(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕЖКЛЕТЕВЫХ НАТЯЖЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения межклетевых натяжений | 1982 |
|
SU1045972A2 |
| Устройство для регулирования межклетевых натяжений | 1978 |
|
SU764759A1 |
| Устройство для регулирования межклетевых натяжений | 1979 |
|
SU880532A2 |
| Устройство для регулирования межклетевых натяжений | 1984 |
|
SU1174112A1 |
| Устройство для регулирования межклетьевых натяжений | 1980 |
|
SU930811A1 |
| Устройство стабилизации ширины полосы на станах горячей прокатки | 1974 |
|
SU534265A1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Устройство стабилизации натяжения проката на непрерывном стане | 1986 |
|
SU1397110A1 |
| Устройство для измерения межклетевого натяжения проката | 1985 |
|
SU1247114A1 |
| Устройство для измерения межклетевых натяжений проката | 1982 |
|
SU1039600A1 |
I
Изобретение относится к агтоматизации прокатного производства и может быть применено для измерения межклетезых натяжений с последующим регули- с рованием соотношения скоростей непрерывных групп клетей станов горячей прокатки без петлеобразования.
Известно устройство для измерения и последующего регулирования межкле- JQ тевых натяжений по разности статических моментов, измеренных в каждой клети до и после захвата металла последующей клетью |Д .
Наиболее близким к изобретению 15 по технической сущности и достигаемому эффекту является устройство управления межклетевым натяжением - сжатием, содержащее датчики скорости, тока якоря и возбуждения главных 20 приводов клетей, блок вычисления статических моментов, входы которого соединены с выходами указанных датчиков, а выход - со входом реле, интегратор, вход которого соединен с 25 выходом датчика скорости, пороговый элемент, вход которого соединен с выходом интегратора, а выход - со входом другого реле, блок измерения разности моментов, причем интегратор 30
шунтирован нормально замкнутыми контактами первого реле f 2 .
Недостатком этих устройств является наличие погрешности в измерении разности статических моментов при низкочастотных колебаниях момента привода, например, вследствие эксцентриситета валков, которые не могут быть устранены применением специальных фильтров, так как последние резко снижают быстродействие устройства.
Цель изобретения - повышение точности измерения разности статических моментов при нгшични низкочастотных колебани-й момента, например, вследствие эксцентриситета аалков.
Указанная цель достигается тем, что в устройство, содержащее датчики скорости, тока якоря и возбузедения главных приводов клетей, блока вычисления статических моментов, входы которого соединены с выходс1ми указанных датчиков, а выход - со входом первого реле, интегратор, вход которого соединен с выходом датчика скорости, пороговый элемент, вход которого соединен с выходом интегратора, а вы-.ход - со входом втородО реле, блок измерения разности моментов, причем
нтегратор шунтирован нормально замнутыми контактами первого реле, доолнительно введен блок измерения аксимсшьного момента, вход которого оединен с выходом блока вычисления татических моментов, а выход - со ходом блока измерения разности моентов.
При этом блок измерения максимгшьного момента содержит первый интегратор, выход которого соединен с одним из входов первого, второго и третьего сумматоров, другой вход второго сумматора, являющийся входом блока, соединен со вторым входом третьего сумматора, третий вход которого соеинен с выходом второго интегратора и вторым входом первого сумматора, вход первого интегратора через диод соединен с выходом второго сумматора, вход второго интегратора соединен через диод с выходом третьего сумматора, выход первого сумматора является выходом блока, интеграторы шунтированы нормально замкнутыми контактами реле на выходе блока вычисления статических моментов, а также последовательно соединенными нормально открытыми контактами реле на выходе порогового элемента и нормально замкнутыми контактами реле на выходе блока вычисления момента привода последующей клети.
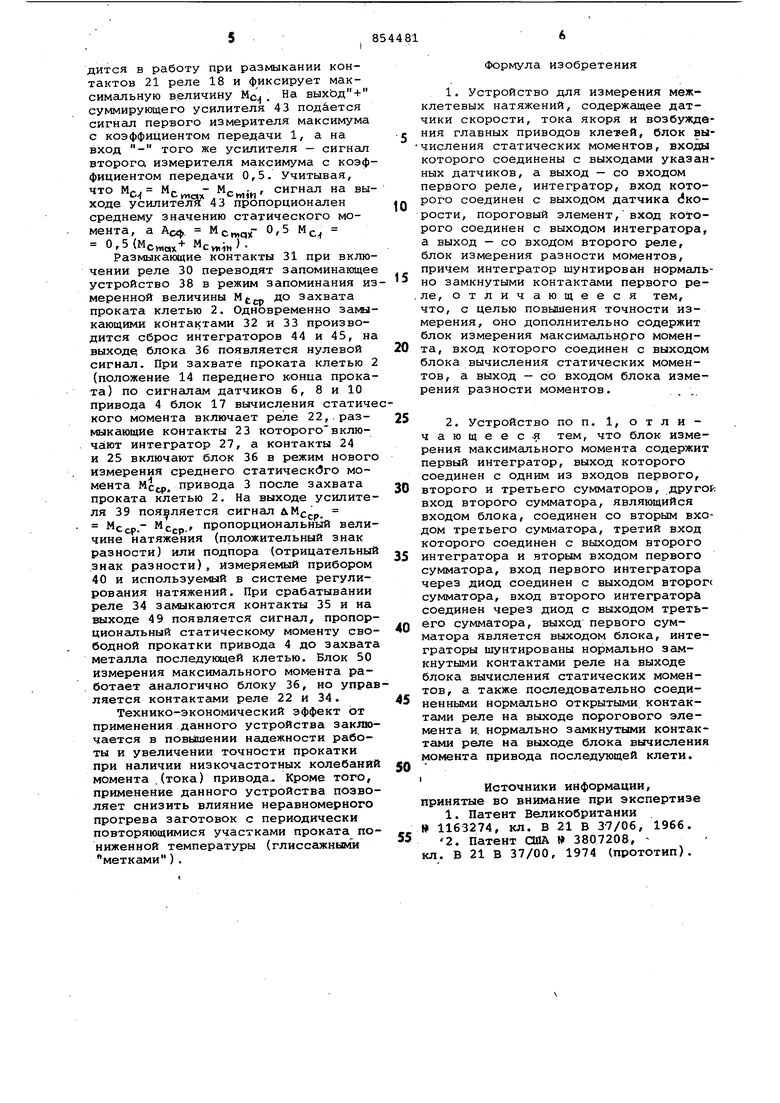
На фиг. 1 изображена схема устройства, на фиг. 2 - блок измерения максимс1Льного момента.
Клети 1 и 2, входящие в непрерывную группу, имеют главные приводы 3 и 4 постоянного тока, снабженные датчиками 5 и б тока якоря, датчиками 7 и 8 скорости главных приводов, датчиками 9 и 10 тока возбуждения. Поступающий в клети прокат 11 имеет следующие характерные положения переднего конца: сечение 12 после захвата клетью 1, сечение 13 перед захватом клетью 2/ сечение 14 после захвата клетью 2; сечение 15 перед захватом последующей клетью. Устройство содержит также блоки 16 и 17 вычисления статического момента приводов клети, реле 18 с контактами 1921, реле 22 с контактами 23-25, интеграторы 26 и 27, пороговые устройства 28 и 29, реле 30 с контактами 31-33, реле 34 с контактами 35, блок 36 измерения максимального момента, .блок 37 измерения разности моментов, состЬящий из запоминающего устройства 3 и операционного усилителя 39. Индикация величины натяжения производится прибором 40. Блок 36 измерения максимального момента сос«оит из суммирующих операционных усилителей 41-43, интеграторов 44 и 45 и диодов 46 и 47. Блок 36 измерения максимального момента состоит из измерителя максимума входного сигнала, собранного на элементах 41, 44 и 46,
измерения максимума разности максимального и текущего значений входного сигнала, собранного на элементах 42, 45 и 47, и суммирукадего усилителя 43. Суммирующий операционный усилитель 48 используется в случае необходимости измерения натяжения в следующем межклетевом промежутке, его выход 49 подключен ко входу измерителя разности статических мо-. ментов привода 4 до и после захвата проката последующей клетью (не показан) . Блок 50 измерения максимгшьного момента для второго межклетевого промежутка аналогичен блоку 36.
Устройство работает следующим образом.
При захвате проката 11 (положение 12 его переднего конца)клетью 1 по сигналу блока 16 вычисления статического момента привода 3 включается реле 18. Выходной сигнал блока 16 формируется по известному выражению dqi)
с
с помощью сигdt
налов датчиков 5 тока якоря датчика скорости (Л), датчика 9 тока возбуждения Ig, причем последний сигнал проходит через нелинейный функциональный преобразователь, реализующий кривую намагничивания 4 f(Ig), а сигнал скорости ои дифференцируется. Для сглаживания высокочастотных коле.баний входных величин в блоке 16 вычисления статического момента предусматривается фильтр. В случае нере гулируемого потока возбуждения необходимость в датчике 9 тока возбуждения отпадает, и выходной сигнгш блока 16 вычисления статического момента пропорционален также статическому току.
в момент срабатывания реле 18 размыкаются контакты 19, на выходе интегратора 26 появляется напряжение, которое достигает величины срабатывания порогового устройства 28 в положении 13 переднего конца проката, после чего включается реле 30. В связи с тем, что входным сигналом интегратора 26 является выход датчика 7 скорости, срабатывание реле 30 в положении 13 проката сохраняется при любой скорости прокатки.
Выходной сигнал блока 16 вычисления статического момента поступает также на вход блока 36 измерения максимального момента, который вводится в режим измерения размыкающимися контактами. 20 и 21 реле 18. Измеритель максимума входного сигнала, собранный на элементах 41, 44 и 46, вводится в работу при раз мкании контактов 20 реле 18 и фиксирует максимальную величину М статического момента. Измеритель максимума разности максимального и текущего значений входного сигнала, собранный на элементах 42, 45 и 47, вводится в работу при размыкании контактов 21 реле 18 и фиксирует максимальную величину MC . На выход + суммирующего усилителя 43 подается сигнал первого измерителя максимума с коэффициентом передачи 1, а на вход - того же усилителя - сигнал второга измерителя максимума с коэффициентом передачи 0,5. Учитывая, что MC ,- сигнал на выходе усилителя 43 пропорционален среднему значению статического момента, а АС, 0,5 MC 0, ).
Размыкающие контакты 31 при включении реле 30 переводят запоминающее устройство 38 в режим запоминания измеренной величины до захвата проката клетью 2. Одновременно заликающими контактами 32 и 33 производится сброс интеграторов 44 и 45, на выходе, блока 36 появляется нулевой сигнал. При захвате проката клетью 2 (положение 14 переднего конца проката) по сигналс1м датчиков 6, 8 и 10 привода 4 блок 17 вычисления статичекого момента включает реле 22,.размыкающие контакты 23 котороговключают интегратор 27, а контакты 24 и 25 включают блок 36 в режим нового измерения среднего статического момента Мсср. привода 3 после захвата проката клетью 2. На выходе усилителя 39 появляется сигнал Л-К К - MC , пропорциональный величине натяжения (прложительный знак разности) или подпора (отрицательный знак разности), измеряемый прибором 40 и используе ый в системе регулирования натяжений. При срабатывании реле 34 замыкаются контакты 35 и на выходе 49 появляется сигнгш, пропорционёигьный статическому моменту свободной прокатки привода 4 до захвата металла последуюдей клетью. Блок 50 измерения максимального момента работает аналогично блоку 36, но управляется контактами реле 22 и 34.
Технико-экономический эффект от применения данного устройства заключается в повышении надежности работы и увеличении точности прокатки при наличии низкочастотных колебаний момента .(тока) привода.. Кроме того, применение данного устройства позволяет снизить влияние неравномерного прогрева заготовок с периодически повторяющимися участками проката пониженной температуры (глиссажными метками).
Формула изобретения
5
0 второго и третьего сумматоров, другоР; вход второго сумматора, являющийся входом блока, соединен со вторым входом третьего cyMtviaTOpa, третий вход которого соединен с выходом второго
5 интегратора и вторым входом первого сумматора, вход первого интегратора через диод соединен с выходом второгс сумматора, вход второго интегратора соединен через диод с выходом третьего сумматора, выход первого сум0матора является выходом блока, интеграторы шунтированы нормально замкнутыми контактами реле на выходе блока вычисления статических моментов, а также последовательно соеди5ненными нормально открытыми контакТс1ми реле на выходе порогового элемента и. нормально замкнутыми контактами реле на выходе блока вычисления момента привода последующей клети.
0
Источники информации, принятые во внимание при экспертизе
5
