свою очередь управляемого контактом нульиндикатора. Так как нульиндикатор включен таким образом, что среднее положение контакта соответствует равенству входного напряжения и напряжения тахогенератора, то угол поворота асинхронного двигателя будет пропорционален интегл ралу напряжения на входе.
Преимуществом описываемого интегратора перед известными ицтеграторами, выполненными в виде следящей системы с усилителем, двигателем и тахогенератором, является упрощение схемы.
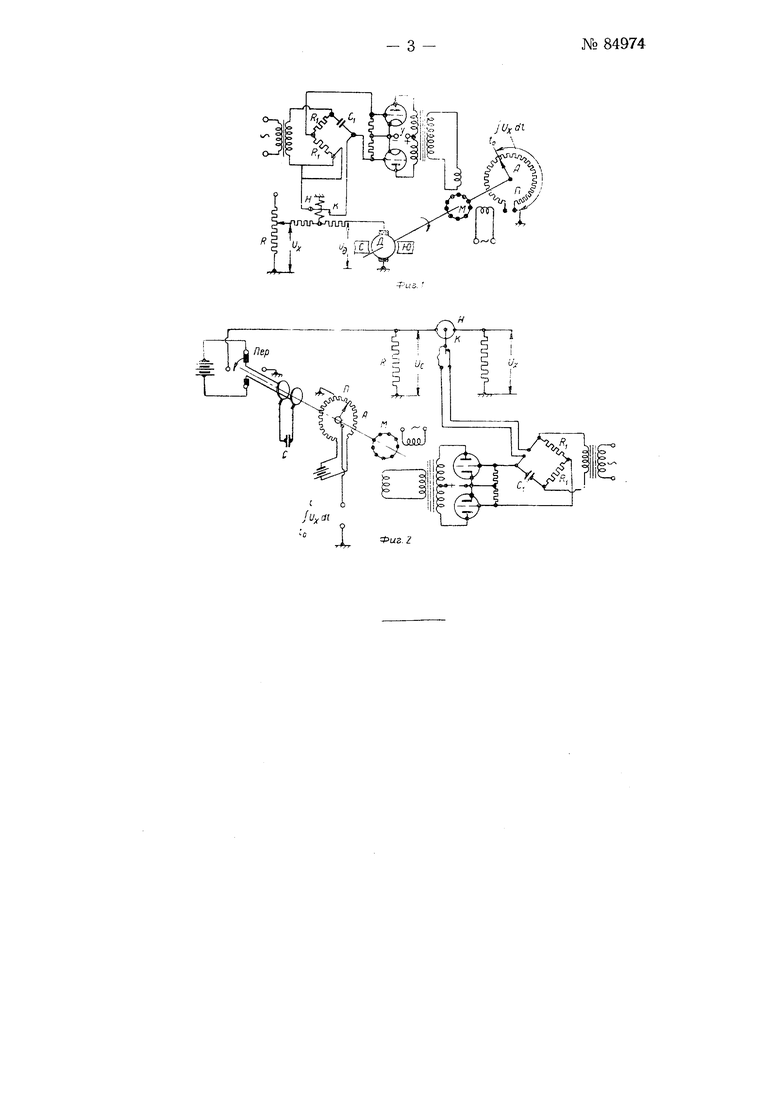
Па фиг. 1 изображена принципиальная схема интегратора; на фиг. 2 - вариант принципиальной схемы с применением емкостного тахометрического устройства.
Напряжение С/ д., пропорциональное величине х, снимается с потенциометра R и включается навстречу напряжению (/ , генерируемому тахогенератором Д через нульиндикатор Н, выполненный в виде магнитоэлектрической системы.
Тахогенератор Д ( с постоянным магнитом С-Ю) приводится во вращение двухфазным асинхронным двигателем М с короткозамкнутым ротором. Одна из обмоток двигателя приключена к сети, а другая- к выходу усилителя У. Папряжение на выходе усилителя У регулируется П13И помощи фазового моста, составленного из двух равных сопротивлений R и конденсатора С,. В одном плече фазового моста находится контакт К, управляемый нульиндикатором Я. При замкнутых
84974- 2 KoirraKiax Д1зигате,чь М врашает ся а таком н птаанлсиии, что иульинди«атор стремит:я разомкнуть «oi-ггакт К. Разомкнутым контактам соответствует врашеиме двигателя в Противоположном направлении.
Так как напряжение, генерируемое тахогенератором Д, пропорциоиа.тьно скорости вращения и среднее положение контакта /С соответствует равенству напряжений 6,- и С/,,, то скорость вращения тахогенератора Д будет с больн.1ой точностью нропорциона,льна 6..
Следовательно, угол поворота оси двнгате,:гя УИ и связанного с нейдвижка Л потенциометра /7 пронорционален jL/j-f/f . Напряжение, снимаемое с потенциометра Я, нропорциональное перемещению движка /1.
пропорционально искомому значению | ( yidi.
В Видо изменнок схеме (фиг. 2) вместо обыч.иого тахогенератора применяется тахометрическое уст;)ойство, основанное на заряде конденсатора. Как видно из фиг, 2, заряд и разряд конденсатора С осуществляется переключением коитакт(л-5 переключателя /7ер, сндяп1,е1( :на ва-лу двигателя Л1 Если период Т за)яда н разряда конденсато;)а велик по с-;:авлению с постоянной 1 ремени контура RC, то среднее зи; ченне силы тока через сопротивление / будет пропорционально скоро ста вращекия переключателя Пер в пределах из-мсневия скорости, для которых справедливо Г ,; RC. Поэтому среднее значение нап)яжеиия и,. будет пропордиоиа.льн0 скорости врап1сння двигателя М При изменении направления вращения двигателя М -13мепится, как нетрудно видеть, и полярность капряжеиня (/,. .
В остальном устройство, иЗОбраженное на фиг. У, идешично устройству, нзображсигюму на фиг. 1.
Пред .м е т н з о б р е i е н и я
1.Интегратор для получения величины интеграла на|П1)яженпя, и.зikeияюш.eгocя во времени, вынолнеиный в виде сле..дяп1,ей системы с усилителем, двигателем и тахогенератором, отличающийся тем. Что, с целью упрощения следя-н1ей системы, в ней применен фазовьп iliocr, управляемый контактом ну.льиндикатора.
2.Видоизменение интегратора по гт. 1, отличающееся тем, что н качестве тахогенератора иснользовано тахометрическое устройство, . котором кондеисатор периодически заряжается от ислочника иостоянйого тока и разряжается на соп)отивление посредством нереключателя, ось )го связа)1а с 1за..том двухфазного двигателя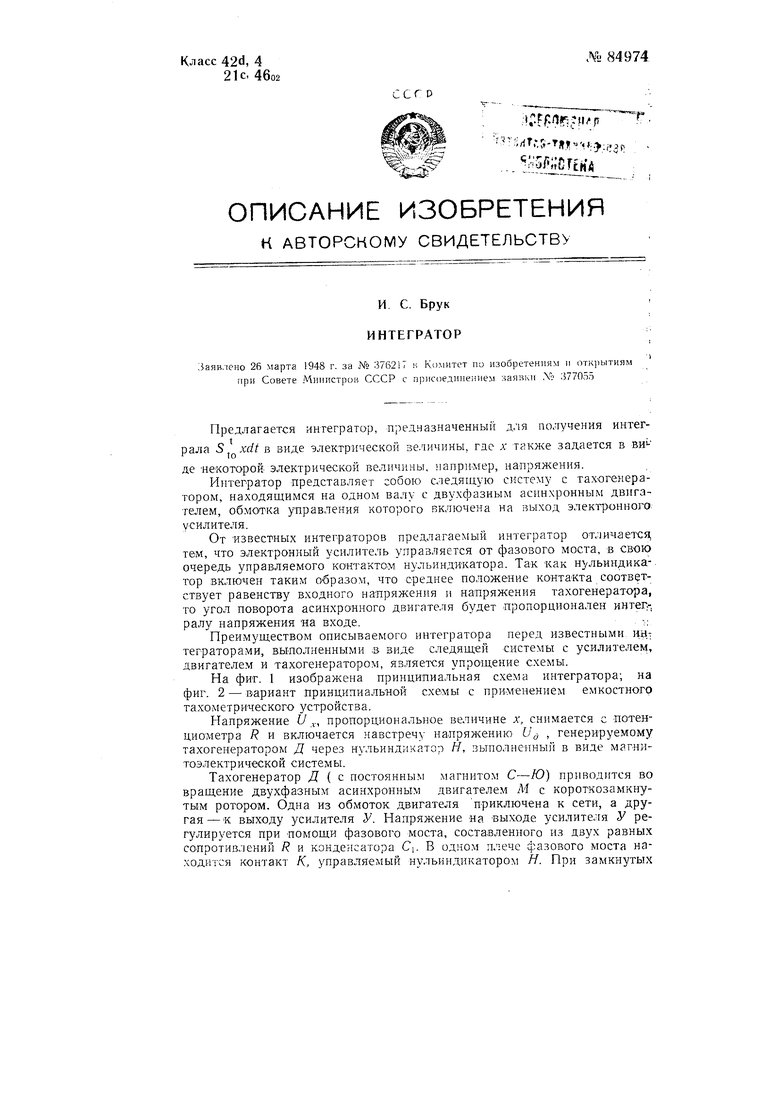
| название | год | авторы | номер документа |
|---|---|---|---|
| Однопроводная силовая синхронная передача | 1948 |
|
SU83673A1 |
| Электроинтегратор | 1948 |
|
SU79209A1 |
| Электрический множитель и делитель | 1948 |
|
SU83449A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Способ осуществления функциональных зависимостей различного вида | 1948 |
|
SU80717A1 |
| Устройство для управления электроприводом постоянного тока | 1959 |
|
SU122516A1 |
| Потенциометрическое устройство для решения алгебраических уравнений | 1948 |
|
SU83582A1 |
| Электрогидравлический регулятор гидротурбины | 1967 |
|
SU363381A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ПЕРЕМЕЩЕНИЯ ЭЛЕКТРОДОВ ДУГОВЫХ СТАЛЕПЛАВИЛЬНЫХ ПЕЧЕЙ | 1965 |
|
SU169713A1 |