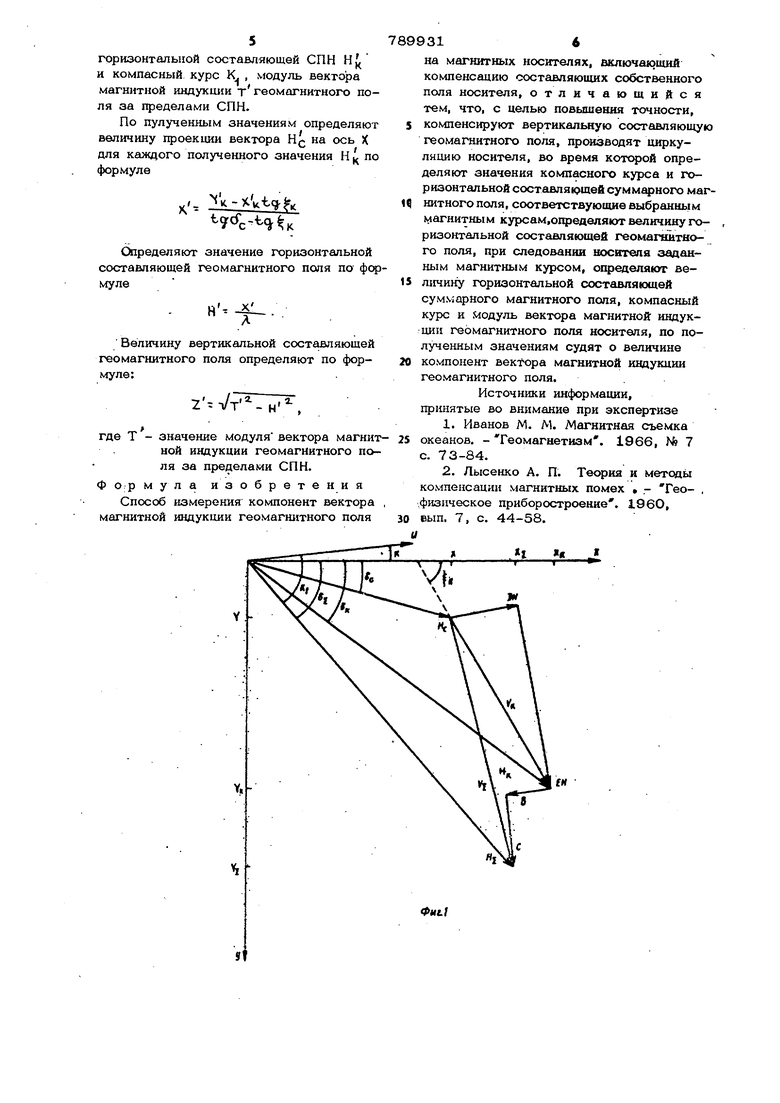
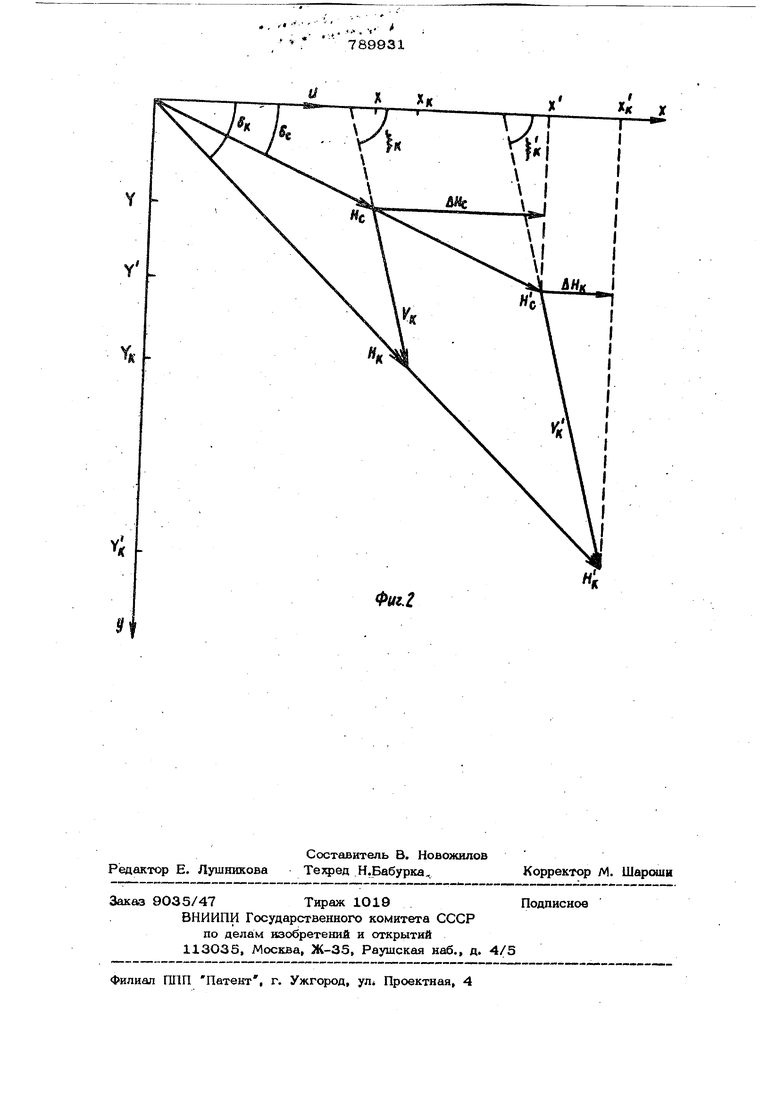
магнитного поля, соответствующие выбра ным магнитным курсом, определяют величину горизонтальной составляющей геомагнитного поля,, далее, лри следовании носителя заданным магнитным курсом, определяют величину горизонтальной составляющей суммарного магнитного поля, компасный курс и модуль вектора магнитной ивдукции геомагнитного поля вне собственного поля носителя, по полученным результатам судят о величине компонент вектора магнитной индукции геомагнитного поля. На фиг. 1изображено формирование го ризонтальной составляющей суммарного магнитного поля после компенсации его вертикальной составляющей; на фиг. 2 принцип определения компонент вектора магнитной индукции после компенсации составляющих собственного поля носителя. Способ определения компонент ВМИ геомагнитного поля на магнитных носителях заключается в том, что компенсируют вертикальную составляющую суммарного магнитного поля (СМП); а затем разворачивают носитель на 360° в однородном геомагнитном поле и на выбранных магнитных курсах определяют вели чину горизонтальной составляющей СМП, Н значение компасного курса носителя К.. Кроме того определяют величину горизон тальной составляющей геомагнитного поля HQ в районе проведения носителем циркуляции. Эта величина может быть известна, если циркуляция носителя проводится на полигоне с уже известным з чением горизонтальной составляющей геомагнитного поля. По данным измерений в прямоугольной системе координат (ось совпадает с направлением геомагнитного меридиана, ось у перпендикулярна этому направ лению, плоскость COvjсовпадает с плоскостью горизонта) определяютвеличины составляющих собственного поля носител (СПН). Затем определяют величину и на правление вектора FL. Кроме этого, нах дят направление вектора V для каждого нитного курса, на котором в дальнейщем будут проводиться геомагнитные измере ния (см. фиг. 1). На фиг. 1 приняты следующие обозна чения: U - вектор скорости носителя; К - м гнитный курс носителя, К - компасный курс для данной точки, i7c - вектор, вел чина и направление которого не зависят от магнитного курса носителя (сГ- - потоянен); Vg - вектор, величина и направение которого зависят от магнитного урса носителя; VJ,--VВ С , V W(DH)%fEH)2, B-cz+p; c- z-HQ; 13H,EH,CZ.Zоставляющие СПН, величины которых пределяют ся индуцированным намагничианием магнитомягких материалов контрукции носителя; Р, Q - составляющие ПН, величины которых определяются постоянным намагничиванием магнито- жестких материалов конструкции носиеля, Н, Z - величины горизонтальной и вертикальной составляющих геомагнитного поля, соответственно, Hjj - ropjj3OHтальная составляющая СПН (Р - Vg); Y X - проекции вектора Н{ на оси X и . V , соответственно, - проекции вектора Н) на оси X и V . соответственно; Xj, - проекции вектора оси X и V , соответственно, ЯН, Ч АН, По векторной диаграме находят проекцию вектора HC на направление геомагнитного меридиана (.Но), т.е. на ocblL. Находят величину , После определения составляющих СПН создают дополнительные попя, компенсируют составляющие В и С. В этом случае горизонтальная составляющая СПН равна Н|, так как фиг. 2 поясняется принцип определения проекций текущих значений вектора Н На Ось X для любой точки носителя по мере его движения в геомагнитном поля (после компенсации составляющих СПН, которые определяются векторами В и с). Для простоты полагаем,. данном случае . 14 (- - текущее значение вектора, Н liy - текущее значение вектора Н, j - текущее OHa4ejnie вектора , д.Н(- . г оёкции йоктора (М - Н) на ось, (); л.Н, - проекция вектора V|t на ось X./ лМ - приращение горизонтальНОЙ составляющей -геомагнитного доля; к fc У- векторами VK , и осыоХ, соответственно ( остальные обозначения понятны из чертежа. В дальнейшем при движении носителя в в геомагнитном поле определенным магнитным курсо.ч) К опроделиют величину горизонтальной составляющей СПН Н и компасный курс К, , модуль вектора магнитной индукшш т геомагнитного поля за пределами СПН. По пулученным значениям определяют величину проекции вектора Н на ось X для каждого полученного значения И по формуле . Определяют значение горизонтальной составляющей геомагнитного поля по фо муле Н- Л Величину вертикальной составляющей геомагнитного поля определяют по формуле:ZWy.H где Т - значение модуля вектора магнит вой индукции геомагнитного поля за пределами СПН. Ф о р мула изобретения Способ измерения компонент вектора магнитной индукции геомагнитного поля 316 на магнитных носителях, включающий компенсацию составляющих собственного поля носителя, отличающийся тем, что, с целью повыщення точности, компенсируют вертикальную составляющую геомагнитного поля, производят циркуляцию носителя, во время которой определяют значения компасного курса и горизонтальной составлякшей суммарного магнитного поля t соответствующие выбраннь м магнитным курсам.определяют величину горизонтальной составляющей геомагнитного поля, при следовании носвтепя заданным магнитным курсом, определяют величину горизонтальной составляющей суммарного магнитного поля, компасный курс и модуль вектора магнитной индукции геомагнитного поля носителя, по полученным значениям судят о величине компонент вектора магнитной индукции геомагнитного поля. Источники информации, принятые во внимание при экспертизе 1. Иванов М. М. Магнитная съемка океанов. - Геомагнетизм. 1966, N9 7 с. 73-84. 2. Лысенко А. П. Теория и методы компенсации магнитных помех .- Тео- , физическое приборостроение . 1960, вып. 7, с. 44-58. 1 « J
Л Хк
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ БЛЕДНОВА | 1980 |
|
SU854156A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОМАГНИТНОГО МЕРИДИАНА | 1979 |
|
SU843551A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ | 1980 |
|
SU854155A1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
«i
.f
