со
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Устройство для отображения информа-ции HA эКРАНЕ элЕКТРОННО-лучЕВОйТРубКи | 1978 |
|
SU813498A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| Устройство для отображения информацииНА эКРАНЕ элЕКТРОННО-лучЕВОй ТРубКи | 1979 |
|
SU824287A1 |
| Устройство для линеаризации функций | 1979 |
|
SU864307A1 |
| Установка для воспроизведения ускорений | 1982 |
|
SU1062616A1 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
Изобретение относится к измерительной и испытательной технике и может быть использовано в установках метрологического и испытательного назначения при воспроизведении линейных ускорений. Целью изобретения является повышение точности воспроизведения линейных ускорений в динамических режимах работы за счет введения в закон регулирования составляющей, пропорциональной первой производной от сигнала задания и стабилизации параметров контура регулирования линейных ускорений при любых значениях воспроизводимого параметра. Сигналы с блока 1 задания градиента ускорения и блока 2 задания ускорения поступают на соответствующие входы блока 3 комбинированного управления. Выходной сигнал блока 3 в блоке 4 сравнения сравнивается с сигналом блока 14 передачи информации датчика 12 воспро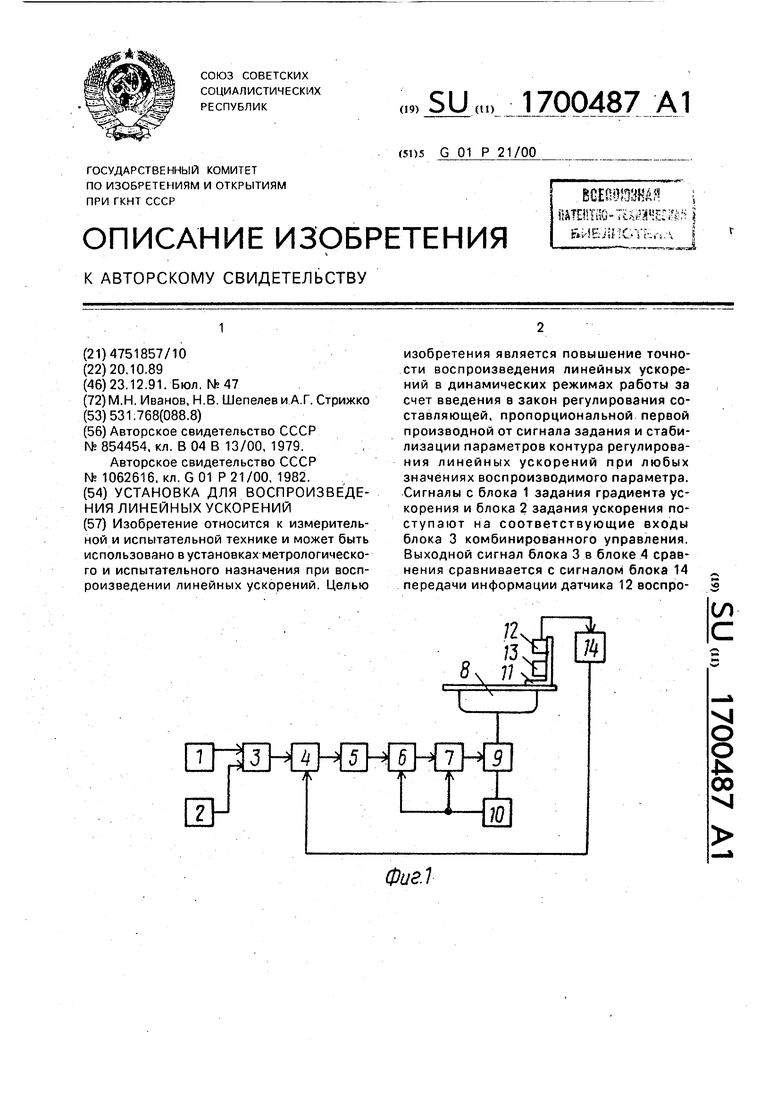
3
2
00 VI
Фие.1
изводимого линейного ускорения, который совместно с испытуемым прибором 13 установлен на платформе 11, связанной с ротором 8 и двигателем 9 привода. Разностный сигнал с выхода блока 4 преобразуется ре- гулятором 5 ускорения и поступает через блок 6 линеаризации на блок 7 управления приводом, который управляет двигателем 9
Изобретение относится к измерительной и испытательной технике и может быть использовано в установках метрологического и испытательного назначения при воспроизведении линейных ускорений.
Цель изобретения - повышение точности воспроизведения линейных ускорений в динамических режимах работы установки.
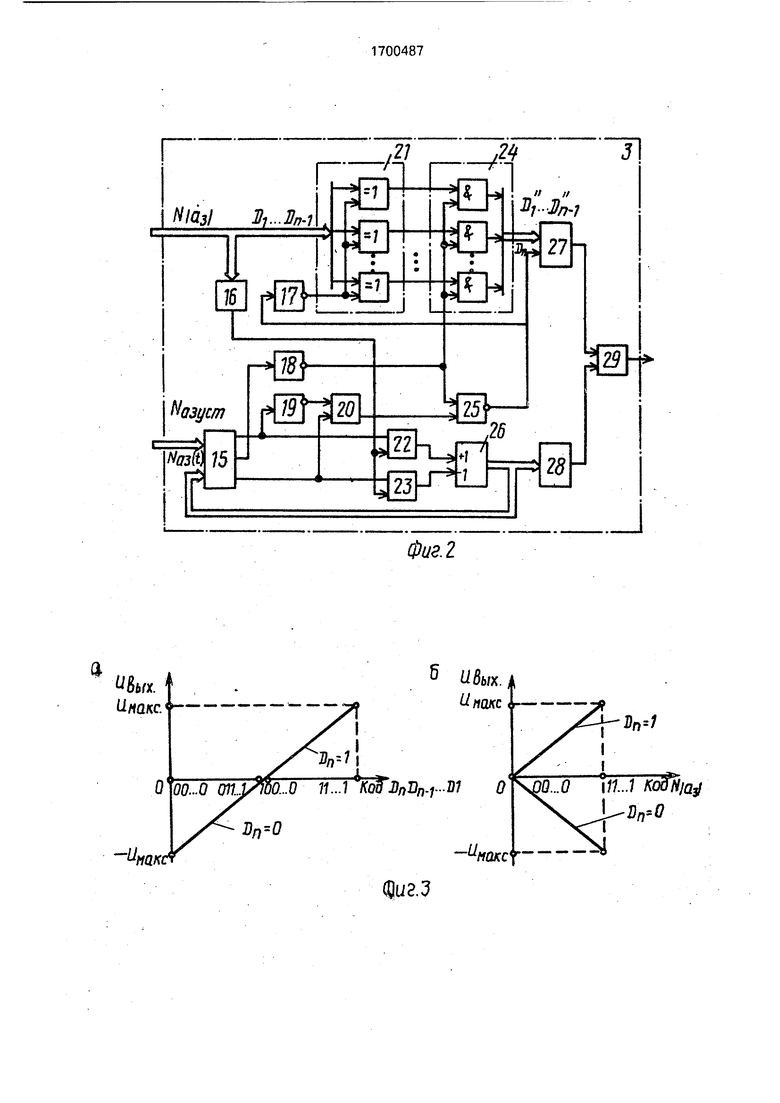
На фиг. 1 представлена функциональная схема установки для воспроизведения линейных ускорений; на фиг. 2 - функциональная схема блока комбинированного управления; на фиг. 3 - кривые изменения выходного сигнала первого преобразователя цифра-аналог; на фиг. 4 - функциональ- пая схема блока линеаризации; на фиг. 5 - функциональная схема блока управления приводом.
Установка для воспроизведения линейных ускорений (фиг. 1) содержит блок 1 за- дания градиента ускорения, блок 2 задания ускорения, блокЗ комбинированного управления, блок 4 сравнения, регулятор 5 ускорения, блок б линеаризации, блок 7 управления приводом, ротор 8 с приводом, двига тель 9 привода, датчик 10 угловой скорости ротора, платформу 11 для крепления исследуемых приборов, датчик 12 воспроизводимого линейного ускорения, испытуемый прибор 13 и блок 14 передачи информации.
Блок 3 комбинированного управления (фиг, 2) содержит компаратор 15, преобразователь 16 код-частота, первый, второй и третий элементы НЕ 17-19, первый элемент И 20, преобразователь 21 кода, второй и третий элементы И 22 и 23, ключ 24 элемент И-НЕ 25, счетчик 26, первый и второй преобразователи 27 и 28 цифра-аналог, сум- матор 29.
Блок 3 комбинированного управления предназначен для формирования сигнала, пропорционального сумме подлежащего воспроизведению закона изменения уско- рения во времени аз (t) (сигнала задания
привода. С двигателем 9 связан датчик 10 угловой скорости ротора, сигналы с которого поступают на блоки 6 и 7 для обеспечения требуемых характеристик этих блоков. По сигналам блока 7 управления, ротор 8 двигателя 9 вращается и на платформе 11 создается требуемое линейное ускорение. 5 ил.
ускорения), и составляющей, пропорциональной его первой производной аз (t).
В установившемся .режиме выходной сигнал блока 3 комбинированного управления равен
YK 33(t) ЭзустКду,(1)
где а3уст -значение, подлежащего воспроизведению ускорения в установившемся режиме;
Кду - коэффициент передачи датчика 12 линейного ускорения с учетом блока 14 передачи информации.
В динамических режимах работы (при воспроизведении переменных ускорений)
Ук (аз(т.) + Т1эз(г))КДу,(2)
где Ti - коэффициент, имеющий размерность времени (постоянная времени).
Составляющая аз(т.) определяется как t
аз (t ) / аз (t) / sign {азуст - a (t) / dt,
о
(3)
(1 ,азуст - аз (t); где sign (a3yCT-d3(t)) j 0,азуст аз (t); (4)
(-1 азуст аз(т.).
Зависимости (3) и (4) реализованы в схеме блока 3 комбинированного управления на базе преобразователя 16 код-частота, управляемого кодом N/аз/, поступающим на первый вход блока 3 комбинированного управления, а также на базе второго и третьего элементов И 22 и 23, счетчика 26, выполняющего функцию интегратора, второго преобразователя 28 цифра-аналог и компаратора 15. Модуль last I градиента as(t) в уравнениях (1}-(3) зависит от кода N/а з, а знак эзф определяется согласно выражению (4) с помощью дешифратора знака (третий элемент НЕ 19) и первый элемент И 20), подключенного к выходам. и компаратора 15. Составляющая КдуазМ в уравнении (2) формируется с помощью первого и второго элементов НЕ 17 и i8, преобразователя 21 кода, ключа 24, элемента И-НЕ 25 и первого преобразователя 27 цифра-аналог.
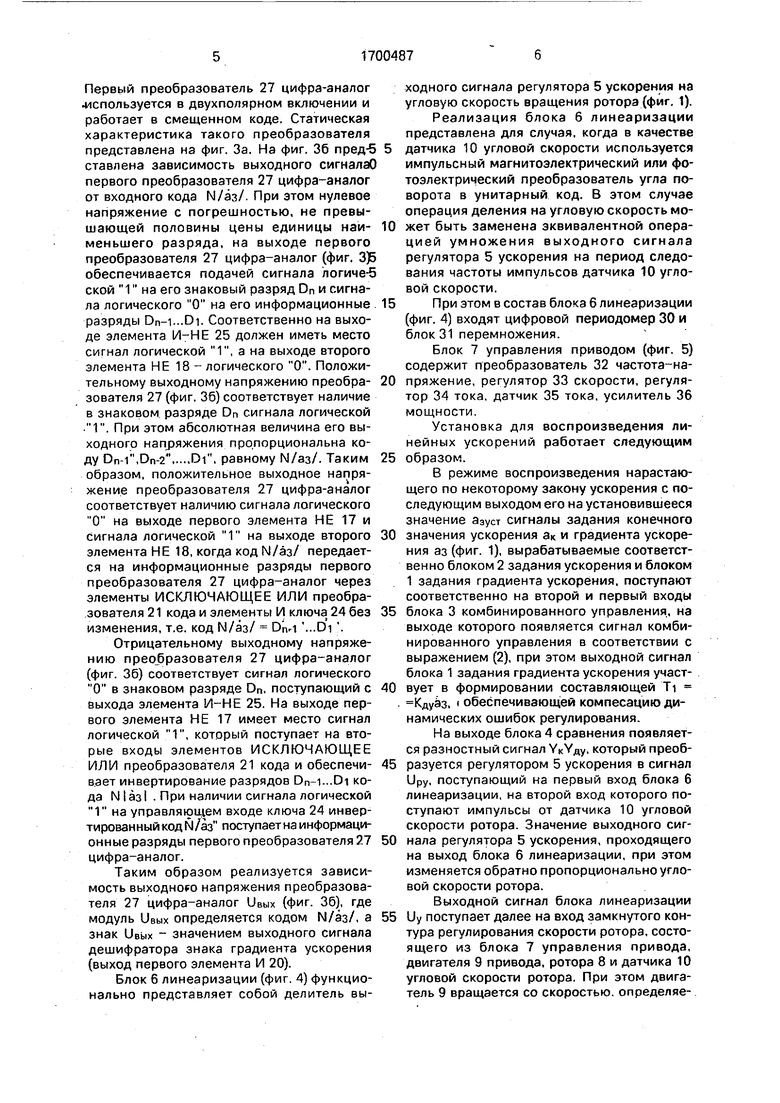
Первый преобразователь 27 цифра-аналог используется в двухполярном включении и работает в смещенном коде. Статическая характеристика такого преобразователя представлена на фиг. За. На фиг. 36 пред-5 ставлена зависимость выходного сигналаО первого преобразователя 27 цифра-аналог от входного кода N/аз/. При этом нулевое напряжение с погрешностью, не превышающей половины цены единицы наи- меньшего разряда, на выходе первого преобразователя 27 цифра-аналог (фиг. 3)5 обеспечивается подачей сигнала логиче-5 ской 1 на его знаковый разряд Dn и сигнала логического О на его информационные разряды Dn-i...Di. Соответственно на выходе элемента И-НЕ 25 должен иметь место сигнал логической 1, а на выходе второго элемента НЕ 18 - логического О. Положительному выходному напряжению преобра- зователя 27 (фиг. 36) соответствует наличие в знаковом разряде Dn сигнала логической .1. При этом абсолютная величина его выходного напряжения пропорциональна коду Dn-i,, равному N/аз/. Таким
образом, положительное выходное напряжение преобразователя 27 цифра-аналог соответствует наличию сигнала логического О на выходе первого элемента НЕ 17 и сигнала логической 1 на выходе второго элемента НЕ 18, когда код N/аз/ передается на информационные разряды первого преобразователя 27 цифра-аналог через элементы ИСКЛЮЧАЮЩЕЕ ИЛИ преобразователя 21 кода и элементы И клк 24 без изменения, т.е. код N/аз/ Diui ...Di .
Отрицательному выходному напряжению прео бразователя 27 цифра-аналог (фиг. 36) соответствует сигнал логического О в знаковом разряде Dn, поступающий с выхода элемента Л-НЕ 25. На выходе первого элемента НЕ 17 имеет место сигнал логической 1, который поступает на вторые входы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ преобразователя 21 кода и обеспечи- вает инвертирование разрядов Dn-i...Di кода N |аз . При наличии сигнала логической 1 на управляющем входе ключа 24 инвертированный код N/аз поступает на информационные разряды первого преобразователя 27 цифра-аналог.
Таким образом реализуется зависимость выходною напряжения преобразователя 27 цифра-аналог Увых (фиг. 36), где модуль Увых определяется кодом N/аз/, а знак Увых - значением выходного сигнала дешифратора знака градиента ускорения (выход первого элемента И 20).
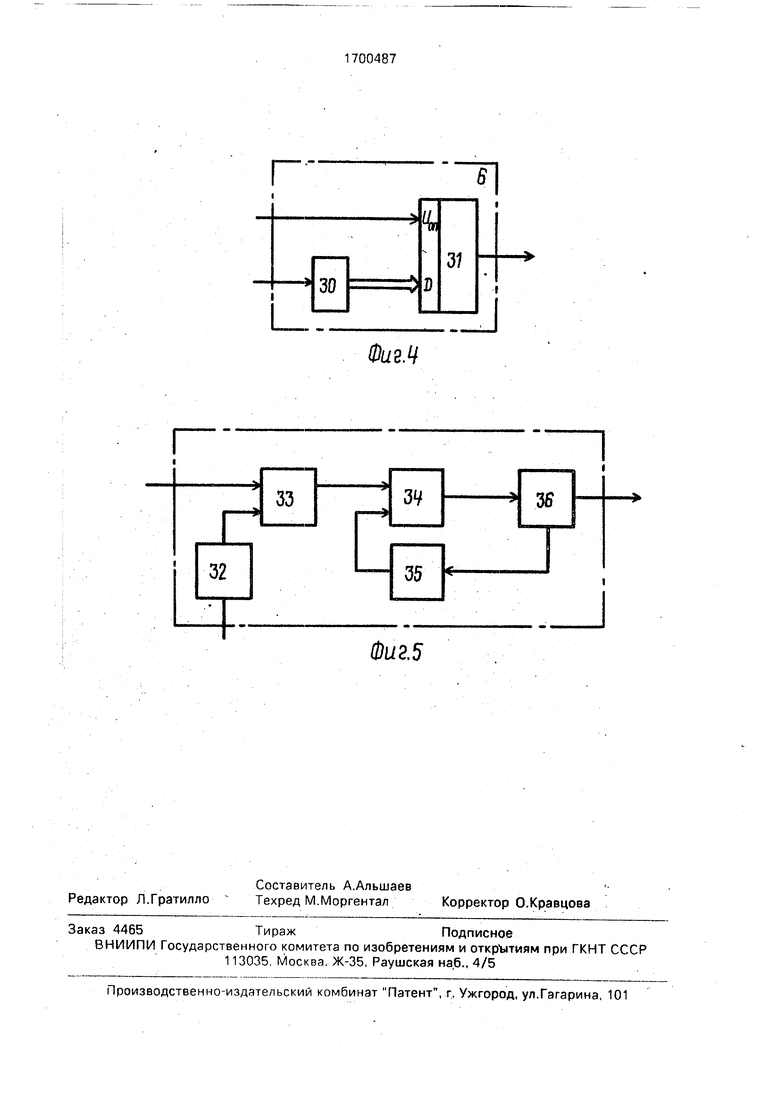
Блок 6 линеаризации (фиг. 4) функционально представляет собой делитель выходного сигнала регулятора 5 ускорения на угловую скорость вращения ротора (фиг. 1).
Реализация блока 6 линеаризации представлена для случая, когда в качестве датчика 10 угловой скорости используется импульсный магнитоэлектрический или фотоэлектрический преобразователь угла поворота в унитарный код. В этом случае операция деления на угловую скорость может быть заменена эквивалентной операцией умножения выходного сигнала регулятора 5 ускорения на период следования частоты импульсов датчика 10 угловой скорости.
При этом в состав блока б линеаризации (фиг. 4) входят цифровой периодомер 30 и блок 31 перемножения.
Блок 7 управления приводом (фиг. 5) содержит преобразователь 32 частота-напряжение, регулятор 33 скорости, регулятор 34 тока, датчик 35 тока, усилитель 36 мощности.
Установка для воспроизведения линейных ускорений работает следующим образом.
В режиме воспроизведения нарастающего по некоторому закону ускорения с последующим выходом его на установившееся значение аэуст сигналы задания конечного значения ускорения ак и градиента ускорения аз (фиг. 1), вырабатываемые соответственно блоком 2 задания ускорения и блоком 1 задания градиента ускорения, поступают соответственно на второй и первый входы блока 3 комбинированного управления, на выходе которого появляется сигнал комбинированного управления в соответствии с выражением (2), при этом выходной сигнал блока 1 задания градиента ускорения участвует в формировании составляющей TI КдУаз, обеспечивающей компесацию динамических ошибок регулирования.
На выходе блока 4 сравнения появляется разностный сигнал УкУДу, который преобразуется регулятором 5 ускорения в сигнал Upy, поступающий на первый вход блока 6 линеаризации, на второй вход которого поступают импульсы от датчика 10 угловой скорости ротора. Значение выходного сигнала регулятора 5 ускорения, проходящего на выход блока 6 линеаризации, при этом изменяется обратно пропорционально угловой скорости ротора.
Выходной сигнал блока линеаризации Uy поступает далее на вход замкнутого контура регулирования скорости ротора, состоящего из блока 7 управления привода, двигателя 9 привода, ротора 8 и датчика 10 угловой скорости ротора. При этом двигатель 9 вращается со скоростью, определявмой значением сигнала Uy. Значение воспроизводимого ускорения нарастает пропорционально квадрату угловой скорости, благодаря наличию блока 6 линеаризации воспроизводимое ускорение и выходные сигналы регулятора 5 ускорения и блока 3 комбинированного управления пропорциональны. Тем самым создается возможность компенсации динамической ошибки регулирования ускорения, а также обеспечивается устойчивая работа замкнутого контура ускорения во всем диапазоне. Например, в режиме воспроизведения линейно изменяющегося ускорения (аз const) воспроизводимое ускорение a(t) равно заданному значению аз(т,). При этом разность выходного сигнала YK блока 3 комбинированного управления и сигнала обратной связи по ускорению/с выхода бло- к|э 14 передачи информации дает на входе регулятора 5 ускорения постоянный сигнал Т1Кдуаз, который интегрируется регулято- 5 ускорения, В результате выходной сигнал регулятора 5 ускорения изменяется линейно. Благодаря наличию блока 6 линеаризации обеспечивается линейный закон изменения воспроизводимого ускорения a(t) с темпом аз. Если воспроизводимое ускорение a(t) из-за влияния возмущений отличается от аз (t), то за счет обратной связи пр ускорению на входе регулятора 5 ускоре- ния образуется дополнительный сигнал, воздействующий через регулятор 5 ускорения, блок 6 линеаризации и блок 7 управления приводом на Двигатель 9 таким образом, что ускорение возвращается к требуемому значению аз(т).
В конце переходного процесса as(t) Јэуст и установка работает в режиме стабилизации. При этом выходной сигнал блока 3 комбинированного управления Y« Зэуст Јonst. При отсутствии возмущений входной сигнал регулятора 5 ускорения равен
нулю, а его выходной сигнал постоянен. Если воспроизводимое ускорение под влиянием возмущений становится равным азуст, то на выходе блока 4 сравнения появляется разностный сигнал, не равный нулю, который воздействует на установку, проходя через регулятор 5 ускорения, блок б линеаризации, блок 7 управления приводом и двигатель 9 привода, возвращая ускорение к требуемому значению.
Таким образом, обеспечивается воспроизведение линейных ускорений в соответствии с его задаваемым значением. Формула изобретения
Установка для воспроизведения линейных ускорений, содержащая блок задания ускорений, блок сравнения, ротор с приводом, платформу для крепления испытуемого прибора и датчика воспроизводимого ускорения, выход которого через блок передачи информации соединен с вторым входом блока сравнения, и блок управления приводом, выход которого соединен с двигателем привода, отличающаяся тем, что, с
целью повышения точности, в нее введены блок задания градиента ускорения, блок комбинированного управления,, блок линеаризации, регулятор ускорения и датчик угловой скорости ротора, связанный с двигателем, при этом блок управления приводом выполнен с двумя входами, первый вход блока комбинированного управления соединен с выходом блока задания градиента ускорения, второй вход - с выходом
блока задания ускорения, а выход - с первым входом блока сравнения, выход которого через регулятор ускорения соединен с первым входом блока линеаризации, выход которого соединен с первым входом
блока управления приводом, а вторые входы блоков управления приводом и линеаризации соединены с выходом датчика угловой скорости ротора.
эязн
f-Щт ги
о Lu-t uauff ру г и Q-QO{
г-иа
imufl Х чдп g
WZ7W
О
JVDWJ7
Щп
«
Г
г
ФигМ
Фи2.5
| Центрифуга | 1979 |
|
SU854454A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Установка для воспроизведения ускорений | 1982 |
|
SU1062616A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
