(ЗА) ЦЕНТРИФУГА
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для воспроизведения ускорений | 1982 |
|
SU1062616A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| СПОСОБ ОЦЕНКИ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ | 2013 |
|
RU2526508C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| Двойная центрифуга | 1976 |
|
SU600452A1 |
| Установка для вопроизведения линейных ускорений | 1989 |
|
SU1700487A1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 2001 |
|
RU2210744C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
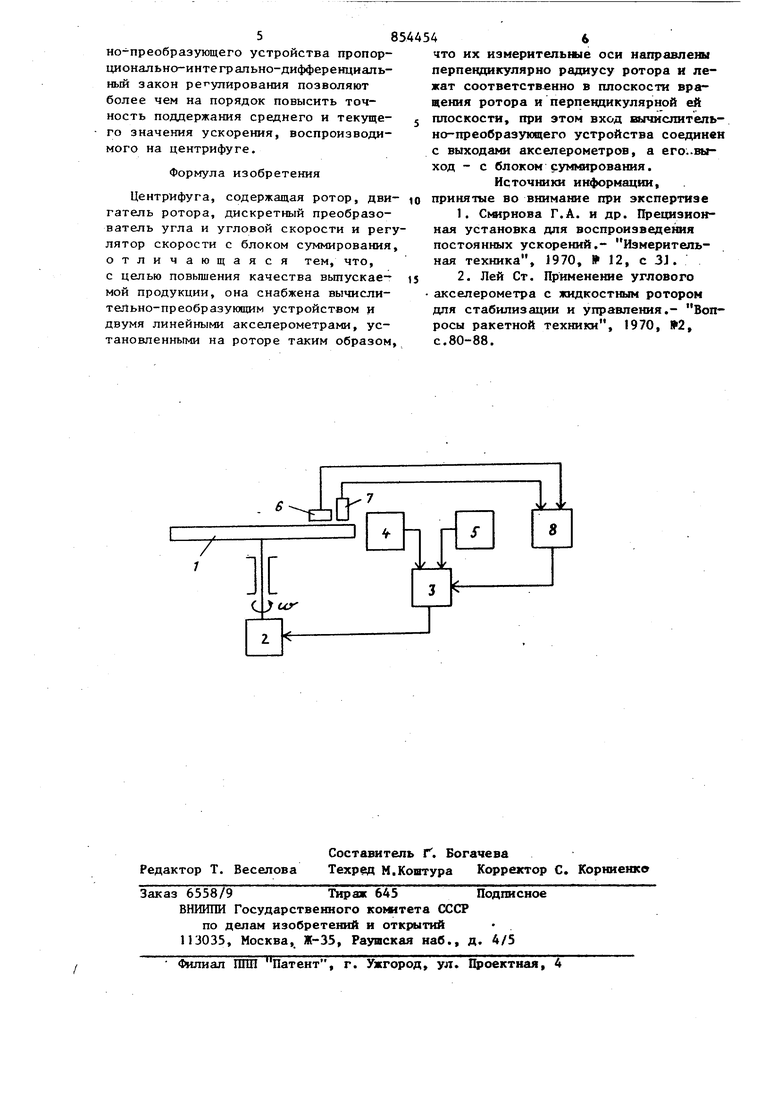
Изобретение относится к измерител ной технике, предназначено для воспроизведения линейных ускорений и мо жет быть использовано в приборострое нии, в частности для поверки и градуировки низкочастотных линейных акселерометров. Известна центрифуга для воспроизведения линейных ускорений, содержащая ротор с установленным на нем поверяемым прибором, приводимый во вращение электродвигателем. Для поддержания заданной угловой скорости ротора Ш, определяющей требуемое значение воспроизводимого ускорения CIVW R, где R - радиус ротора, центрифуга снабжена замкнутой системой регулирования скорости, включающей последовательно соединенные измерительный преобразователь угла или угловой скорости ротора, регулятор дискретный преобразователь, час тота на выходе которого пропорциональна угловой скорости ротора. Сигнал с выхода преобразователя поступает на вход регулятора, где сравнивается с сигналом от задающего генератора, частота которого пропорциональна заданному значению угловой скорости ротора. При равенстве частот на обоих входах регулятором поддерживается режим постоянной угловой скорости ротора. Данная система регулирования позволяет с высокой точностью воспроизводить среднее значение угловой скорости р. Недостатком данной центрифуги является наличие мгновенных колебаний угловой скорости ротора, более чем на один-два порядка превышающих колебаний среднего значения, что приводит к соответствующей погрешности воспроизведения мгновенного значения ускорения. Наиболее близкой к предлагаемой является центрифуга, содержащая ротор, двигатель ротора, дискретный 3 преобразователь угла и угловой скорости и регулятор скорости с блоком суммирования 21. Недостатком данной центрифуги является ограниченная возможность повышения точности стабилизации угловой скорости, так как лучшие из сзпдествующих угловых акселерометров имеют погрешность воспроизведения углового ускорения 0,3-1% в зависимости от диапазона ускорения. Цель изобретения - повышение качества вьтускаеь€ой продукции за счет более точного воспроизведения мгновенного значения ускорения, воспроиз водимого центрифугой. Указанная цель достигается тем, что центрифуга, содержащая ротор, двигатель ротора, дискретге 1й преобразователь угла и угловой скорости и регулятор скорости с блоком суммирования, снабжена вычислительно-преобразующим устройством и двумя линей ными акселерометрами, установленными на роторе таким образом, что их измерительные оси направлены перпендикулярно радиусу ротора и лежат соответственно в плоскости вращения рото и перпендикулярной ей плоскости, при этом вход вычислительно-преобразующего устройства соединен с выходами акселерометров, а его выход - с блоком суммирования. На чертеже изображена центрифуга Центрифуга имеет ротор 1, установ ленный в подшипниках корпуса и при во вращение электродвигателем 2. Центрифуга снабжена регулятором 3 скорости с блоком суммирования дискретным преобразователем 4 угла и угловой скорости и задающим генератором 5. На роторе 1 центрифуги, на расстоянии h от оси вращения, у тановлены два линейных акселерометр 6 и 7 с аналоговыми выходами, измери тельные оси направлены перпендикуля но радиусу ротора, при этом измерительная ось акселерометра 6 лежит в плоскости вращения ротора 1, а изме рительная ось акселерометра 7 - в п пендикулярной ей плоскости. Выход акселерометрор 6 и 7 соединен со вх дом вычислительио-преобразукяцего устройства 8, а его выход соединен с блоком суммирования регулятора 3 скорости. Центрифуга работает следукщим об разом. Средняя угловая скорость ротора I оддерживается так же, как у известого. Сигнал дискретного преобразоваеля 4 угла и угловой скорости, часота на выходе которого пропорциоальна угловой скорости ротора 1, равнивается на входе регулятора ;з корости с сигналом задающего генеатора 5, частота которого пропорциоальна заданному значению угловой корости ротора 1. Регулятор 3 скоости воздействует на напряжение, поаваемое на электродвигатель 2 так, тобы установился режим синхронизаии заданной угловой скорости ротора 1, при котором равны частоты сигналов а выходе преобразователя 4 скорости задающего генератора 5. При мгноенных колебаниях угловой скорости отора 1 на выходе акселерометра 6 оявляется сигнал, пропорциональный где а - ускорение по направлению измерительной оси акселерометра 6. Этот сигнал преобразуется в вычислительно-преобразующем, устройстве 8 по заданному алгоритму настройки и поступает на вход блока суммирования регулятора 3 скорости. Замкнутая система, вкпючакхцая линейный акселерометр 6, вычислительно-преобразующее устройство 8, регулятор 3 скорости и электродвигатель 2, позволяет устранить мгновенные колебания угловой скорости ротора 1 и повысить точность воспроизведения мгновенного значения ускорения. При отклонении ротора 1 центрифуги в процессе вращения от гЬризонтальной плоскости, в частности для центрифуг с наклонной осью вращения, в выходном сигнале акселерометра 6 появляется дополнительная составляющая, вызванная действием Ускорения свободного падения. Эта составляющая компенсируется в вычислительно-преобразующем устройстве 8 по определенному закону сигналом, снимаемз1м с выхода акселерометра 7. Ш)1числительно-преобразук п щее устройство 8 позволяет ввести в закон регулирования составляющие, пропорциональные среднему значению угловой скорости ротора 1 и колебанием ее текущего значения. Данная схема включения линейных акселерометров с аналоговыми выходами и реализуекьш с помощью вычислительно-преобразунлцего устройства пропорционально-интегрально-дифференциальный закон рет-упирования позволяют более чем на порядок повысить точность поддержания среднего и текущего значения ускорения, воспроизводимого на центрифуге.
Формула изобретения
Центрифуга, содержащая ротор, двигатель ротора, дискретный преобразователь угла и угловой скорости и регулятор скорости с блоком суммирования, отличающаяся тем, что, с целью повьшения качества вьтускаемой продукции, она снабжена вычислительно-преобразующим устройством и двумя линейными акселерометрами, установленными на роторе таким образом.
что их измерительные оси направлены перпевдикулярно радиусу ротора и лежат соответств.енно в плоскости вращения ротора и перпеццикулярной ей плоскости, при этом вход вычислительно-преобразующего устройства соединен с выходами акселерометров, а его:.выход - с блоком суммирования.
Источники информации, принятые во внимание при экспертизе
акселерометра с жидкостным ротором для стабилизации и управления,- Вопросы ракетной техники, 1970, 2, с.80-88.
