Изобретение относится к области магнитометрии, точнее к методам определения направления геомагнитного меридиана вблизи ферромагнитных масс, например с борта носителей, имеющих собственное магнитное поле.
Известен способ определения направления геомагнитного меридиана с помощью магнитных компасов на магнитных носителях, включающий компенсацию собственного поля носителя [1]
Известный способ включает измерение компасного курса при циркуляции носителя на восьми магнитных курсах в районе с известным направлением геомагнитного меридиана и компенсацию вертикальной составляющей суммарного магнитного поля носителя. По результатам измерений определяют коэффициенты девиации для этого района. По данным измерений с помощью магнитомягких и магнитотяжелых материалов добиваются уменьшения угла рассогласования между направлением геомагнитного меридиана и показаниями магнитного компаса.
В дальнейшем в заданном районе определяют направление геомагнитного меридиана с помощью показаний магнитного компаса.
К недостаткам данного способа можно отнести техническую трудность полной компенсации всех составляющих собственного поля носителя. Кроме того, точность проведенной компенсации в известном районе ухудшается в других районах земного шара из-за изменения параметров геомагнитного поля (горизонтальной и вертикальной составляющих). Это происходит вследствие того, что силы, действующие на стрелку магнитного компаса, определяются произведением коэффициентов девиации на один из параметров геомагнитного поля. Эти величины на обычных морских судах в точке установки главных магнитных компасов достигают порядка десятка градусов.
С целью повышения точности, при способе определения направления геомагнитного меридиана, включающем измерение компасного курса при циркуляции носителя в районе с известным направлением геомагнитного меридиана, компенсацию вертикальной составляющей суммарного магнитного поля и определение коэффициентов девиации в этом районе, в заданном районе и в районе с известным направлением геомагнитного меридиана определяют величину горизонтальной составляющей геомагнитного поля, в заданном районе определяют величину горизонтальной составляющей вектора магнитной индукции суммарного магнитного поля и компасный курс при циркуляции носителя относительно выбранного направления геомагнитного меридиана, а о направлении геомагнитного меридиана судят путем сравнения коэффициентов девиации, полученных в районе с известным направлением геомагнитного меридиана и в заданном районе.
Эта цель достигается также и тем, что носитель при циркуляции движется четырьмя магнитными курсами, два из которых определяются из условия
α= 90°•n
где α магнитный курс, градус;
n 0,2, либо n 1,3,
а два других из условия
α = 45+90°•m
где m 0, 1, 2, 3.
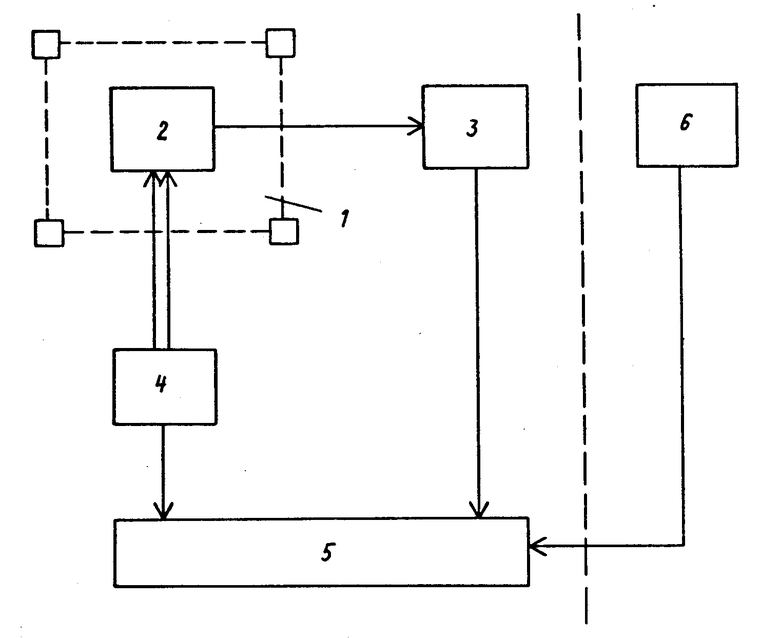
На чертеже приведена блок-схема устройства, реализующего способ определения направления геомагнитного меридиана.
Устройство содержит систему компенсации 1, компонентный модульный преобразователь 2, измеритель 3, измеритель угла 4 между направлением геомагнитного меридиана и направлением горизонтальной составляющей суммарного магнитного поля, вычислитель 5 и преобразователь 6, определяющий горизонтальную составляющую геомагнитного поля вне носителя. Способ определения направления геомагнитного меридиана реализуется следующим образом.
С помощью системы компенсации 1 создают дополнительное магнитное поле, которое компенсирует вертикальную составляющую суммарного магнитного поля. При достижении полной компенсации модульный преобразователь 2 и измеритель 3 индуцирует минимальную величину суммарного магнитного поля. Такая компенсация может поддерживаться автоматически с помощью экстремальной системы регулировки. Затем при движении носителя определенными магнитными курсами с помощью модульного преобразователя 2 и измерителя 3 определяют модуль вектора магнитной индукции. Сам модульный преобразователь 2, являясь компонентным преобразователем, покажет еще и направление горизонтальной составляющей вектора магнитной индукции. Преобразователем 6, работающим вне носителя, измеряют величину горизонтальной составляющей геомагнитного поля в районе циркуляции носителя. С помощью измерителя угла 4 определяют угол между направлением геомагнитного меридиана и вектором горизонтальной составляющей суммарного магнитного поля. Этих данных достаточно, чтобы по результатам измерений в районе с известным направлением геомагнитного меридиана из уравнений Пуассона найти истинные значения коэффициентов девиации. Далее задают с определенной точностью направление геомагнитного меридиана, измеряют величину горизонтальных составляющих суммарного магнитного поля и компасные курсы при движении носителя относительно заданного направления, определяют величину горизонтальной составляющей геомагнитного поля преобразователя 6, вынесенным за пределы носителя. Полученные данные поступают в вычислитель 5, и после обработки по ним судят об истинном направлении геомагнитного меридиана. Данный способ позволяет определить направление геомагнитного меридиана на борту носителей, имеющих собственное магнитное поле, в любом месте мирового океана, позволяет контролировать направление геомагнитного меридиана, причем индуцированные коэффициенты девиации, определенные на специальных полигонах, могут быть проверены по результатам измерений в районах, где направление геомагнитного меридиана известно с достаточной точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения компонентов вектора магнитной индукции геомагнитного поля на магнитных носителях | 1978 |
|
SU789931A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ВЕКТОРА МАГНИТНОЙ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ БЛЕДНОВА | 1980 |
|
SU854156A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НА БОРТУ ДВИЖУЩЕГОСЯ ФЕРРОМАГНИТНОГО НОСИТЕЛЯ КОМПОНЕНТ МАГНИТНОГО ПОЛЯ ЗЕМЛИ И СОСТАВЛЯЮЩИХ ЕГО СОБСТВЕННОГО МАГНИТНОГО ПОЛЯ | 1994 |
|
RU2073891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
1. Способ определения направления геомагнитного меридиана, включающий измерение компасного курса при циркуляции носителя в районе с известным направлением геомагнитного меридиана, компенсацию вертикальной составляющей суммарного магнитного поля и определение коэффициентов девиации в этом районе, отличающийся тем, что, с целью повышения точности, в заданном районе и в районе с известным направлением геомагнитного меридиана определяют величину горизонтальной составляющей вектора магнитной индукции суммарного магнитного поля и компасный курс при циркуляции носителя относительно выбранного направления геомагнитного меридиана, а о направлении геомагнитного меридиана судят путем сравнения коэффициентов девиации, полученных в районе с известным направлением геомагнитного меридиана и в заданном районе.
2. Способ по п. 1, отличающийся тем, что носитель при циркуляции движется четырьмя магнитными курсами, два из которых определяются из условия:
α=90°•n,
где α - магнитный курс, градус;
n= 0,2, либо n = 1,3,
а два других - из условия:
α=45+90°•m,
где m = 0,1,2,3.
α=90°•n,
где α магнитный курс, градус;
n 0,2 либо n 1,3,
а два других из условия
α=45+90°•m,
где m 0,1,2,3.
| Рыбалтовский Н.Ю | |||
| "Магнитно-компасное дело", "Морской транспорт" | |||
| М-Л., 1952, с | |||
| СЧЕТНЫЙ ДИСК ДЛЯ РАСЧЕТА СОСТАВНЫХ ЧАСТЕЙ ПИЩИ | 1919 |
|
SU284A1 |
