1
Изобретение относится к саморазгружающемуся автомобильному транспорту и может быть использовано для перемещения разгрузочной платформы с контейнером или с тяжеловесным неделимым грузом.
Известен автопоезд-саморазгрузчик, разгрузочная платформа которого перед разгрузкой сдвигается назад. Перемещение назад разгрузочной платформы осуществляется гидроцилиндром 1.
Недостатком этого устройства является ограниченная длина хода, которую может выполнить гидроцилиндр (1-2 м), что явно недостаточно при длине груза или платформы.
Известно также транспортное средство для перевозки тяжеловесных крупногабаритных грузов, преимущественно контейнеров, содержащее раму с продольными направляющими, каретки, установленные с возможностью перемещения по указанным направляющим посредством привода, подвижную в продольном направлении платформу с упорами и закрепленные на каретках подпружиненные захваты для взаимодействия с упорами платформы 2.
Но и это устройство обладает конструктивными недостатками, так как имеет в своем составе большое количество пружин, фиксаторы и гибкую связь (трос), что приводит к понижению надем ности устройства. Цель изобретения - упрощение конструкции и повыщение надежности. Для этого транспортное средство снабжено штангами, жестко присоединенными одними концами к захватам, и копирами, закрепленными на раме транспортного средства с возможностью вертикального перемещения посредством дополнительного
10 привода, при этом штанги выполнены с возможностью взаимодействия свободными концами с указанными копирами.
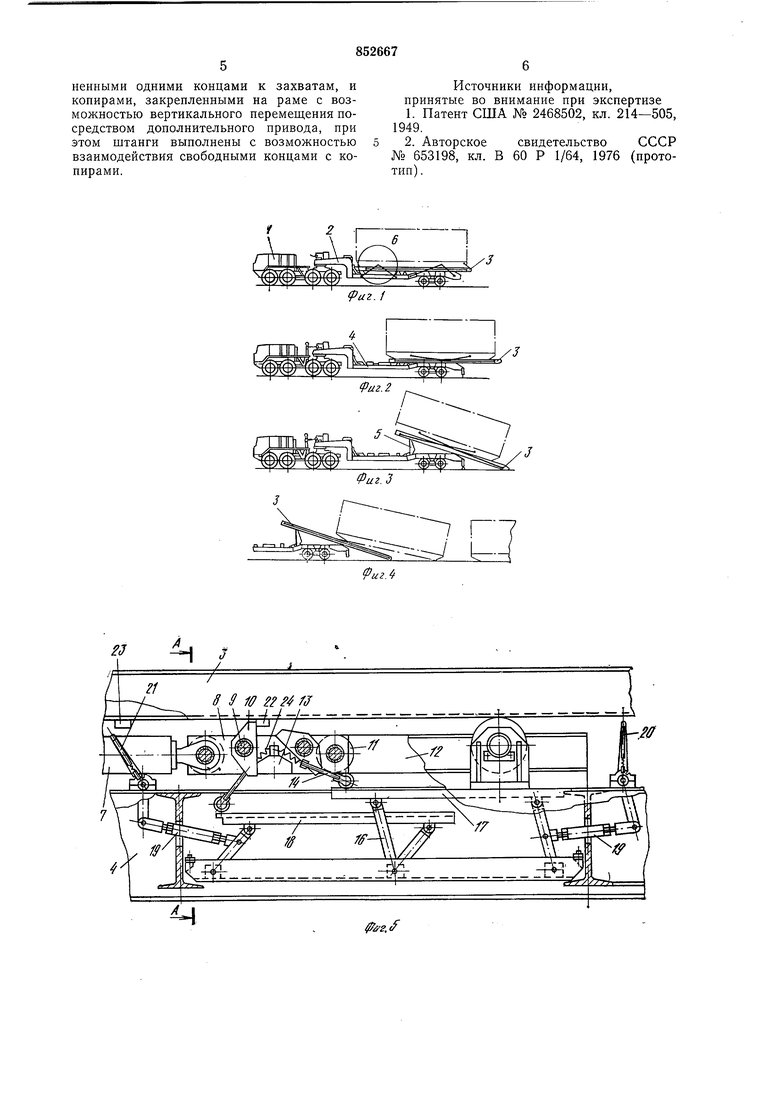
На фиг. 1 представлено предлагаемое транспортное средство, вид сбоку; на фиг.
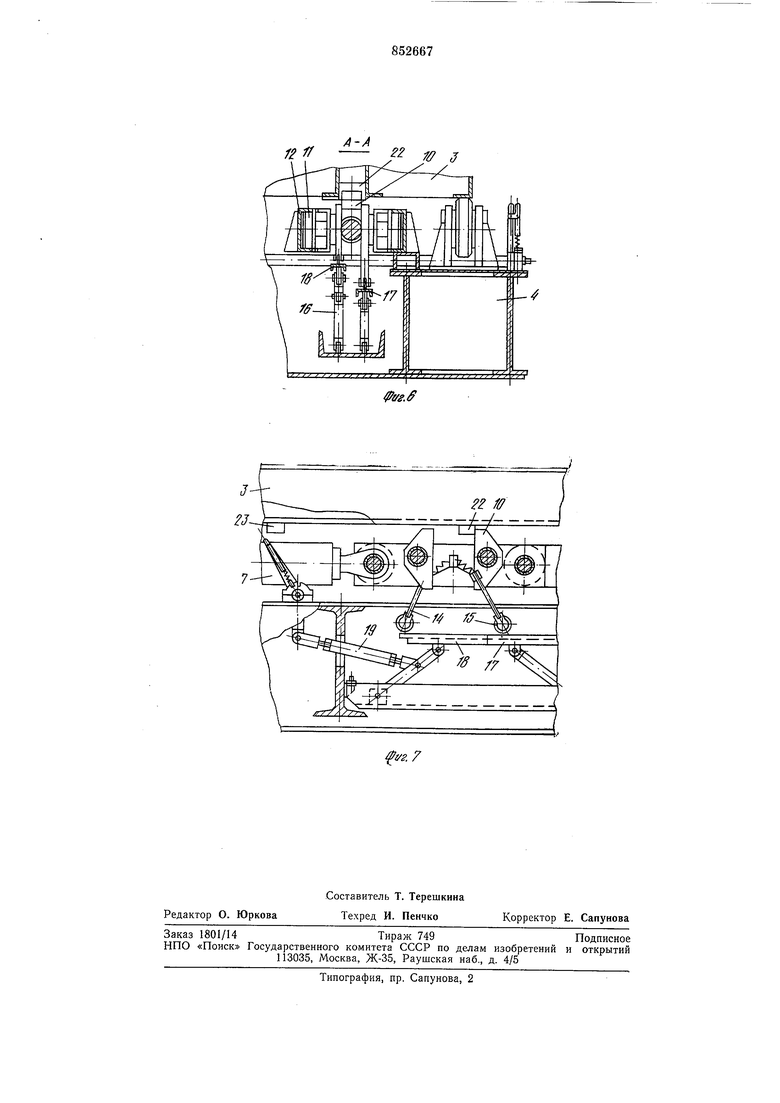
15 2 - то же, с перемещенной назад разгрузочной платформой; на фиг. 3 - то же, с наклонной разгрззочной платформой; на фиг. 4 - то .же, с наклонной разгузочной платформой в момент выезда из-под гру20 за; на фиг. 5 - устройство для перемещения разгрузочной платформы; на фиг. 6 - разрез А-А на фиг. 5; на фиг. 7 - устройство для перемещения разгрузочной платформы с поднятыми захвата.ми.
25 Транспортное средство состоит из тягача 1, полуприцепа 2 с разгрузочной платформой 3. На раме 4 (см. фиг. 2) полуприцепа 2 установлен подъемник 5 и привод 6 устройства для перемещения разгрузоч30 ной платформы 3, состоящего из гидроцилиндров 7 с шарнирно установленными на их штоках каретками 8 (см. фиг 5, 6, 7), на осях 9 которых шарнирно установлены захваты 10. :Каретки 8 имеют ролики 11, которые неремещаются по направляюш,им 12, укрепленными на раме 4 нолуприцена 2.
Захваты 10 смонтированы с двух сторон от унора - корнуса 13 каретки 8. На захватах 10 укреплены штанги 14 с установленными на их нижних концах роликами 15. Штанги 14 на захватах 10 укреплены асимметрично. Под штангами 14 захватов установлены на параллельных новоротных рычагах 16 копиры 17 и 18 с дополнительным приводом их перемеш;ения, выполненным в виде поворотных рычагов 16, шарнирно связанных тягой 19 с рукоятками управления 20 и 21. Платформа 3 выполнена с упорами 22, которые жестко закреплены на платформе 3 с интервалом, соответствуюш,им шагу (циклу) перемеш.ения платформы, т. е. каретка 8 способна переместить платформу 3 на один ход гидроцилиндра 7 на расстояние, равное расстоянию между упорами 22 и 23. В транспортном положении захваты 10 (см. фиг. 7) находятся в вертикальном положении, нри этом копиры 17 и 18 находятся в крайнем положении и штанги 14 кинематически не связаны с копирами 17 и 18. Разгрузка транспортного средства производится перемещением платформы 3 и последующим ее наклоном (опусканием) посредством подъемника 5. Перемещение платформы 3 осуществляется путем взаимодействия гидроцилипдра 7 на платформу 3 посредством захватов 9 каретки 8 и упоров 22 и 23 платформы. Полное перемещение платформы осуществляется за четыре хода гидроцилиндра 7 и каретки 8.
Устройство работает следующим образом.
В транспортном положении захваты 10 находятся в вертикальном положении, рукоятки 20 и 21 наклонены и зафиксированы фиксатором 24, а копиры 17 и 18 при этом расположены в нижнем положении (см. фиг. 7). Для разгрузки транспортного средства необходимо переместить платформу 3 назад. Для этого гидроцилиндр 7 включается на перемещение платформы, которое производится взаимодействием щтока гидроцилиндра 7 с кареткой 8 посредством захвата 10 и упора 22 платформы. После окончания первого хода раздвижки рукояткой 20 через тягу 19 поднимают копир 17, который опускает правый захват 10 для обратного (холостого) хода каретки 8. Фиксируют рукоятку 20 и в этом положении до окончания последнего хода раздвижки. Обратный холостой ход каретки 8 производится также гидроцилиндром 7, при этом левый захват 10, взаимодействуя с упором 23, поворачивается, не препятствуя
тем самым перемещению каретки 8. После прохождения упора 23 левый захват 10 вновь занимает вертикальное положение под действием пружины 24, необходимое для совершения следующего хода раздвижки (см. фиг. 5). Далее очередной цикл раздвижки повторяется, при этом количество циклов может быть различным и равно количеству упоров.
После заверщения последнего хода раздвижки включают подъемник 5 и наклоняют платформу 3. Происходит разгрузка. Неделимый груз сползает на землю задним концом. Транспортное средство выезжает
из-под груза до тех пор, пока груз полностью не съедет с платформы (см. фиг. 4). Транспортное средство останавливается. Правой рукояткой 20 опускают связанный с ней копир 17, правый захват 10 вновь
занимает вертикальное положение. Левой рукояткой 21 поднимают связанный с ней копир 18, который опускает левый захват 10. Подъемник 5 включается па возвращение платформы в горизонтальное положение. Когда платформа занимает горизонтальное положение, то последний упор на ней занимает место перед захватами каретки, которые подняты для затягивания. Включают гидроцилиндр 7 на втягивание платформы 3. Шток гидроцилиндра 7 перемещает каретку 8, которая своим поднятым правым захватом 10 затягивает платформу 3. Затем гидроцилиндр вновь выдвигает шток, каретка 8 с захватами
движется вправо, поднятый захват 10 проходит за следующий упор 23 на платформе и т. д. Все операции повторяются до полного затягивания платформы в транспортное положение.
Следует отметить, что все эти операции по управлению копирами могут исполняться сервомеханизмами. Транспортное средство вновь готово принять груз, отвести его в указанное место и разгрузить.
Годовой экономический эффект от внедрения одного транспортного средства составит ориентировочно 100 тыс. рублей.
Формула изобретения
Транспортное средство для перевозки тяжеловесных крупногабаритных грузов, преимущественно контейнеров, содержащее раму с продольными направляющими, каретки, установленные с возможностью перемещения по продольным направляющим посредством привода, подвижную в продольном направлении платформу с упорами и
закрепленные на каретках подпружиненные захваты для взаимодействия с упорами платформы, отличающееся тем, что, с целью упрощения конструкции и повыщения надежности транспортного средства,
оно снабжено штангами, жестко присоединенными одними концами к захватам, и коиирами, закрепленными на раме с возможностью вертикального перемещения посредством дополнительного привода, при этом штанги выполнепы с возможностью5 взаимодействия свободными концами с копирами. Источники информации, принятые во внимание при экспертизе 1. Патент США № 2468502, кл. 214-505, 1949. 2. Авторское свидетельство СССР № 653198, кл. В 60 Р 1/64, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения разгрузочной рамы контейнеровоза | 1977 |
|
SU653198A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Самопогрузчик | 1980 |
|
SU865205A1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2682526C2 |
| Устройство для закрепления разгрузочного ленточного конвейера на комбайне | 1986 |
|
SU1434114A1 |
| ТРАНСПОРТНО-СПЛОТОЧНЫЙ АГРЕГАТ | 1973 |
|
SU408847A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОГРУЗКИ, ПЕРЕВОЗКИ И РАЗГРУЗКИ РУЛОНОВ СЕНАЖА И СЕНА | 2008 |
|
RU2367135C1 |
| Подъемник для укладки мешков, тюков и т.п. грузов в штабель | 1945 |
|
SU68909A1 |
/3
