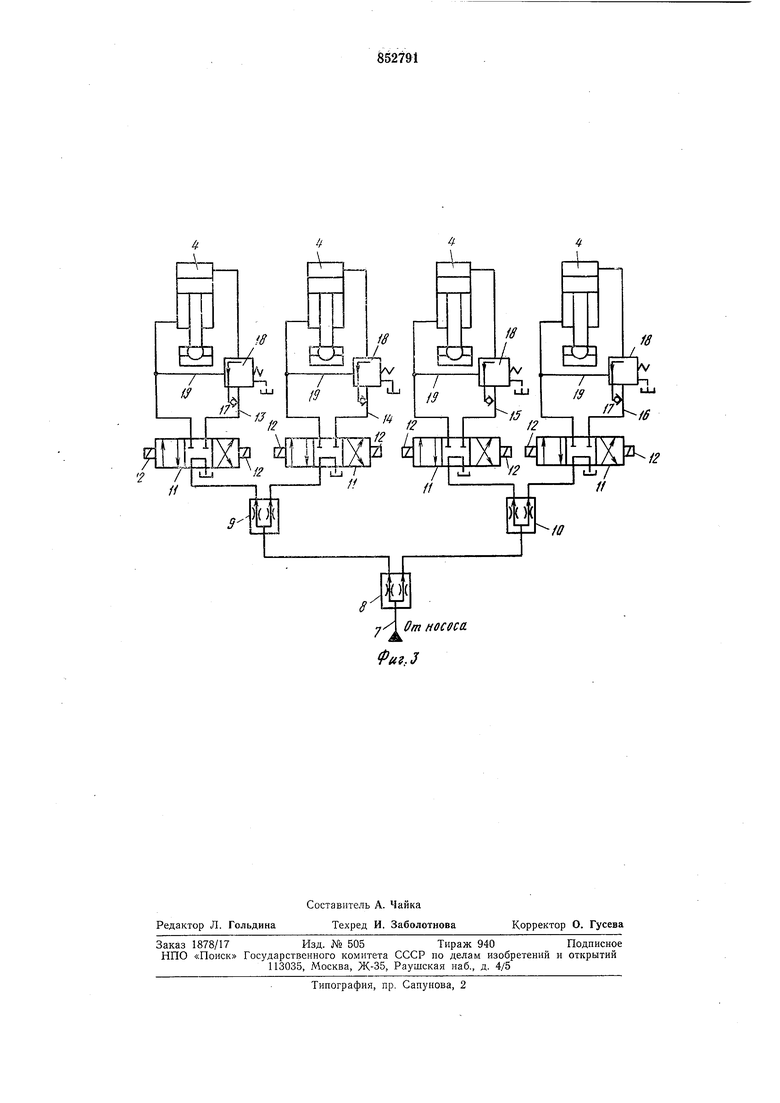
При опускании рамы включаются электромагниты 12 (левые по чертежу) распре делптелей 11. Питающие гидролинии подключаются к штоковым полостям гидродомкратов 4, а поршневые полости через напорные золотники 18 и распределители 11 соединяются с гидробаком.
В питающей гидролинии под действием насоса давление поднимается до величины настройки напорных золотников 18 и через линии дистанпионного управлепня 19 включает их, открывая путь к неретеканию жидкости из порщневых полостей гидродомкратов 4 через распределители 11 в гидробак. Происходит опускание устройства, в щтоковые полости всех гидродомкратов 4 через делители потока 9 и 10 постоянно поступает равное количество рабочей жидкости.
При опускании устройства под действием собственной массы или приложения других сил, даже переменных, скорость истечения жидкости из поршневых полостей гидродомкратов будет увеличиваться, освобождаемый объем штоковых полостей гидродомкратов в единипу времени будет большим ,чей ©бЬем поступаемой туда рабочей в единипу времени, так как колй ествй жидкости, подаваемое насосом .-В: ,ш рокввгьй ПОЛОСТИ за счет делителей потока .будет постоянным и равным.
Это издает понижение давления в штоковых полостях гидродомкратов 4 и нанорных магистралях 7 от насоса до величины меньшей настройки напорных золотников 18, последнне выключатся и перекроют слив из поршневых полостей гидродомкратов. Опускание устройства прекратится.
Давление в штоковой полости под действием подаваемой насосом жидкости начнет вновь возрастать до величины настройки напорных золотников 18 и через линии дистанционного управления 19 вновь включит напорные золотники, опускание устройства возобновится.
Таким образом, опускание устройства будет происходить без разгона и, поскольку в штоковые полости поступают равные количества жидкости, без перекоса, т. е. достигается безопасность его погрузки и разгрузки.
Кроме этого, предлагаемое соединение гидроаппаратуры помимо синхронной работы 4-х гидродомкратов дает возможность осуществить работу каладым из них в отдельности за счет подсоединения каладого гидродомкрата через индивидуальный распределитель к делителям потока.
Ожидаемый экономический эффект от внедрения только одного устройства при обслуживании пяти стволов шахт составит 25430 рублей в год.
Формула изобретения
Грузоподъемное устройство преимущественно для подъема шахтного оборудования,
содержащее установленную па гидродомкратах грузовую раму, гидрораспределители, соединяющие напорную магистраль с штоковыми полостями гидродомкратов, и напорпые золотники, соединенные питя1лщей линией с норшневой полостью гидродомкратов, отличающееся тем, что, с целью повышения надежности работы устройства путем предотвращения перекоса и разгона его при опускании под действием
собственной массы, напорные золотники соединены питающей линией через гндрораспределители с делителями потока и линией дистанционного управления со щтоковой полостью гидродомкратов.
Источники информапии,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 617364, кл. В 66F 7/20, 1977 (прототип).
2 /
f/
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2049937C1 |
| Гидрофицированный протяжной станок | 1985 |
|
SU1289627A1 |
| Гидропривод экскаватора | 1980 |
|
SU949090A1 |
| Гидропривод возвратно-поступательного движения | 1976 |
|
SU612077A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU929463A1 |
| Гидропривод грузовой лебедки | 1985 |
|
SU1268507A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
5
-г
3
fpuz.l
V/
//
II
От нососа.
Фи..3
