J1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления технически- мй объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых возмущений с нестационарными свойствами.
Зависимость между выходным сигналом у объекта и управлярощими воздей
СТВИЯМИ U
имеет вид
и и„ в операторной форме
У(р)
где
LlE)
М(р) X и,(р) 7 . и Т:,
PL.
-PU
и kPJ+-7 -r е - X
(1)
времена запаздывания,
а
причем г х, г ; L(p) ,
м(р);
N(p) и Р(р) - полиномы от р, степени полиномов L(p) и КЧр) не превышают степени полиномов М(р) и Р(р). Характеристики возмущений существенно изменяются на интервале врвмен Тг- . Задача управления заключается в обеспечении инвариантности выходного сигнала у от неконтролируемых возмущений при ограниченных изменениях второго управляющего воздействия.
Объектами могут служить сталеплавильные агрегаты для; выплавки и рафинирования стали, В частности, в кислородном конверте-р е npi регулировани температуры металла выходным сигнало является температура выплавляемого металла; первым управляющим воздействием - масса лома в завалку, который подготавливается заранее на время i вторьм управляющим воздействием - охлаждающие добавки в ограниченном диапазоне, которые даются в конвертер с очень малым временем запаздывания rg Цель изобретения расширение функциональных возможностей и повышение точности регулирования.
На чертелсе представлена блок-схема системы управления.
Система управления содержит объект 1 управления, первьш 2 и второй 3 исполнительные блоки, датчик 4, второй блок 5 задержки, третий блок 6 сравнения, модель 7 объекта управления без запаздывания, cy мaтop 8, второй экстраполятор 9, функциональный преобразователь 10, первьш блок 11 сравнения, первый блок 12 задержки, первый экстраполятор 13,, регулятор 14,
0
0
30
5
фильтр 15 низкой частоты, второй блок 16 сравнения, задатчик 17.
На чертеже приняты обозначения: y(t) - выходной сигнал объекта управ- ления в t-й момент времени; и (t), U (t) - первое и второе управляющие воздействия; uJ- неконтролируемое возмущение.
Регулятор 14 имеет пропорционально-интегральный закон функционирования. Фильтр 15 низкой частоты реализован в виде последовательно соединенных блока сравнения, ограничителя сигнала и интегратора, выход которого подключен к входу блока сравнения. В качестве датчика 4 может быть использована погружная термопара первого 2 и второго 3 исполнительных блоков - системы порционного дозирования, модель. 7 объекта управления без запаздывания, например, - в виде последовательно соединенных инерционных звеньев второго порядка.
Система управления работает следующим образом.
Сигнал о заданном значении у выхода у объекта 1 управления с задат- чнка 17 идет на второй блок 16 сравнения, где из него в JIчитaeтcя сигнал
5
него
о выходе модели у , поступающий с выхода сумматора -а
35
40
8. Сигнал ошибки регулирования fa (t)y-(t)-y(t) подается на фильтр 15 низкой частоты, в котором подавляются измерительные помехи, и .далее на регулятор 14, вырабатываю- шдш регулирующее воздействие
utU),(t))dt, (2) где k и k - коэффициент усиления и время изодрома регулятора, выбираемые известными методами.
Сигнал об uj (t) экстраполируется на время запаздывания Т в первом экстраполяторе 13 и через первый ис
полнительный блок 2 подается на первый вход объекта 1 управления. Кроме того, экстраполируемый сигнал задер- Лчивается на время t., в первом блоке 12 задержки и вычитается в первом блоке 11 сравнения из выходного сигнала регулятора 14, Полученный сигнал об ошибке экстраполяции первого управляющего воздействия (t) поступает в функциональный преобразователь 10, где пересчитывается во второе управляющее воздействие по выражению
. н-ШШ :
где- L(p), М(р) ,
N(p), Р(р) - полиномы из уравнения (1), Сигнал U (t) экстраполируется во втором экстраполяторе 9 на время } и через второй исполнительный блок 3 подается на второй вход объекта 1 управления. Кроме того, этот сигнал задерживается на малое время запаздывания 2 во втором блоке 5 задержки и вычитается в третьем блоке 6 сравнения из сигнала о втором управляющем воздействии, идущего с выхода функци- онального преобразователя 10. Полученный сигнал об ошибке экстраполяции второго управляющего воздействия J (t поступает в модель 7 объекта управления без запаздывания, где пересчиты- вается в сигнал о модельном изменении выхода объекта управления S у (t) , который подается на второй вход сумматора 8, где суммируется с сигналом об измеренном датчиком 5 значении вы- хода объекта 1 управления. Таким образом, на выходе сумматора 8 получается сигнал y (t) , определяемый по выражению
y(t)y4t)+Sy;(t),
де )
и / ч
у (t)
сигнал о модельном изменении выходного сигнала объекта управления в зависимости от ошибки экст- раполяции J (t); сигнал об измеренном датчиком значении выхода
объекта управления. Предлагаемая система управления имеет более широкие функциональные возможности, так как вырабатываются сигналы об управляющих воздействиях для двух каналов, причем сигнал второго управляющего воздействия имеет небольшой диапазон изменения, потому что используется только для компенсации ошибок экстраполяции сигнала о
первом управляющем воздействии. Кроме вого блока сравнения подключен к вхотого, наличие второго канала регулилу функционального преобразователя.
Редактор А.Козориз
Составитель А.Лащев Техред Л.Сердюкова Корректор И.Муска
Заказ 7642/49Тираж 862 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 .
50 5 ) 20
2854304
рования с очень малым временем запаздывания позволяет повысить точность регулирования, так как регулируемый мо30
-
35
40
45
дельный выходной сигнал ytt) меньше отличается от натурного у (t), нeжeJги модельный выход, рассчитанный с использованием модели первого канала регулирования. Последнее объясняется тем, что ошибки экстраполяции сигнала на существенно более короткие отрезки времени значительно меньше, чем на длительные отрезки.
Формула изобретения
Система управления, содержащая модель объекта управления без запаздывания, первый блок задержки, первый блок сравнения, последовательно включенные задатчик, второй блок сравнения, фильтр низкой частоты, регулятор, первый экстраполятор, первый ис- тголнительный блок, объект управления, датчик и сумматор, выход которого соединен с вторым входом второго блока сравнения, вход первого экстраполято- ра соединен с первым входом первого блока сравнения, а выход через первый блок задержки - с вторым входом пер-. вого блока сравнения, выход модели объекта управления без запаздывания соединен с вторым входом сумматора, отличающаяся тем, что, с целью расширения функциональных возможностей и повышения точности регулирования, в нее введены последовате- соединенные второй блок задержки, третий блок сравнения, последовательно включенные функциональный преобразователь, второй экстраполятор и второй исполнительный блок, выход кол орого подключен к второму входу объекта управления, а вход второго блока задержки подключен к выходу второго экстраполятора, вход которого соединен с вторым входом третьего блока сравнения, выход которого соединен с входом модели объекта управления без запаздывания, а выход перлу функционального преобразователя.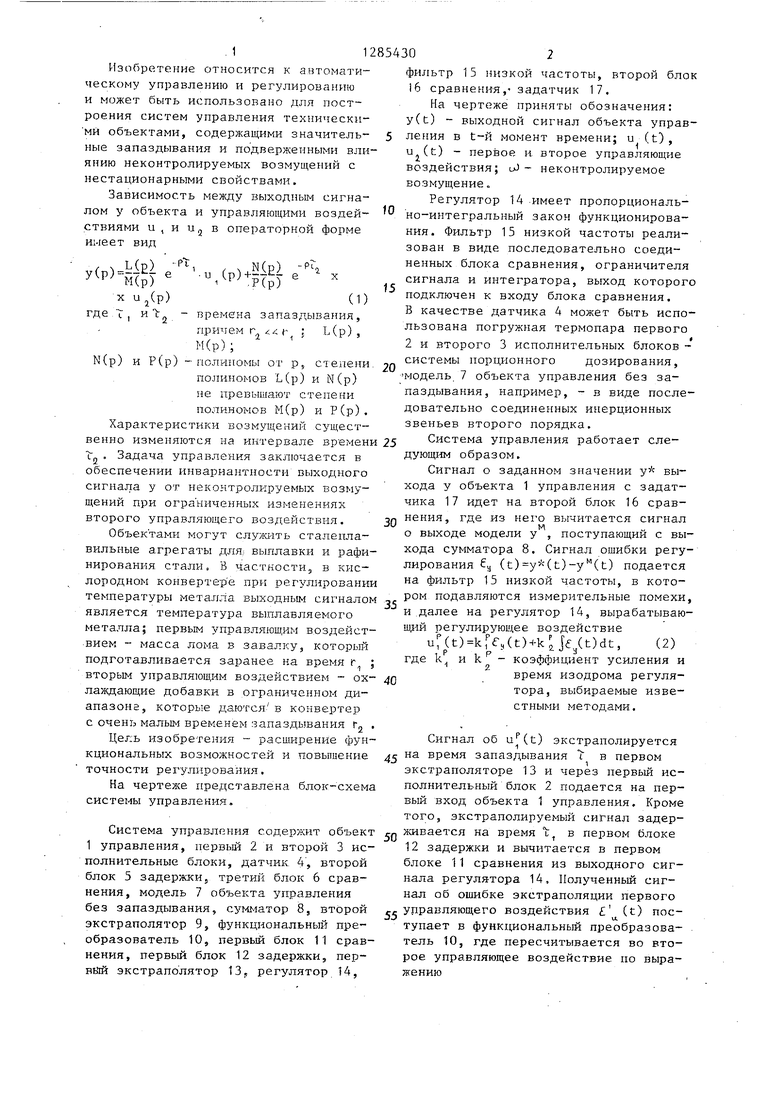

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Устройство для настройки системы управления | 1988 |
|
SU1515145A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Регулятор | 1980 |
|
SU855607A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использо вано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых возмущений. Система управления содержит модель 7 объекта управления без запаздывания, второй исполнительный блок 3, первый блок 12 задержки, первый блок 11 сравнения, последовательно включенные за- датчик 17, второй блок 16 сравнения. фильтр 15 низкой частоты, регулятор 14, первый экстраполятор 13, первый исполнительный блок 2, объект 1 управления, датчик 4, сумматор 8, последовательно включенные функциональный преобразователь 10, второй экстраполятор 9, второй блок 5 задержки, третий исполнительный блок 6. Изобретение позволяет расширить функциональные возможности системы за счет того, что сигнал об ошибке экстраполяции первого управляющего воздействия пересчитывается в сигнал изменения второго управляющего воз- . действия, который экстраполируется на малый интервал времени tj запаздывания во втором канале регулирования, а также повысить точность регулирования за счет того, что ошибки экстраполяции на меньший интервал времени 1„ значительно меньше ошибок экстраполяции на больший интервал времени нале регулирования. 1 ил. t запаздывания в первом каi (Л С ю 00 СП iti 00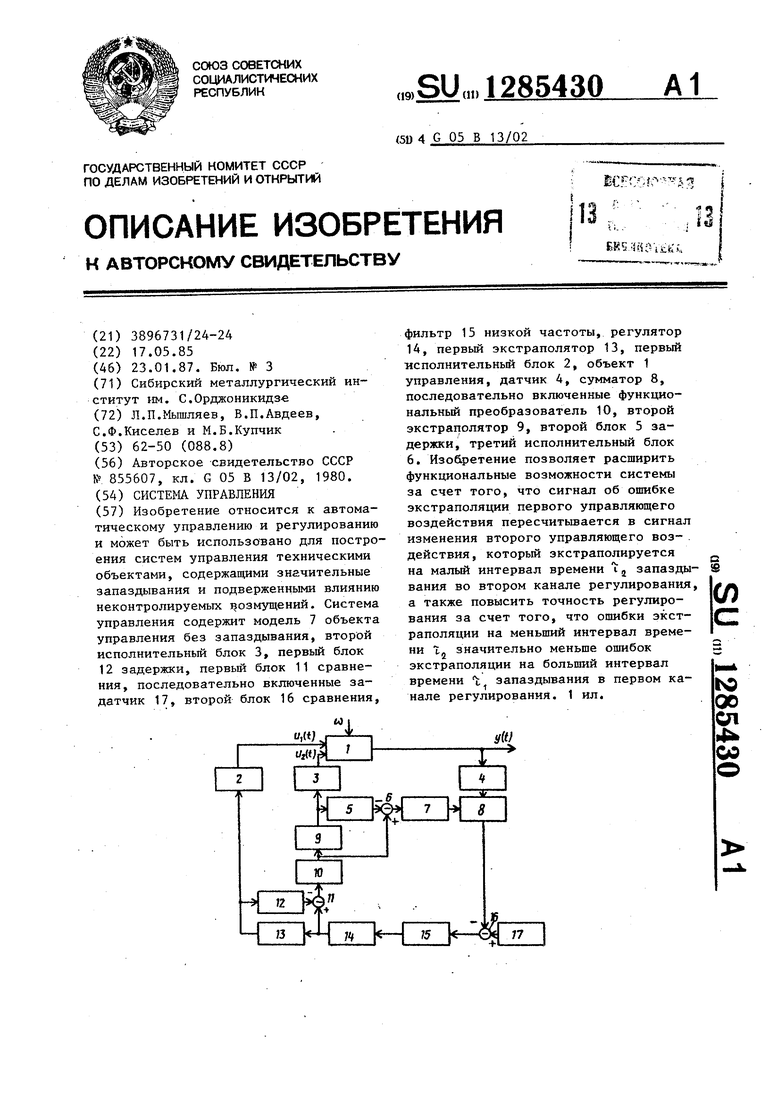
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
