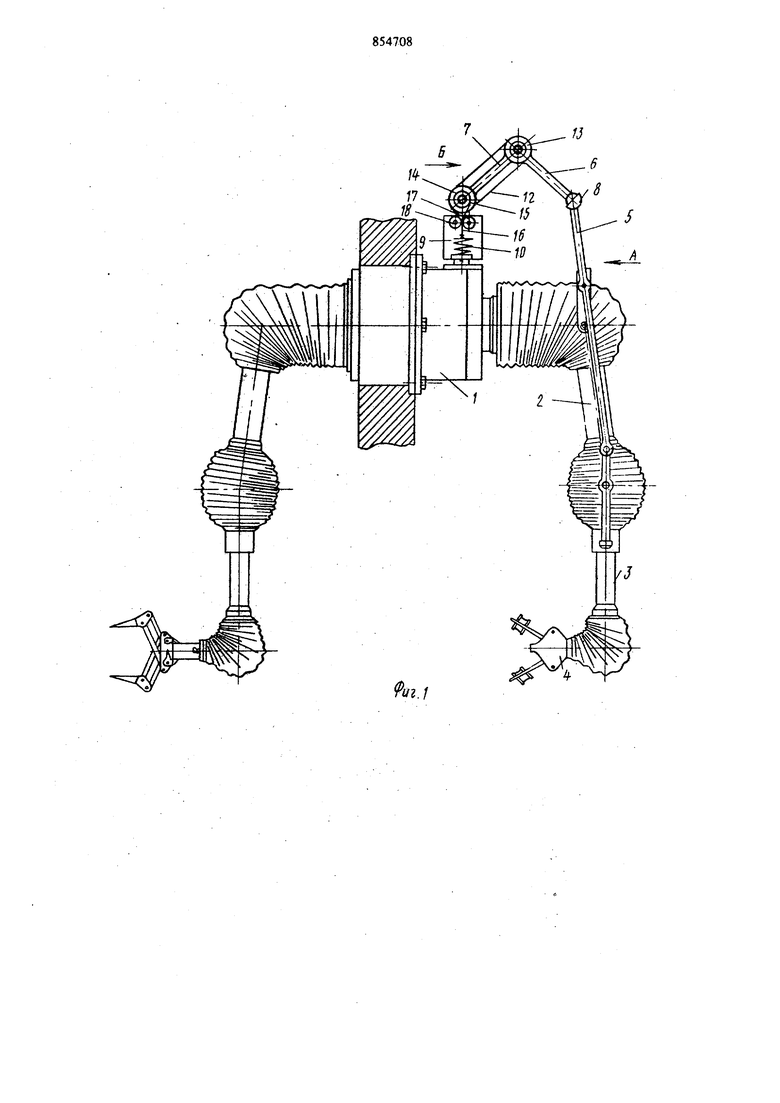
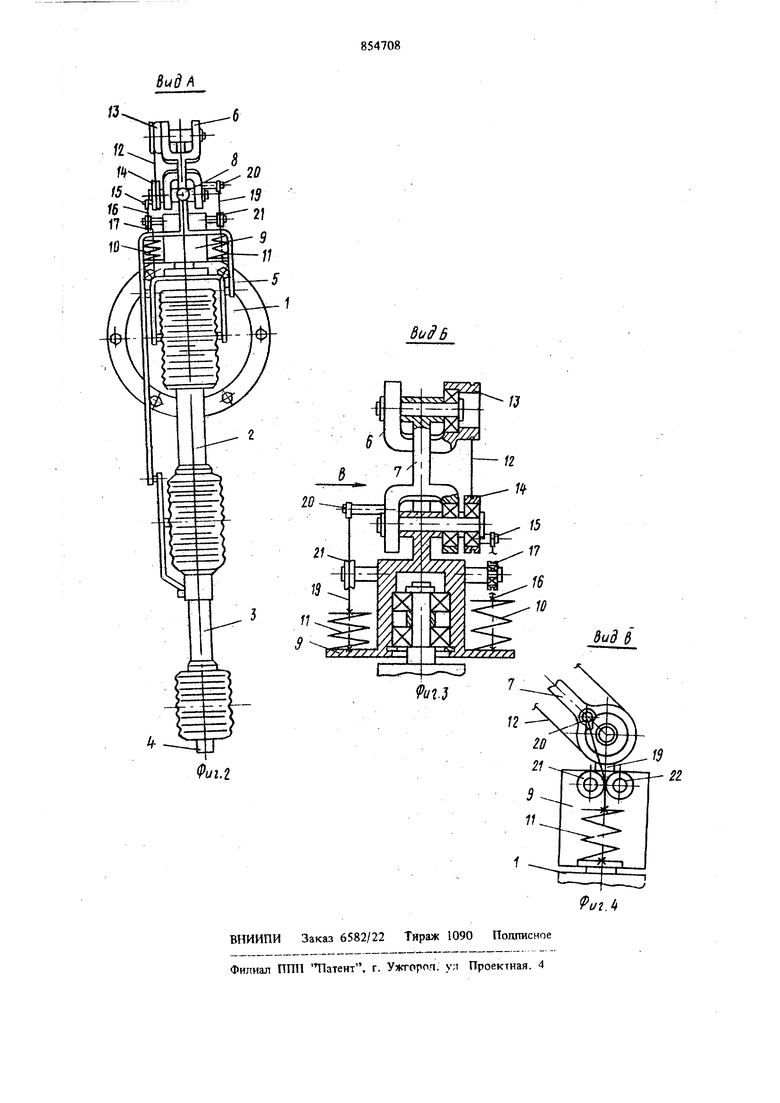
Изобретение относится к машинострюению, а именно к промышленным роботам и манипуляторам. Известен копирующий манипулятор, содержаишй стойку, кинематически связанные между собой исполнительный и задающий органы, состоящие из плеча, предплечья и кистевого уз ла, а также механизм пантографа, связанный с плечом и предплечьем задающего органа II. Недостатком данного манипулятора является то, что плечо и предплечье задающего органа уравновещены при помощи закрепленного на механизме пантографа противовеса, что снижает плавность регулирования скорости перемещения манипулятора и ухудщает условия работы оператора. Цель изобретения - повышение плавности регулирования скорости перемещений манипулятора и снижение утомляемости оператора. Цель достигается тем, что манипулятор снабжен механизмом разгрузки, выполненным в виде шарнирно установленного на стойке корпуса с упругими гшементами и шаркирно связанных между собой рычагов, один Из которых шарнирно соединен с механизмом пантографа, а другой - с корпусом, причем каждый рычаг К1шематкчески связан с упругим элементом. На фнг. 1 схематически изображен копирующий манипулятор, общий вид; на фиг. 2 вид А на фиг. 1; на фиг. 3 - вид Б на фиг. I на mapHHpFio соедине1тые рычаги; на фиг. 4 вид В на фнг. 3 на рычаг, шарнирно соединенный с корпусом. Копирующий манипулятор содержит стойку 1, плечо 2, предплечье 3, кистевой узел 4 и механизм пантографа 5, щарнирно соешшеиный с плечом и предплечьем задающего органа. На манипуляторе устаиовлень шарнирно соединенные рычаги 6 и 7, при этом конец рьпага 6 соединен при помощи трехосного шарнира 8 с механизмом пантографа 5, а конец рычага 7 щарнирно соедашен с корпусом 9, который, в свою очередь, шарнирно соединен со стойкой 1. Каждый рычаг 6 и 7 кинематически связан с упругим элеме1ггом, например пружинами 10 и 11, соответственно установленными на корпусе 9. При этом кинематическая связь рычага 6 с пружиной 10 выполнена в ввде тросовой
передачи 12, взаимодействующей с закрепленribiM на нем блоком 13 и шарнирно установленным на корпусе 9 блоком 14, объеди 1ет1ым с кривошипом, имеющим ось 15, к которой шарнирно присоединен трос 16, проходящий через направляющие ролики 17 и 18 и соединенный с пружиной 10. Кинематическая связь рычага 7 с пружиной 11 выполнена при помощи троса 19, который щарнирно присоединен к оси 20 кривошипа, объединенного с рычаriOM 7, проходит через направляющие ролики 21 и 22 и соединен с пружиной П.
Копирующий манипулятор работает следутощим образом.
При отклонении плеча 2 и предплечья 3 от вертикального положения относительно осей трех степеней подвижности (ротадии изгиба Ллеча и изгиба предплечья) происходит поворот соединенного с ними механизма пантографа 5. Прл этом соединетгшлй с механизмом Пантографа 5 при помощи трехосного щарнира 8 рычаг 6 перемещается, тросовая передача 12, взаимодейству дощая с закрепленным на нем блоком 13, вызывает поворот блока 14 с осью 15, объединенного с ним кривощипа, пружина растяжен1гя 10, соединенная с этой осью при помощи троса 16, перемещается. Одновременно Поворачивается рычаг 7 с осью 20 объединенного с ним кривошипа, и пружина растяжения 1, соединенная с этой осью при помощи троса 19, также перемещается.
Выбор параметров пружин и соответствующа их настройка обеспечивают при любом положении плеча и предплечья риправленную вниз
уфавновепшвающую силу, приложенную в центре трехосного щарнира, соединенного с механизмом пантографа.
Пружинное уравновещивание конструкции плеча и предплечья позволяет уменьижть момент инерции манипулятора и тем самым повыщает плавность регулирования скорости рабочих движений плеча и предплечья и снижает утомляемость оператора.
Формула изобретения
Копирующий манипулятор, содержащий стойку, кинематически связанные между собой исполнительный и задающей органы, состоящие из плеча, предплечья и кистевого узла, а также механизм пантографа, связанный с плечом и предплечьем задающего органа, отличающийся тем, что, с целью повышения плавности регулирования скорости перемещения манипулятора и снижения утомляемости оператора, он снабжен механизмом разгрузки, выполненным в виде щарнирно установленного на стойке корпуса с упругими элементами и шарнирно связшшых между собой рычагов, одни из которых щарнирно соединен с механизмом пантографа, а другой - с корпусом, причем каждый рычаг кинематически связан с упомянутым упругим элементом.
Источники шформашш, пр1шятые-во внимание при экспертизе
I. Каталог-справочник Манипуляторы, Л., 1968, с. 101.
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU854707A1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР ДЛЯ ИСПОЛЬЗОВАНИЯ НА БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2019 |
|
RU2712972C1 |
| МЕХАНИЧЕСКИЙ АНТРОПОМОРФНЫЙ МАНИПУЛЯТОР | 2022 |
|
RU2803482C1 |
| Задающий орган манипулятора | 1979 |
|
SU895639A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Манипулятор | 1987 |
|
SU1521588A1 |