(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЛИСТОВЫХ МАТЕРИАЛОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения листа от стопы | 1986 |
|
SU1524958A1 |
| Клещевой захват | 1977 |
|
SU703467A1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ЗАГОТОВКИ ОТ СТОПЫ И ПОДАЧИ К ОБРАБАТЫВАЮЩЕЙ МАШИНЕ | 1993 |
|
RU2086336C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1983 |
|
SU1125082A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Устройство для отделения верхнеголиСТА OT СТОпы и пОдАчи ЕгО КпРЕССу | 1979 |
|
SU804114A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| Устройство кривовязюка для подачи полосового и ленточного материала в рабочую зону пресса | 1980 |
|
SU869920A1 |
| СТЕНД ДЛЯ СБОРКИ И СВАРКИ РАМЫ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2017 |
|
RU2680114C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |


Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для захвата листовых материа лов, уложенных, в стопку. Известно захватное устройство для ли товых материалов, содержащее несущую балку, на которой установлены с возможностью перемещения поперечные планки с закрепленными на них захватными органами и снабженными контактным и пружинными приводами ij. Однако это устройство предназначено лишь для захвата листов, имеющих волнистую форму, например шифера. Наиболее бдизким к изобретению по те нической сущности является захватное устройство для листовых материалов, сод жащее несущую раму и установленные на ней торцевые прижимы,один из которых снабжен силовым приводом 2j. Недостатком этого устройства является то, что оно недостаточно надежно в работе, так как удерживает груз только аа счет сил трения, п также узкая сфера его применения, поскольку оно предназначено только для плоских листов. Цель изобретения - повышение надежности и расширение сферы применения путем обеспечения захвата изделий различной формы. Поставленная- цель достигается тем, что устройство снабжено дополнительными поддерживакяцими захватными органами, каж. дый из которых выполнен в виде L - образного захватного рычага, установленного на раме с возможностью регулирования наклона в вертикальной плоскости и снабженного шарнирно укрепленной на нем опорой, связанной посредством пальца и копира с приводом. При этом дополнительные захватные органы могут быть подпружинены относительно рамы и снабжены фиксатором, соединенньш с приводом. На фиг. 1 приведено устройство, ойций вид; на фиг. 2 - то же, вид в планке; на фиг. 3 - разрез А - А на фиг. 1; на фиг. 4 - вариант выполнения устройства с подпружиненными захватными органами; на фиг 5 - то же, виц в плане . Устройство (фиг. 1-3) содержит раму 1, на которой установлен привоа 2, л например, пневмоцилинар. Рама 1 состоит на несущей балки 3 в кронштейнов 4, шар нирно соеаиненнык с балкой посредством осей 5 с возможностью регулирования углрв С|( и наклона кронштейнов. На раме закреплены стопоры 6, преаназначенные апя фиксации крсжштейнов в заданном положении. На балке 3 неподвижно закреплена пла ка 7 с отверстиями 8 для крепления устройства на грузоподъемном механнаме, на ример, jia консольном кране или манипуляторе, и торцевой упор 9. Противолежащий ему закватный орган выполнен в виде прижима 1О, связанного с приводом 2 через зубчато - реечную передачу, сое тоящую на двух зубчатых колес 11 и 12 и двух зубчатых реек 13и 14, учетверяюшую ход рейки 14, на которой закрюплеи прижим Ю, относительно хода шт ка привода 2. G прижимом Ю и рейкой 14 неподвижно посредством консолей 15 соединены регулировочные винты 16. На кронштейнах 4 закреплена пара дополнительных захватных органов, выполне ных в виде Ц - образных рычагов 17 и 18, причем у рычага 17 боковая стойка 19 неподвижно свявана с основанием, а у рычага 18 боковая стойка 20 выполнена в виде клина- и подпружинена пружинами 21относйтельвс основания. Рычаги 17 и 18 имеют возм(кность псшорота относительно кронштейнов 4 от привода 2, для чего каждый из них выполнен в виде звена шарнирного параллелограма (фиг. 3) и соединен посредством подвижных звеньев 22 этого параллелогра- ма с неподвижным звеном 23, жестко закрепленным на кронштейне 4. Рычаги 17 и 18 снабжены пальцем 24, который взаимодействует с копиром 25, имеющим паз 26. Копир жестко посредствсй фланца 27 соединен со штоком привода 2. Устройство взаимодействует с листовым материалом 28, уложенным в штабель ил стопу. На фаг. 4 и 5 показан вариант выполнения устройства с подпружиненными дополнительными захватными органами. Это устройство содержит раму 29, выполненную в виде горизонтальной несущей балки. На раме закреплен привод ЗО, торцевой упор 31, а также два фиксатора 32, связанные между собой ТЯГОЙ 33. Привод соединен с торцевым прижимом 34 и толкателем 35г взаимодействующим с тягой 33. Подводные опоры 36 выполнены L - образными. Они шарнирно закреплены на раме 29 посредством осей 37 и подпружинены относительно рамы пружины 38. Устройство работает следующим образом. Уст:ройство, закрепленное на грузо- подьемном механизме, подводят к стопе листового материала 28, в частности, к отвалам плуга, таким образом, чтобы прижим 1О оказался за краем стопы со стороны носка отвала. В это время прижим 10 выдвинут относительно упора 9, рычаги 17 и 18 повернуты за габарит стопы, а пальцы 24 находятся в пазах 26 копиров 25. Наклон рычагов 17 и 18 в вертикальной плоскости отрегулирован посредством поворота кронштейнов 4 на осях 5 таким образом, что рабочие поверхности оснований опор параллельны плоскостям отвала. Устройство опускают на стопу до упора регулировочных винтов 16 в верхний отвал, причем винты 16 предварительно вьюернуты относительно консолей 15 на определенную высоту в зависимости от того, какое количество отвалов необходимо отделить от стопы. При включении привода 2 прижим 10 перемещается навстречу упору 9, сдвигая верхние отвалы (отвал). Одновременно перемещается копир 25, заставляющий палец 24 перемещаться по пазу 26, в результате чего шарнирный параллелограмм, частьй которого является рычаг 17, поворачивается относительно звена 23. При этом подпружиненная стойка 20 рычага 18 поджимает отвалы к стойке 19 и,1чага 17, в результате чего они выравниваются по боковым кр(4кам. Горизонтальные полки рычагов 17 и 18 подд ншвают отделяв {ые отвалы снизу. Поворот рычагов 17 и 18 прекращаемся в момент выхода пальца 24 из паза 26. Прижим 10 продолжает перемещать отвалы доупора их внеподвижный торц&вой упор 9. В это время отделяемые отвалы зажаты с торцев прижимом 10 и упором 9, а снизу и с боков поддериваются рычагами 17 и 18. В таком положении они транспортируются к месу разгрузки. /1ля х;вобожденяя отвалов привод 2 еремещает прижим 10 в обратную стоону, одновременно перемещается копир
25, в результате чего рычаги 17 и 18 возвращаются в искодное положение.
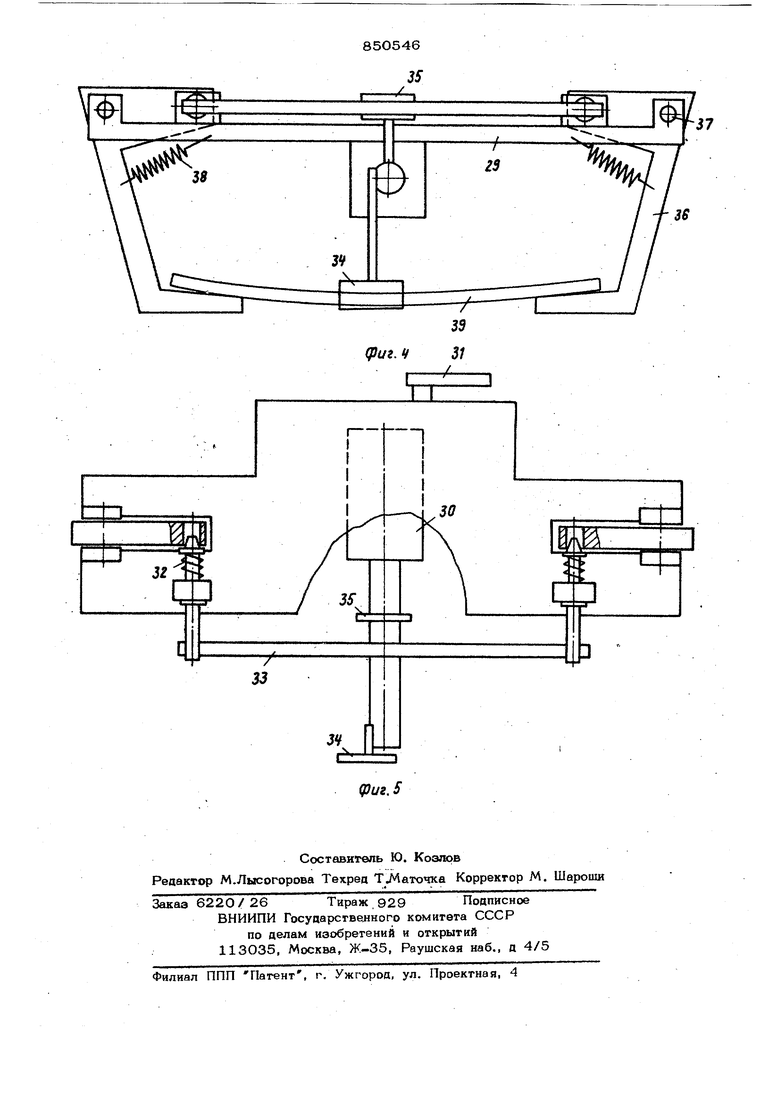
Работа варианта устройства, (фиг. 4 и 5) осуществляется следующим образом..
Перед началом сдвигания листов 39 опоры 36 находятся в сведенном положении под действием пружин 38 и зафиксированы фиксаторами 32. Прижим 34 толкает листы 39 до упора 31, при атом нижний, лист взаимодействует с основаниями опор36.
Для освобождения листов от закват- ных органов привод 30 перемещает прк- жим 34 и толкатель.. 35 в обратную
сторону, при этом последний взаимодействует на тягу 33, а та, в свою очередь, на фиксаторы 32, выводя иж из гнезд, опоры 36 под действиек( массы находящихся на них листов разворачиваются на осях 37, освобожяая листы. Пружина 38 возвращает опоры в исходное положение, а при рабочем движении привода ЗО фиксато ш 32 заходят в свои. гнезда и фиксируют опоры 36.
Использование преопагаемого устройства позволит ликвидировать тяжелый руч« ной труд на погрузочно - раэгу аоВдых и транспортно - складских работах.
изобретения
: пойЬврж эакшямн захватными органами, каждый на которых выполнен в виде L o iaaHOPo рычага, установленного на раме с Ш)1ожн6стыо регулирования накло .на в вертикальной плоскости и снабженного укрепленной на нем опорой, связанной посредством пальца и.копира с 1ФИВОЦОМ.
Источники инфирмации, принятые во внимание при экспертизе
eu 5J
22
Ф
23
гз
а
А-А
Г8
.$(риг.З
85О546 J5
