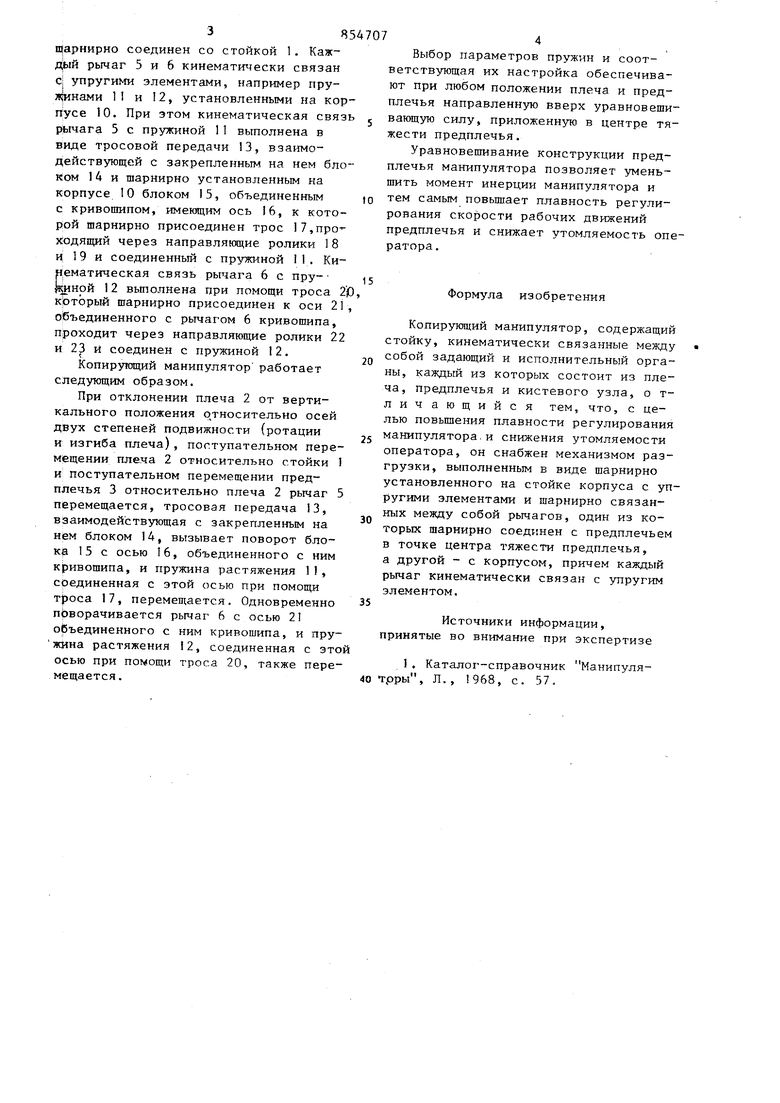
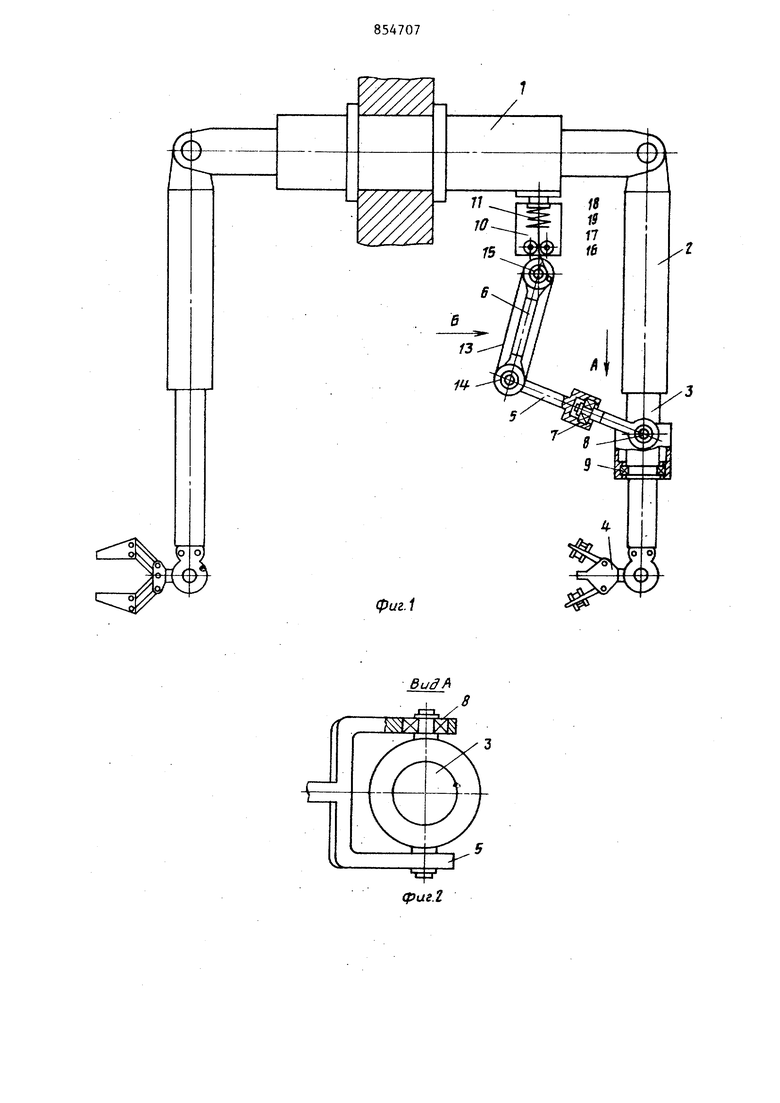
(54) КОПИРУНЩИЙ МАНИПУЛЯТОР Изобретение относится к машиностро ению, а именно к промьшшенным роботам и манипуляторам. Известен копирующий манипулятор, содержащий стойку, кинематически связанные между собой задающий и исполнительный органы, каждый из которых состоит из плеча, предплечья и кистевого узла . Недостатком данного манипулятора является то, что его предплечье урав новешено при помощи установленного на нем противовеса, что снижает плавность регулирования скорости перемещения манипулятора и ухудшает условия работы оператора. Цель изобретения - повышение плавности регулирования манипулятора и снижение утомляемости оператора. Цель достигается тем, что манипуля тор снабжен механизмом разгрузки, выполненным в виде шарнирно установленного на стойке корпуса с упругими эле ментами и шарнирно связанных неязду собой рычагов, один из которых шарнирно соединен с предплечьем в точке центра тяжести предплечья, а другой с корпусом, причем каядый рычаг кинеМатически связан с упругим элементом. На фиг. I схематически изображен кинематический манипулятор, общий вид; на фиг. 2 - вид А на фиг. I (в масштабе); на фиг. 3 - вид Б на фиг, I; на фиг. 4 - вид В на фиг. 3. Уравновешенный манипулятор содержит стойку 1, плечо 2, соединенное со стойкой 1 при помощи поступательной пары и двухосного шарнира предплечье 3, соединенное с плечом 2 при помощи поступательной пары,и кистевой узел 4. На манипуляторе установлены шарнирно соединенные рычаги 5 и б при этом конец рычага 5 соединен с центром тяжести предплечья 3 при помощи трех шаршфов 7, 8 и 9 л конец рычага 6 шарнирно соедннен с кор пусом 10, KoropoKt в свою очередь. 38 щарнирно соединен со стойкой 1. Кажд 1Й рычаг 5 и 6 кинематш1ески связан с упругими элементами, например прул нами II и 12, установленными на кор rtyce 10, При этом кинематическая связ рьгчага 5 с пружиной 1 1 выполнена в виде тросовой передачи 3, взаимодействующей с закрепленным на нем бло ком 14 и шарнирно установленным на корпусе 10 блоком 15, объединенным с кривошипом, имеющим ось 16, к которой шарнирно присоединен трос 17,проходящий через направлякядие ролики 18 и; 19 и соединенный с пружиной 11. Ки яематическая связь рычага 6 с пру{ инрй 12 выполнена при помощи троса 2 который щарнирно присоединен к оси 2I объединенного с рычагом 6 кривошипа, проходит через направляющие ролики 22 и 23 и соединен с пруясиной 12. Копирующий манипулятор работает следующим образом. При отклонении плеча 2 от вертикального положения относительно осей двух степеней подвижности {ротации и изгиба плеча), поступательном перемещении пле.ча 2 относительно стойки I и поступательном перемещении предплечья 3 относительно плеча 2 рычаг 5 перемещается, тросовая передача 13, взаимодействующая с закрепленным на нем блоком 14, вызывает поворот блока 1 5 с осью 16, объединенного с ним кривошипа, и пружина растяжения 11, соединенная с этой осью при помощи троса 17, перемещается. Одновременно поворачивается рычаг 6 с осью 21 объединенного с ним кривошипа, и пружина растяжения 12, соединенная с это осью при помощи троса 20, также перемещается. Выбор параметров пружин и соответствующая их настройка обеспечивают при любом положении плеча и предплечья направленную вверх уравновешивающую силу, приложенную в центре тяжести предплечья. Уравновешивание конструкции предплечья манипулятора позволяет уменьшить момент инерции манипулятора и тем самым повьштает плавность регулирования скорости рабочих движений предплечья и снижает утомляемость оператора. Формула изобретения Копирующий манипулятор, содержащий стойку, кинематически связанные между собой задающий и исполнительный органы, каждый из которых состоит из плеча, предплечья и кистевого узла, о тличающийся тем, что, с целью повышения плавности регулирования манипулятора.и снижения утомляемости оператора, он снабжен механизмом разгрузки выполненным в виде щарнирно установленного на стойке корпуса с упругими элементами и шарнирно связанных между собой рычагов, один из которых шарнирно соединен с предплечьем в точке центра тяжести предплечья, а другой - с корпусом, причем каждый кинематически связан с упругим элементом. Источники информации, принятые во внимание при экспертизе 1, Каталог-справочник Манипулятрры. Л., 1968, с. 57.
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU854708A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Модуль промышленного робота | 1980 |
|
SU1047677A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |
10
nir
видб
р1/г.З
фигЛ
