(54) УСТРСЙСТВО ДЛЯ ДИСТАНЦИСЖНОГО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| Устройство для дистанционного управления механизированной крепью | 1975 |
|
SU697739A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Лесозаготовительная машина | 1990 |
|
SU1824098A1 |
| ГИДРОСИСТЕМА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2001 |
|
RU2210202C2 |
| Гидропривод перемещения исполнительного органа горного комбайна | 1978 |
|
SU945424A1 |
| ГИДРОСИСТЕМА МОБИЛЬНОЙ МАШИНЫ | 2004 |
|
RU2276237C2 |
| Гидросистема механизированной крепи | 1986 |
|
SU1435796A1 |
| Устройство управления многопозиционным гидравлическим распределителем | 1973 |
|
SU608945A1 |
Изофегение огносигся к горному оборудованию и можег быть использовано в механизированных крепях. Известно устройство гфот-раммиого дистанционного управления механизированной крепью, выполненные в виде дисков, со съемными кулачками, сблокированных с гидроклапанами управления приводов гид рораспределигелей, управляющих рабочими операциями крепи l. Недостатком такого устройства является сложность и возможность ошибок при подаче импульсного давления по двум магистралям управления, в частности может быть не обеспечено соответствие между характером и величиной командного воздействия (количество импульсов давления, поданных по магистрали управления) и адекватными параметрами исполнительного воздействия (поворот на определенный угол гидроконтролера). Кроме того, такое устройство не может принять большогочисла различных команд: принимается только команда на одновременную разгрузку и передвижку четной или нечетной секции, а прекращение воздействия на ручные распределители считается как команда на распор секции. Наиболее близким к предлагаемому является устройство для дистанцисмтого управления секцией механизированной крепи, включающее Связанную с гидросистемой крепи гндромагистраль управления, командный и исполнительный механизмы, размещенные, соответственно, на управляющей и управляемой секциях 2 Однако такое устройство непосредственно связано с напорной гйДролинней крепи, что при падении давления в ней может вызвать нарушение в работе устройства (неправильный прием команд). Золотник исполнительного распределителя може вра1цаться только в одну стораау (наличие храпового механизма), поэтому для его поворота в соседнее положение, которое находится не на пути движения золотника, последний необходимо повернуть почти на полный оборог,для
чего рукоятку команда его распределителя надо повернуть взад-вперед 11 раз (при б-позиционном распределителе).
Для подачи одной команды нспопнительному механизму требуется рукоятку командного распределителя несколько раз устанавливать в два конкретных положения (in и 2п) с тем, чтобы повернуть золотник исполнительного распределителя на требуемьй угол, а затем установить в третье положение (Зп) для подачи жидкости через исполнительный распределитель в ги)оцилиндры крепи. При этом . теряется одно из требуемых качеств уп равления - быстродействие.
Цель изобретения - повышение эффек- тивности управления.
Для достижения поставленной цели исполнительный механизм выполнен в виде гидродвигателя, содержащего шток силового гн/фоцилиндра, соединенный с подпружиненной тягой посредством втулочнороликовой цепи, огибающей звездочку, на которой закреплен выходной вал, а командный механизм выполнен в виде регулируемого напорного клапана, при этом входяое отверстие командного и исполнительного механизмов соединены между собой линией управления непосредственно, а с гидросистемой крепи - через дроссель.
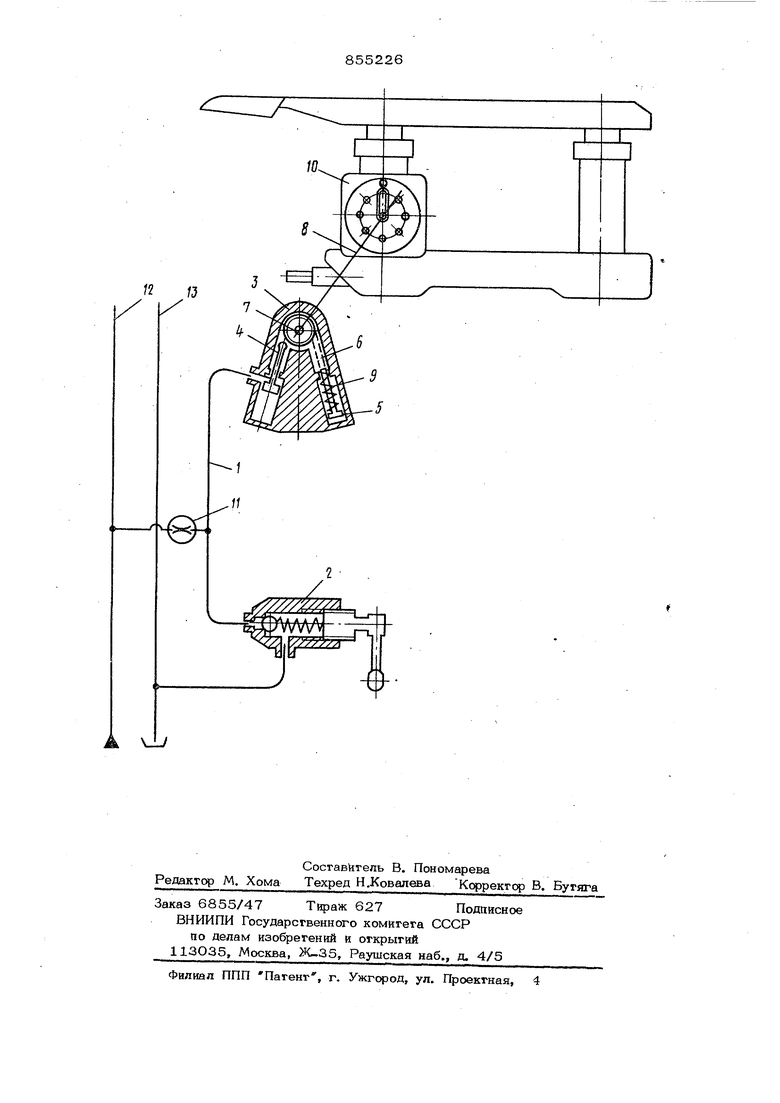
На чертеже схематически изображено устройство для дистанционного управления секцией механизированной крепи.
Устройство содержит линию управления li командный механизм 2 и исполнительный механизм 3.
Командный механизм 2 выполнен в виде регулируемого предохранительного клапана, например, прямого действия с ручной настройкой, у которого регулирующий винт выполнен заодно с рукояткой. Исполнительный механизм выполнен в виде поворотного гидродвигателя типа, у которого в расточках корпуса размещены два псршня 4 и 5, соединенные между собой втулочно-ропиковой цепью 6, огибающей звездочку 7, связанную с валом 8. Поршень 4 уплотден относительно стенок своей расточки, между поршнем 5 и стенками его расточки имеются зазоры.
Поршень 5 контактируем с регулируемой пружиной 9. Звездочка 7 жестко связана с выходным валом 8 гидродвигателя с золотником распределителя управляемой секции10. noBqpoTHbdi гидродвигатель 3 всегда расположен на управляемой секции Ю. Регулируемый предохранительный клапан 2 располагается, как правило, на управляющей секции или рядом с управляемой (например, на борту конвейера), откуда удобно наблюдать за управляемой секцией.
Входные отверстия клапана 2 и. гидродвигатели 3 соединены гидравлически линией управления 1 и через эту линию и дроссель 11 - с напорной гидролинией 12 крепи. Выходное отверстие клапана соединено со сливной гидролинией 13 крепи
(не показано).
Выходным валом 8 гидродвигателя можно управлять и вручную, что может быть использовано при наличии неисправности в описываемом устройстве.
5 Выполнение командного механизма в виде напевного клапана позволяет с Помо-: щью напорного клапана достаточно просто, удобно и быстро менять величину давления в линии управления. Изменение вели0 чины давления осуществляется известным способом - изменением величины усилия пружины при помощи поворота рукояткой регулирующего винта на определенный фиксируемый угол, например 45,9О,
5 135°,...,315. Каждый такой поворот это подача определенной команды исполнительному механизму.
Устройство в целом, состоящее из на- Q порного клапана, гидродвигателя и соединяющей их линии управления, представляет собой подсистему, в которой давление может быстро меняться от нуля до максимума и обратно (команды следует одна за /фугой).
Для уменьшения взаимного влияния другна друга устройства и крепи (падение давления в линии управления устройством может вызвать падение давления в напорной линии крепи), линия управления соедитнена с напорной гидролинией крепи посредством дросселя.
При этом величину наибольшего давления .в линии управления выбирают меньшей, чем величина рабочего давления в напорной линии крепи. Это дает возможность конструктивного выполнения гидродвигателя и напорного клапана в меньших габаритах. При ступенчатом изменении величины давления в линии управления от нуля до максимума вал гидродвигателя поворачивается на определенный угол, соответствующий величине давления в линии управления и, в конечном счете, углу поворота рукоятки командного аппарата. Как показывают испытания экспериментального образца, при подаче в гидродвигатель определенной величины давления вал гидродвигателя и связанный жестко с нам ЗОЛОТНИК распределителя секции поворачиваются на определенный угол за 0,5-1 с (время от подаш команды до начала движения цилиндра срответственно больше и составляет 1-3 с, емя возврата вала гидродв ига теля в начаЛЕЛое положение и прекращение действия команды - 0,5 с. При порыве линии у1фавления и уменьшении в ней давления до нуля вал гидродвигателя возвращается в первоначальное положение под действием пружины и вы-«полнение cef цией любой команды прекра- щаетс, Предлагаемое устройство для дистанцисиного управления секцией механизированной крепи позволяет получить по сравнению с известными устройствами для той же цели более простую конструкцию, пригодную для работы с различными типами крепей, которую можно быстро устанавливать на серийных крепях с ручным управлением, в том числе и на крепях, находящихся в эксплуатации. Кроме того, это устройство можно применять и в друГИх случаях, когда требуется дистанционное управление распреоелителями, кранами, задвижками и т.п. аппаратурой поворотного типа. Формула изобретения Устройство для дистанционного управления секцией механизированной крепи, включающее связанную с гидросистемой крепи гидромагистраль управления, командный и исполнительный механизмы, размещенные, соответственно, на управляющей и управляемой секциях, отличающееся тем, что, с целью повьпиения эффективности управления, исполнительный механизм выполнен в виде гидродвигате ля, содержащего шток силового гидрсадилиндра, соединенный с подгфужиненной тягой посредством втулочно-роликовой цепи, огибающей звездочку, на котсфой закреплен выходной вал, а командный механизм выполнен в виде регулируемого напорного клапана, при этом входные отверстия командного и исполнительного механизмов соединены между собой лтией управления непосредственно, и с гидросистемой крепи - через дррссель. Источники инфор гации, принятые во внимание при экспертизе 1.Авторское свидетепьство. № 184777, кл. Е 211) 23/11, 1965. 2.Авторское свидетельство СССР № 348846, кл. Е 21 23/12, 1970
Jf
