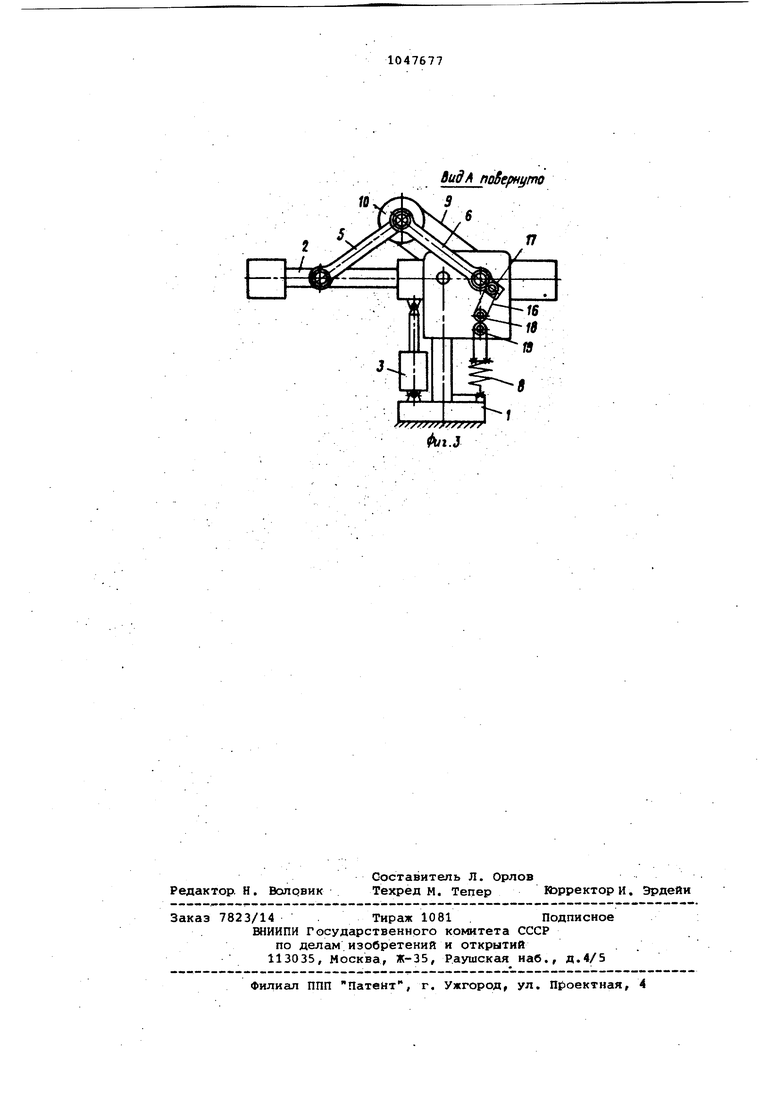
Изобретение относится к мёшганостроению, а именно к промышленным роботам и манипуляторам. Известен модуль промьтшенного ро бота, содержащий основание, кинематически связанные с подвижным звеном вращательную и поступательную па ры и их приводы tl. Однако известное устройство уравновешено при помощи связанной с основанием дополнительной поступательной пары, имеклцей привод, соединенны с клапаном, конт{5олирующим направление перемещения, и переключателем давления. Наличие этих дополнительны злементов увеличивает энергдзатраты и усложняет систему управления. Цель изобретения -t снижение энергозатрат и упрощение управления промышленного робота. Поставленная цель достигается тем что робот снабжен закрепленными на подвижном звене осями, пружинами, закрепленными на основании, и двумя парами рычагов, шарнирно соединенных общей осью, концы одной пары рычагов кинематически связаны с основанием блочной системой и подпружинены, концы другой пары рычагов шарйирно соединены с подвижным звеном, причем ось этого шарнирного соединения проходит через центр тяжести подвижного звена. На фиг. 1 изображен модуль про1«лишенного робота, вид спереди; на фиг. 2 - то же,вид сверху; на фиг. 3 - вид А на фиг. 2. Модуль промлаленного робота содер жит основание 1, соединенное с подвижным звеном 2 вращательной парой с приводом 3 и поступательной парой с приводом 4. На модуле пром;лапенного ро.бота установлены две пары шарнирно соединенных рычагов 5 и 6. КЬнец рычагов 5 шарнирно соединен с подвижным звеном 2, причем ось шарни ра проходит через центр тяжести подвижного звена, а концы рычагов 6 кинематически связаны с пружинами, соответственно 7 и 8, установленными на основании 1. 1 инематическая связь рычага 5 с пружиной 7 выполнена в виде тросовой передачи 9, взаимодействующей с закрепленным на этом рычаге блоком 10 и шарнирно установ ленным на основании 1 блоком 11, объединенным с кривошипом, имеющим ось 12, к которой шарнирно присоединена тросовая передача 13, проходящая через направляющие ролики 14 и 15 и соединенная с пружиной 7. Ю1нематическая связь рычага 6 с пружиной 8 выполнена в виде тросовой передачи 16, которая шарнирно присоединена к оси 17 кривошипа, объединенного, с рычагом 6, проходит через иаправляющие ролики 18 и 1.9 и соединена с пружиной 8. Модуль промьвилеиного робота работает следующим образом. При подаче сигналов управления на привода 3 и 4 вращательной и поступательной пар подв1|;кное звено 2 перемещается. Рычаги 5 приходят в движение, тросовая передача 9, взаимодействующая с закрепленным на одном из рычагов блоком 10, вызывает поворот блока 11с осью 12 объединенного с ним кривошипа. Соединенная с кривошипом при помощи тросовой передачи 13 пружина 7 растяжения перемещается. Одновременно поворачивается рычаг 6 с осью 17 объединен- ного с ним кривсииипа.Соединенная с этим кривошипом при помощи тросовой передачи 16 пружина растяжения 8 также перемещается. Выбор параметров пружин и соответствующая их настройка обеспечивают при любом положении подвижного звена уравновешивающую силу Q,приложенную в его центре тяжести, равную его. весу G и противоположно направленную. Пружинное .уравновешивание конструкции модуля промыиленного робота позволяет устранить дополнительную поступательную пару с приводом, клапаном и переключателем давления и тем сгцуым снизить энергозатраты и упростить систему управления.
Вид А noSepHnmo 3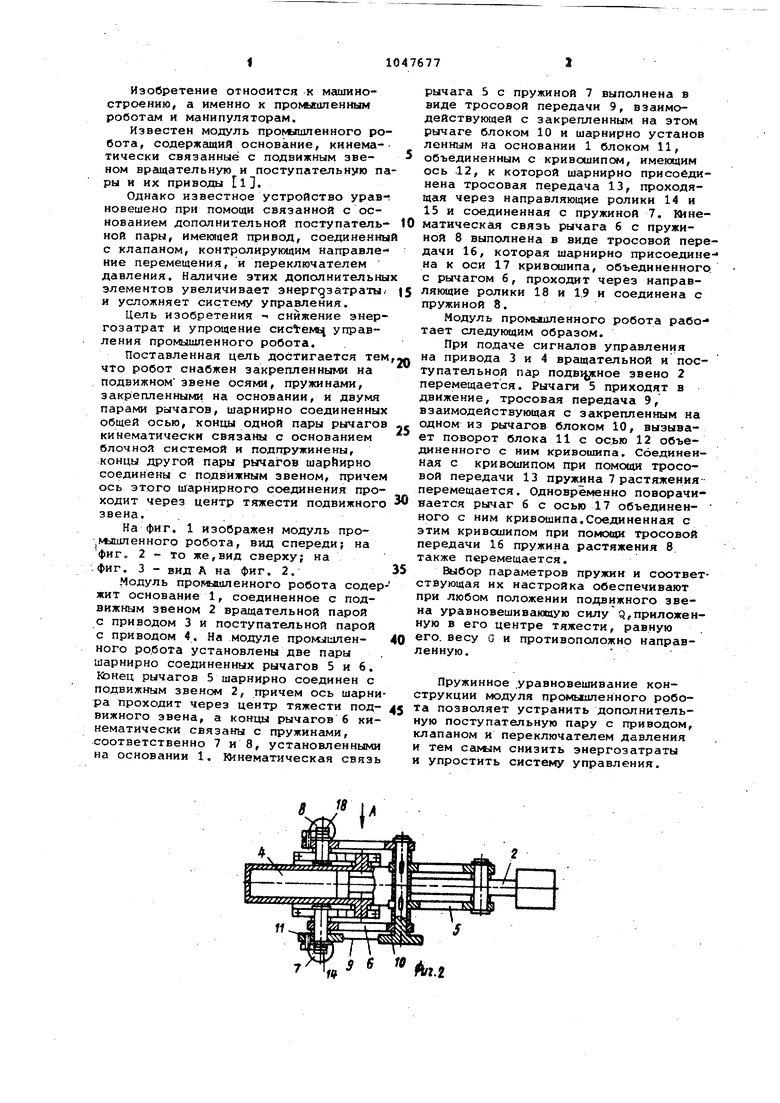
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1979 |
|
SU854707A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПАРАЛЛЕЛОГРАММНЫЙ ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 2021 |
|
RU2769002C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| Копирующий манипулятор | 1979 |
|
SU854708A1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2765030C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА, «содержащий основание, кинематически .связанные с подвижным.эвеном вращательную и поступательную пары и их приводы, отличающийся тем, что, с целью снижения энергоз.атрат и упрощения системд управления проьышленного робота, он снабжен закрепленными на подвижном звене осями, пружингши, закрепленными на основании, и Двумя парами рычагов, шарнирно соединенных общей осью, концы одной пары рычагов.кинематически связаны с основанием блочной системой и подпружинены, концы другой пары рычагов шарнирно соединены с подвижным звеном, причемось этого шарнирного соединения проходит через центр тяжести подвижного звена. g (Л N( s| о 1 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании 1304228, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
