Изобретение относится к саморазгружающемуся автомобильному транспорту и может быть использовано при перемещениях разгрузочной рамы контейнеровоза или тяжеловесных грузов.
Известен контейнеровоз, разгрузочная рама которого перед разгрузкой сдвигается назад. Перемещение назад разгрузочной рамы осуществляется гидроцилиндром I.
Устройство для перемещения разгрузочной рамы одним гидроцилиндром применимо во всех случаях, кроме тех, когда ход перемещения рамы достаточно велик и превыщает 2-3 м. Недостатком этого устройства является его сложность.
Известно также устройство для перемещения разгрузочной рамы контейнеровоза, содержащее платформу с направляющими, жестко закрепленные на раме упоры и щарнирно установленные на платформе гидроцилиндры, захваты для взаимодействия с упорами 2.
Но и это устройство, имея преимущество щагового перемещения, обладает конструктивными недостатками, так как захват при нагружении всегда изгибает щток гидроцилиндра и при этом быстрее изнащиваются втулки и уплотнения гидроцилиндра, а щток в связи с этим д олжен иметь диаметр значительно болвший, чем необходимо из условий толкающего усилия. Это приводит к ухудщению эксплуатации и увеличению диаметра всего гидроцилиндра. Кроме того, управлениезахватом при смене направления движения не механизировано и не автоматизировано.
Цель изобретения - обеспечение автоматизации переключения захватов при перемещении разгрузочной рамы и уменьшение изгибающих моментов щтоков гидроцилиндров.
Эта цель достигается тем, что устройство снабжено кареткой, установленной с возможностью перемещения по указанным направляющим посредством гидроцилиндров, и двуплечим рычагом, шарнирно установленным на каретке, при этом захваты закреплены на каретке на осях с возможностью вращения, подпружинены и соединены с двуплечим рычагом гибкой связью.
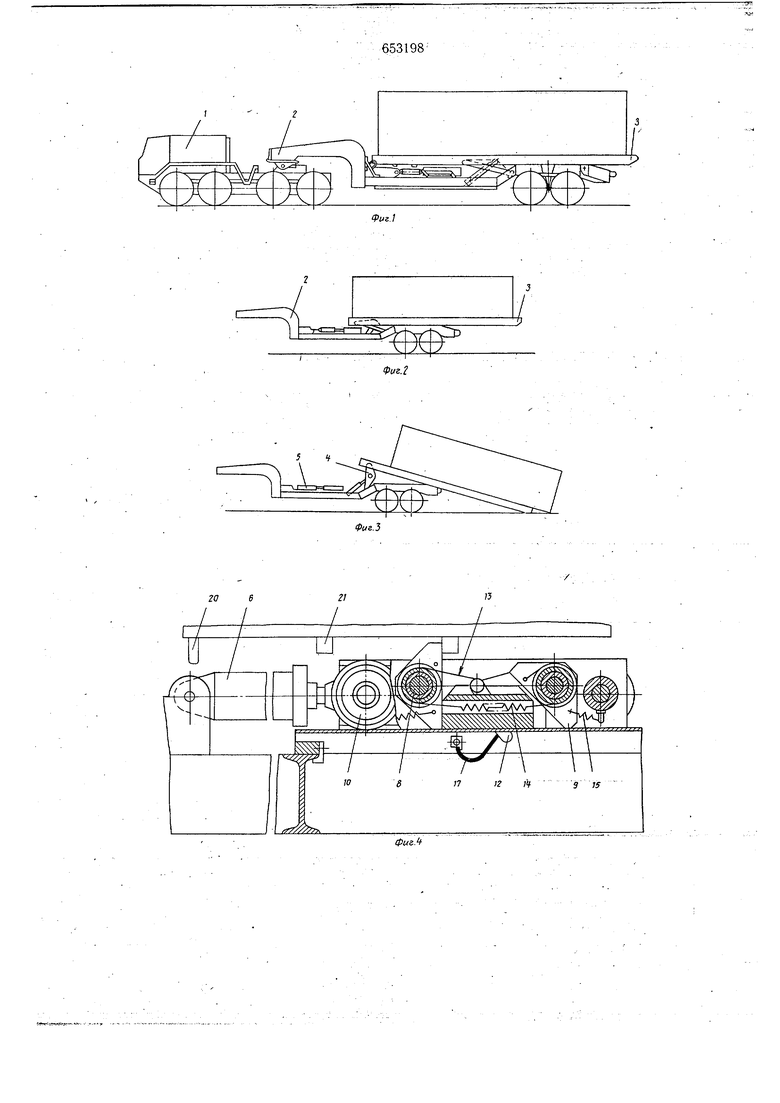
На фиг. 1 изображен автопоезд-контейнеровоз, вид сбоку; на фиг. 2 - контейнеровоз с перемещенной назад-разгрузочной рамой, вид сбоку; на фиг. 3 - контейнеровоз с наклоненной разгрузочной рамой; на на фиг. .4 - устройство для перемещения разгрузочной рамы в начале сдвига; на фиг. 5 - устройство для перемещения разгрузочной рамы, вид сверху; на фиг. 6 - сечение А-А на фиг. 5; на фиг. 7 - сечение Б-Б на фиг. 6; на фиг. 8 изображено устройство для перемещения разгрузочной рамы с переключающими упорами при окончании сдвига. Контейнеровоз состоит из тягача 1, полуприцепа 2 с разгрузочной рамой 3На полуприцепе 2 установлен подъемник 4 и устройство 5 для перемещения разгрузочной рамы 3, состоящее из гидроцилиндров 6 с шарнирно установленными, на их щтоках каретками 7, на осях 8 которых щарнирно установлены захваты 9. Каретки 7 имеют ролики 10, которые входят с возможностью перемещения в направляющие 11, укрепленные на полуприцепе 2. . Захваты 9 смонтированы с двух сторон ОТ двуплечего рычага 12, который шарнирно укреплен в каретке 7. Нижний конец рычага 12 выступает под кареткой 7, а верхний конец рычага 12 соединен с захватами 9 гибкими связями 13, включающими пружины 14 более сильные, чем пружины 15, соединяющие каждый захват 9 с кареткой 7. Рычаг 12 в правом и левом положениях задерживается фиксатором 16. Под направляющими 11 щарнирно укреплены управляющие упоры 17, которые тягой 18 через рычаги 19 соединены между собой и сцепляются с упорами 20 разгрузочной рамы 3, обеспечива ющими в исходнОм положении (см. фиг. 4) наклон правого и зацепление левого захвата 9 с упорами 21. При включении гидроцилиндра 6 на выдвижение щтока каретка 7 перемещается на кроликах по направляющим 11. Захват 9 (левый) за упор 21 перемещает разгрузочную рамы назад на один ход гидроцилиндра. После этого цгток гидроцилиндра б возвращает каретку 7 в исходное положение. При этом захват 9, стоящий вертикально, наёзжаег на последующий упор 21 своей тыльной стороной и при этом наклоняется, растягивая пружину 14. Пройдя очередной упор 21, захват 9 выпрямляется и готов к. следующему перемещению разгрузочной рамы 3 нЙзаД. ; При заверщении последнего хода назад разгрузочная рама 3 займет такое положе653198ние, при котором рычаги 19 поставят управляющие упоры 17 так, что они в конце хода каретки 7 переключают рычаг 12 из правого положения в левое (см., фиг. 8). Фиксаторы 16 задержат рычаг 12 в этом положении, а гибкая связь 13 пружиной 14 поднимет ранее наклоненный захват 9 (правый) и наклонит левый захват 9, как только он в Ь1 идетиз зацепления с упором 21 (при обратном ходе каретки 7 на затягивание или при наклоне разгрузочной рамы 3 подъемником 4). После наклона разгрузочной рамы 3 подъемником 4,. выгрузки груза и возврата рамыЗ в горизонтальное положение включением гидроцилиндра 6 на обратное перемещение рама 3 правыми захватами 9 будет перемещена в исходное транспортное положение. Вновь рама 3 наедет упорами 17 на рычаги 19, которые через тягу 18 изменят положение управляющих упоров 17 и далее все операции могут быть повторены согласно описанным. Контейнеровоз, состоящий из тягача 1 и полуприцепа 2, вновь готов принять груз, отвезти.егов указанное место и разгрузить, Формула изобретения Устройство для перемещения разгрузочной рамь контейнеровоза, содержащее платформу с направляющими, жестко закрепленными на раме упоры и щарнирно установленные на платформе гидроцилиндры, захваты для взаимодействия с упорами, отличающееся тем, что, с целью автоматизации переключения захватов при перемещении разгрузочной рамы и уменьшения изгибающих моментов щтоков гидроцилиндров, оно снабжено кареткой, установленной с возможноетью перемещения по указанным направляющим посредством гидроцилиндров, и двуплечим рычагом, щарнирно установленным на каретке, при этом захваты закреплены на каретке на осях с возможностью вращения, подпружинены и соединены с двуплечим рычагом гибкой связью. . Источники информации, принятые во внимание при экспертизе 1.Патент США № 2468502, кл. 214-505, 1949. 2.ПатентФРГ JMb 1480635, кл.63С,39, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для пере-ВОзКи ТяжЕлОВЕСНыХ КРупНОгАбАРиТ-НыХ гРузОВ | 1979 |
|
SU852667A1 |
| Устройство для подъема сменной грузонесущей емкости транспортного средства | 1986 |
|
SU1386501A1 |
| Полуприцеп-контейнеровоз с устройствами для погрузки и разгрузки | 1985 |
|
SU1355516A2 |
| ТРАНСПОРТНО-СПЛОТОЧНЫЙ АГРЕГАТ | 1973 |
|
SU408847A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Транспортное средство для перевозки длинномерных грузов | 1981 |
|
SU954277A1 |
| Транспортное средство со сменным контейнером | 1986 |
|
SU1397329A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| УСТРОЙСТВО для стыковки и ЦЕНТРОВКИ ТРУБОПРОВОДОВ | 1970 |
|
SU275617A1 |