Изобретение относится к машиностроению и может быть использовано в роботах и манипуляторах. Известна рука манипулятора, содержащая основание, подвижную опору, шарнирно сочлененные звенья плеча и предплечья с прииводом, поворота этих звеньев и пружинные разгрузочные устройства плеча и предплечья, которые оснащены опорными роликами и гибкими элементами, проходящими через них. Пружины этих устройств одним концом соединены с подвижной опорой, а другим -с гибким элементом, причем один гибкий элемент соединен с плечом-, а другой через кривощип, установленный на оси поворота плеча, связан с предплечьем через механическую передачу, которая выполнена в виде системы цилиндрических колес и перекрестной гибкой передачи. В этом устройстве для повыщения точности уравновёщивания элементов конст рукции на кривощипе и плече установлены дополнительные ролики, охватываемые гибкими элементами, ветви которых соединены с пружинами 1. Недостатками данного устройства являются наличие двух уравновешивающих средств, а соответственно и двух устройств для уравновешивания плеча и предплечья, передача силы уравновешивающего средства и управляющего воздействия на предплечье через гибкую связь, что приводит при учете податливости связи к увеличению рассогласования между положениями предплечья и вала его привода, сила уравновешивающего средства плеча приложена вблизи оси поворота плеча и не компенсирует его изгибные деформации, обусловленные силами тяжести. Наиболее близкой к изобретению является рука манипулятора, содержащая шарнирно связанные предплечье и плечо в виде шарнирного параллелограмма, две параллельные тяги которого шарнирно связаны с основанием, уравновещивающее средство, гибкий элемент, один конец которого , а n.pv. . jpc.oov.o. зан с предплечьем, а второй с уравновещивающим средством, и три направляющих ролика для гибкого элемента 2. Однако известное устройство уравновешивает только предплечье и не уравновешивает плечо, так как в любом положении системы момент уравновещивающей силы уравновешивающего средства относительно оси плеча компенсирует только момент от реакции тяги относительно плеча и момент уравновешиваемой силы предплечья относительно оси предплечья, что вытекает из последовательного рассмотрения условий равновесия систем предплечье-рычаг и плечо-предплечье-рычаг. Цель изобретения - повышение точности позиционирования за счет более полной уравновешенности плеча и предплечья. Поставленная цель достигается тем, что рука манипулятора, содержащая щарнирно связанные предплечье и плечо в виде шарнирного параллелограмма, две параллельные тяги которого шарнирно связаны с основанием, уравновешивающее средство,, гибкий элемент, один конец которого связан с предплечьем, а другой - с уравновешивающим средством, и три направляющих ролика для гибкого элемента, снабжена V -образным кронштейном, жестко связанным с рычагом шарнирного параллелограмма, примыкающим к предплечью, а два направляющих ролика расположены на концах кронщтейна так, что огибающий их гибкий элемент проходит через ось шарнирной связи предплечья с плечом, при этом третий направляющий ролик расположен на основании. На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 - схема сил, приложенных к руке манипулятора. Рука манипулятора (фиг. 1) имеет связанные предплечье 1 и плечо, выполненное в виде шарнирного параллелограмма ABCD, две параллельные тяги 2 и 3 которого шарнирно связаны с основанием 4 и рычагом 5, с которым жестко соединен V-образный кронштейн, 6, уравновешивающее средство 7, гибкий элемент 8, один конец которого связан с предплечьем 1, а второй - с уравновещивающим средством 7, и три направляющих ролика 9-11. Ролик 9 может вращаться вокруг оси Е, неподвижной в системе стойки параллелограмма, а оси роликов 10 и 11 расположены на V-образном кронштейне 6. Гибкий элемент 8 переброшен через ролики 9-11 (фиг. 1), причем ролик 11 расположен так, что гибкий элемент, огибающий его поверхность. проводит через точку В, являющуюся осью шарнирной связи плеча с предплечьем 1. Уравновешивающее средство 7 действует на конец гибкого элемента 8, создавая его натяжение с силой Р. Силами, подлежащим уравнрвешиванию, являются силы Gt,..Gz,..G3,..G5 .и пара сщ с моментом М, - вес предплечья 1 и схвата; соответственно веса звеньев 2,3 и 5; М - момент от сил тяжести схвата (не показан) относительно оси Н его поворота по отношению к предплечью. Этот момент постоянный, в частности, он может быть равным нулю. Он постоянен в случае, ecли движeнJнe схвата поступательно. Силы Gi,..Gz, G, .(JB ..(фиг. 2) приложены в соответствующих центрах Sj,..S,,..S3,..H 85 тяжести, причем точка S .представлена как центр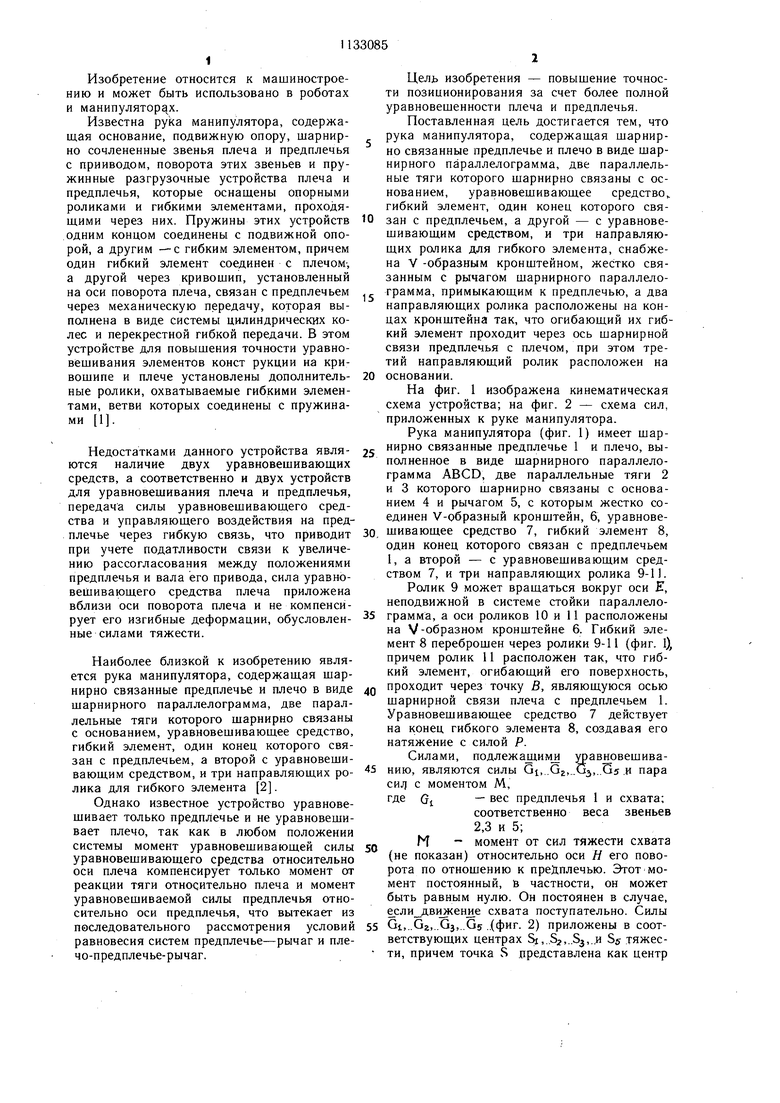

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085805A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| Манипулятор | 1983 |
|
SU1106652A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУКИ | 2019 |
|
RU2720744C1 |
| Манипулятор | 1982 |
|
SU1065184A1 |
РУКА МАНИПУЛЯТОРА, содержащая шарнирно связанные предплечье и плечо в виде шарнирного параллелограмма, две параллельные тяги которого шарнирно связаны с основанием, уравновешиваюпхее средство, гибкий элемент, один конец которого связан с предплечьем, а другой - с уравновешивающим средством, и три направляющих ролика для гибкого элемента, отличающаяся тем, что, с целью повышения точности позиционирования, она снабжена Y-образным кронштейном, жестко связанным с рычагом параллелограмма, примыкающим к предплечью, а два направляющих ролика расположены на концах кронштейна так, что огибающий их гибкий элемент проходит через ось шарнирной связи предплечья с плечом, при этом третий направляющий ролик расположен на основании. оо 00 о 00 СП
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рука манипулятора | 1979 |
|
SU874332A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
