Изобретение относится к лесозаготовительной технике и может быть использовано в лесной промышленности.
Цель изобретения - комплексная автоматизация всех операций, выполняемых машиной.
Поставленная цель достигается тем, что лесозаготовительная машина снабжена регулируемым по высоте щупальцем деревьев, вращаемым в горизонтальной плоскости за счет внутренней трубы, нижний конец которой прикреплен к раме, а на верхний одет подшипник и колебательным в вертикальной плоскости за счет пружины и шарнира, причем в шестерни щупальца и в нижней части поворотной колонны имеются отверстия, а в верхней части и в раме крепятся фиксаторы, имеющие на концах форму скоса, расположенные в одном направлении. Гидропривод содержит напорные клапана подключенные в гидролинию между распределителями и цилиндров захвата, выдвижения и поворота манипулятора, пильного механизма, гидромоторов вращения щупальца и манипулятора в горизонтальной
плоскости. Гидропривод содержит командо- отсек, принимающий сигналы от напорных клапанов и передающий их за счет формы кулачков, сидящих на общем валу, гидрораспределителям управления исполнительных гидромашин, причем гидрораспределители управления ходовой частью имеют двойное управление. Гидропривод содержит два насоса один из которых питает гидромоторы ходовой части, поворота манипулятора, пильного механизма и гидроцилиндра поворота стойки ЗСУ, а второй питает гидроцилиндры захватов, выдвижения и поворота манипулятора, пильного механизма и гидромотор вращения щупальца.
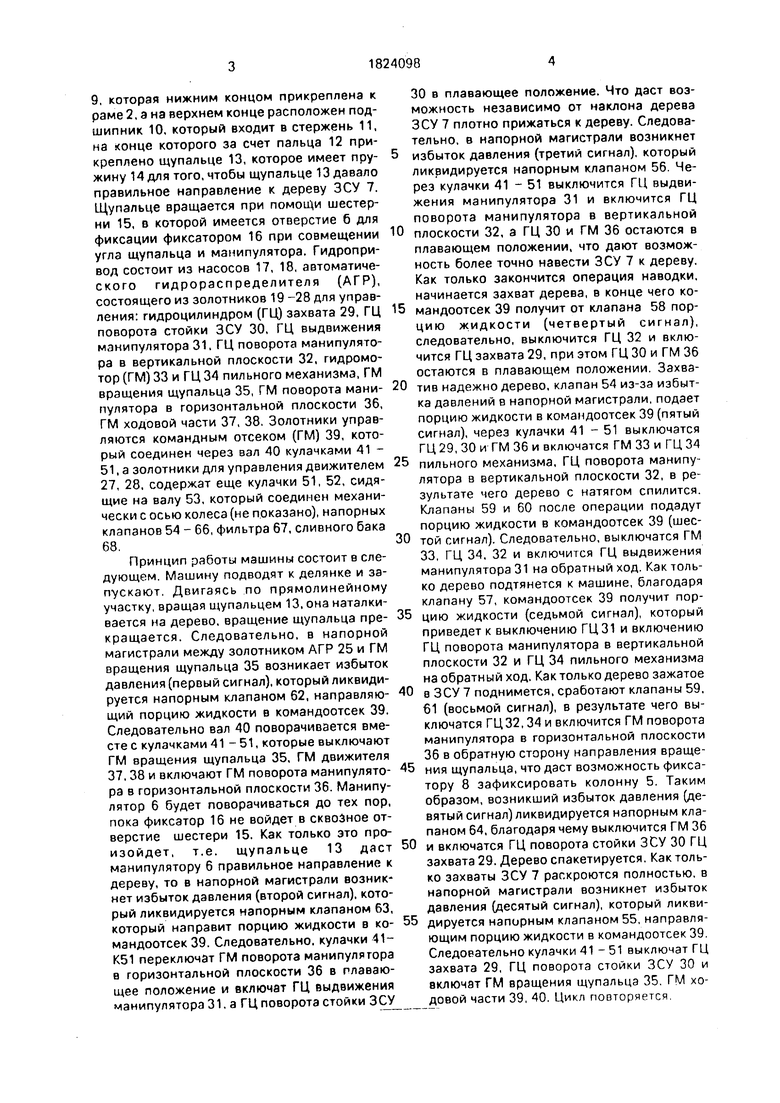
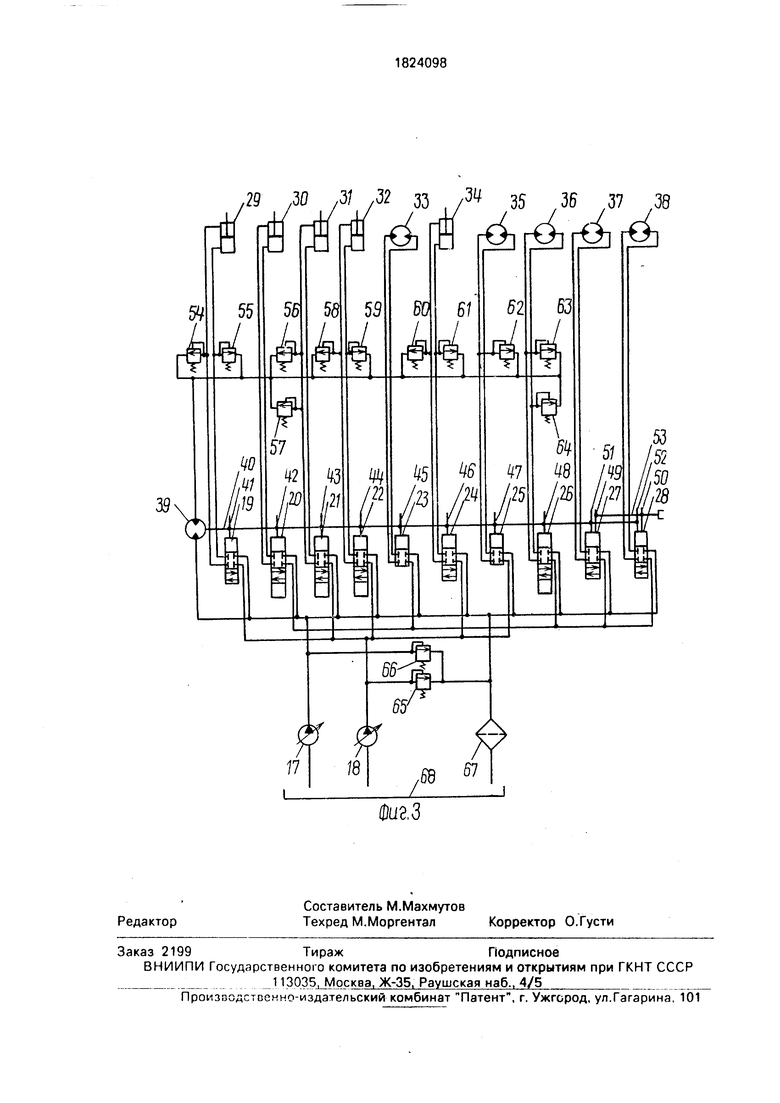
На фиг.1 изображена лесозаготовитель- ная машина; на фиг.2 - то же, вид сверху; на фиг.З - гидропривод.
Машина состоит из ходовой части 1, рамы 2. на которой установлена труба 3, вращающаяся за счет шестерни 4 с колонной 5 манипулятором 6 и ЗСУ 7. В нижней части колонны имеется сквозное отверстие а для фиксации фиксатором 8 при укладке дерева в пачку. Внутри трубы 3 расположена труба
Ј
00
ю N о о
00
9, которая нижним концом прикреплена к раме 2, а на верхнем конце расположен подшипник 10, который входит в стержень 11, на конце которого за счет пальца 12 прикреплено щупальце 13, которое имеет пружину 14 для того, чтобы щупальце 13 давало правильное направление к дереву ЗСУ 7. Щупальце вращается при помощи шестерни 15, в которой имеется отверстие б для фиксации фиксатором 16 при совмещении угла щупальца и манипулятора. Гидропривод состоит из насосов 17, 18, автоматического гидрораспределителя (АГР), состоящего из золотников 19 -28 для управления: гидроцилиндром (ГЦ) захвата 29, ГЦ поворота стойки ЗСУ 30, ГЦ выдвижения манипулятора 31, ГЦ поворота манипулятора в вертикальной плоскости 32, гидромотор (ГМ) 33 и ГЦ 34 пильного механизма, ГМ вращения щупальца 35, ГМ поворота манипулятора в горизонтальной плоскости 36, ГМ ходовой части 37, 38. Золотники управляются командным отсеком (ГМ) 39, который соединен через вал 40 кулачками 41 - 51, а золотники для управления движителем 27, 28. содержат еще кулачки 51, 52, сидящие на валу 53, который соединен механически с осью колеса (не показано), напорных клапанов 54 - 66, фильтра 67, сливного бака 68.
Принцип работы машины состоит в следующем. Машину подводят к делянке и запускают. Двигаясь по прямолинейному участку, вращая щупальцем 13, она наталкивается на дерево, вращение щупальца прекращается. Следовательно, в напорной магистрали между золотником АГР 25 и ГМ вращения щупальца 35 возникает избыток давления (первый сигнал), который ликвидируется напорным клапаном 62, направляющий порцию жидкости в командоотсек 39. Следовательно вал 40 поворачивается вместе с кулачками 41 - 51, которые выключают ГМ вращения щупальца 35, ГМ движителя 37, 38 и включают ГМ поворота манипулятора в горизонтальной плоскости 36. Манипулятор 6 будет поворачиваться до тех пор, пока фиксатор 16 не войдет в сквозное отверстие шестери 15. Как только это произойдет, т.е. щупальце 13 даст манипулятору 6 правильное направление к дереву, то в напорной магистрали возникнет избыток давления (второй сигнал), который ликвидируется напорным клапаном 63, который направит порцию жидкости в командоотсек 39. Следовательно, кулачки 41- К51 переключат ГМ поворота манипулятора в горизонтальной плоскости 36 в плавающее положение и включат ГЦ выдвижения манипулятора 31, а ГЦ поворота стойки ЗСУ
30 в плавающее положение. Что даст возможность независимо от наклона дерева ЗСУ 7 плотно прижаться к дереву. Следовательно, в напорной магистрали возникнет
избыток давления (третий сигнал), который ликвидируется напорным клапаном 56. Через кулачки 41 - 51 выключится ГЦ выдвижения манипулятора 31 и включится ГЦ поворота манипулятора в вертикальной
0 плоскости 32, а ГЦ 30 и ГМ 36 остаются в плавающем положении, что дают возможность более точно навести ЗСУ 7 к дереву. Как только закончится операция наводки, начинается захват дерева, в конце чего ко5 мандоотсек 39 получит от клапана 58 порцию жидкости (четвертый сигнал), следовательно, выключится ГЦ 32 и включится ГЦ захвата 29, при этом ГЦ 30 и ГМ 36 остаются в плавающем положении. Захвэ0 тив надежно дерево, клапан 54 из-за избытка давлений в напорной магистрали, подает порцию жидкости в командоотсек 39 (пятый сигнал), через кулачки 41 - 51 выключатся ГЦ 29, 30 и ГМ 36 и включатся ГМ 33 и ГЦ 34
5 пильного механизма, ГЦ поворота манипулятора в вертикальной плоскости 32, в результате чего дерево с натягом спилится. Клапаны 59 и 60 после операции подадут порцию жидкости в командоотсек 39 (шес0 той сигнал). Следовательно, выключатся ГМ 33, ГЦ 34, 32 и включится ГЦ выдвижения манипулятора 31 на обратный ход. Как только дерево подтянется к машине, благодаря клапану 57, командоотсек 39 получит пор5 цию жидкости (седьмой сигнал), который приведет к выключению ГЦ 31 и включению ГЦ поворота манипулятора в вертикальной плоскости 32 и ГЦ 34 пильного механизма на обратный ход. Как только дерево зажатое
0 в ЗСУ 7 поднимется, сработают клапаны 59, 61 (восьмой сигнал), в результате чего выключатся ГЦ32,34 и включится ГМ поворота манипулятора в горизонтальной плоскости 36 в обратную сторону направления враще5 ния щупальца, что даст возможность фиксатору 8 зафиксировать колонну 5. Таким образом, возникший избыток давления (девятый сигнал) ликвидируется напорным клапаном 64, благодаря чему выключится ГМ 36
0 и включатся ГЦ поворота стойки ЗСУ 30 ГЦ захвата 29. Дерево спакетируется. Как только захваты ЗСУ 7 раскроются полностью, в напорной магистрали возникнет избыток давления (десятый сигнал), который ликви5 дируется напорным клапаном 55, направляющим порцию жидкости в командоотсек 39. Следовательно кулачки 41-51 выключат ГЦ захвата 29, ГЦ поворота стойки ЗСУ 30 и включат ГМ вращения щупальца 35. ГМ ходовой части 39, 40. Цикл повторяется,
Для того, чтобы машина работала в деянке по заданному режиму, т.е. заходила в глубь лесосеки на заданное расстояние, поворачиваясь на 90°, проходила расстояние равное длине щупальца и снова, пово- 5 рачиваясь на 90 гр., выходила к лесовозной дороге и т.д., предусмотрены кулачки 51, 52, т.е. золотники 27, 28, управляющие ГМ ходовой части 37, 38 берут сигналы и от оси движителя.10
Расположение в одном направлении форм скоса фиксаторов 8, 16, позволяют при наводке ЗСУ 7 на дерево, вращая манипулятор, в направление вращения щупальца, зафиксировать направление только 15 фиксатором 16. При пакетировании дерева, вращая манипулятор в противоположное направление вращения щупальцу, позволяют зафиксировать направление только фиксатором 8.20
С целью получения избытков давлений в напорных магистралях (сигналов), гидронасос 17 питает испытательные гидромашины 37, 38, 30, 36, 33, а гидронасос 18 - гидромашины 35, 31, 32, 29, 34.25
Машина может работать успешно в той лесосеке, в которой нужно провести сплошные рубки и нет таких уязвимых мест (яма, канава, обрыв), которые машина не смогла бы самостоятельно преодолеть. При надоб- 30 ности настройщик может изменять высоту щупальца.
Применение такой машины в лесной промышленности освободит от механизированного, утомительного труда, операто- 35 ров, улучшит условия работы, повысится производительность труда за счет увеличения коэффициента использования рабочего времени.
Формулаизобретения40
1. Лесозаготовительная машина, содержащая раму, ходовую часть, закрепленный на поворотной колонне, манипулятор с захват- но-срезающим устройством и гидросистему. со связанными между собой посредством 45 гидролиний гидрораспределителями, гидродвигателями, гидронасосом, фильтром и сливным баком, отличающаяся тем, что, с целью повышения эффективности работы и улучшения условий труда, она снабжена уст- 50 юйством обнаружения деревьев, выполненным в виде подпружиненной в вергик.чмь ной плоскости штанги, закрепленной unp- мирно на верхнем конце стержня, жестко связанного с установленной в подшипниках вертикальной трубой, при этом на стержне закреплена шестерня с отверстием, а на верхнем торце поворотной колонны с возможностью взаимодействия с упомянутым отверстием установлен фиксатор, причем на нижнем торце поворотной колонны выполнено отверстие, а на раме с возможностью взаимодействия с упомянутым отверстием в положении поворотной колонны с манипулятором, соответствующем пакетированию срезанного дерева, установлен второй фиксатор, кроме того, скосы фиксирующих стержней обоих фиксаторов расположены в одном направлении.
2.Машина по п.1,отличающаяся тем, что гидросистема снабжена напорными клапанами, которые включены в гидролинии между гидродвигателями захвата, выдвижения и поворота манипулятора, привода и перемещения пильного механизма, поворота устройства обнаружения и поворотной колонны с манипулятором и соответствующими гидрораспределителями.
3.Машина по п.1, о т л и ч а ю щ а я с я тем, что гидросистема снабжена командоот- секом, выполненным в виде гидромотора, на оси которого закреплены кулачки с возможностью взаимодействия с золотниками гидрораспределителей гидросистемы, при этом гидрораспределители управления гидродвигателями ходовой части машины снабжены системой ручного перемещения их золотников.
4.Машина по п.1,отличающаяся тем, что гидросистема снабжена вторым гидронасосом, прр этом гидродвигатели ходовой части, поворота захватно-среэающе- го устройства, поворота манипулятора в вертикальной плоскости и привода пильного механизма соединены с первым гидронасосом, а гидродвигатели захвата, выдвижения манипулятора, перемещения пильного механизма, поворота устройства обнаружения деревьев и поворота манипу-, лятора в горизонтальной плоскости - с вторым гидронасосом.
/3
-12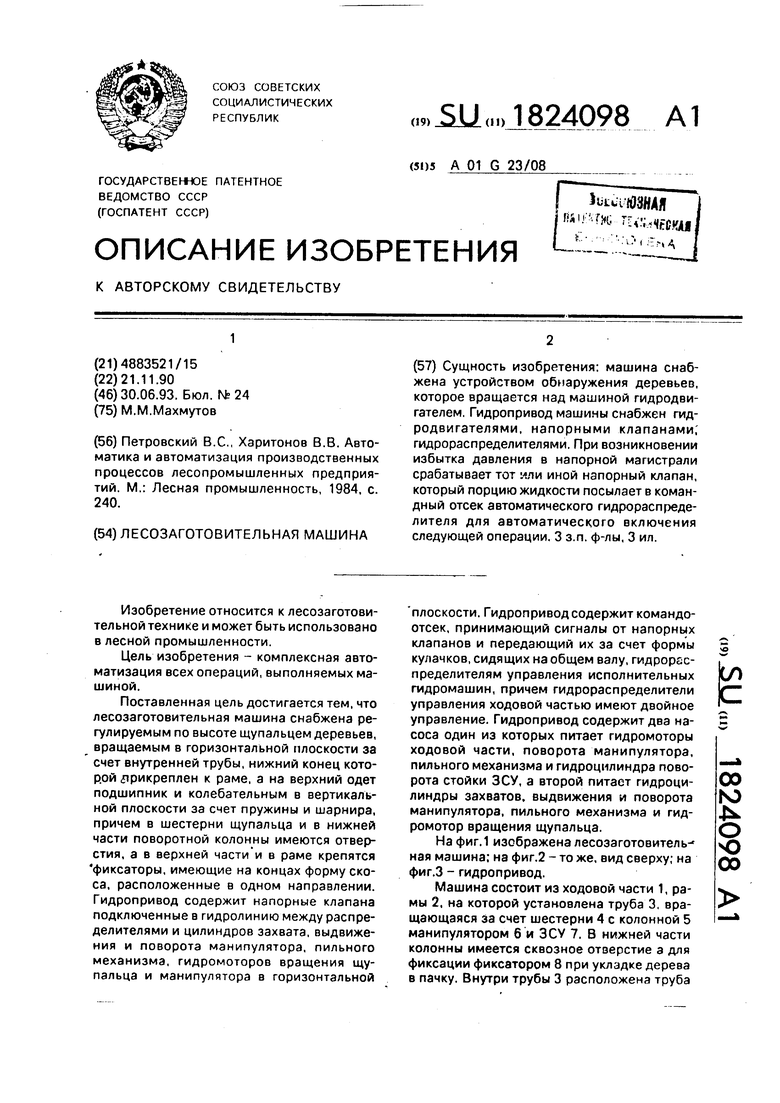
| название | год | авторы | номер документа |
|---|---|---|---|
| Камнерезная машина | 1989 |
|
SU1703820A1 |
| Гидропривод рабочих органов лесозаготовительной машины (его варианты) | 1984 |
|
SU1259527A1 |
| Привод рабочих органов лесозаготовительной машины | 1985 |
|
SU1314162A2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЗАХВАТНО-СРЕЗАЮЩИМ УСТРОЙСТВОМ ВАЛОЧНО-ПАКЕТИРУЮЩЕЙ МАШИНЫ | 2013 |
|
RU2529156C2 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| Лесозаготовительная машина | 1988 |
|
SU1782465A1 |
| Загрузочное устройство мусоровоза | 1985 |
|
SU1323471A1 |
| Устройство управления лесозаготовительной машиной | 1990 |
|
SU1757532A1 |
| Гидропривод лесозаготовительной машины | 1979 |
|
SU1079001A1 |
Сущность изобретения: машина снабжена устройством обнаружения деревьев, которое вращается над машиной гидродвигателем. Гидропривод машины снабжен гидродвигателями, напорными клапанами; гидрораспределителями. При возникновении избытка давления в напорной магистрали срабатывает тот или иной напорный клапан, который порцию жидкости посылает в командный отсек автоматического гидрораспределителя для автоматического включения следующей операции. 3 з.п. ф-лы, 3 ил.
12 6
Фиг2
2 5
,29 JO /3/ /32 33 t/3V 35 35 37 38
ra
| Петровский B.C., Харитонов В.В | |||
| Автоматика и автоматизация производственных процессов лесопромышленных предприятий | |||
| М.: Лесная промышленность, 1984, с | |||
| Русская печь | 1919 |
|
SU240A1 |
