вход второго сумматора соединен с выходом третьего фильтра низкой частоты, второй вход второго сумматора соединен с выходом второго элемента задержки, вход которого соединен с выходом второго фильтра низкой частоты, выход второго сумматора соединен с входом первого экстраполятора, соединенного своим выходом с первым входом третьего элемента сравнения, второй вход которого соединен с выходом второго экстраполятора, подключенного своим входом к выходу второго фильтра низкой частоты, выход третьего элемента сравнения соединен с одним из входов третьего сумматора входы экстраполяторов первого блока экстраполяторов соединены с выходом второго сумматора., входы экстраполяторов второго блока экстраполяторов соединены с выхоДом второго фильтра низкой частоты, входы элементов задержки второго блока элементов задержки соединены с выходом второго фильтра низкой частоты, первые входы элементов сравнения второго блока элементов сравнения соединены с выходами соответствующих экстраполяторов первого блока экстраполяторов,, вторые входы элементов сравнения второго блока элементов сравнения соединены с выходами соответствующих экстраполяторов второго блока экстраполяторов, с выходом второго фильтра низкой частоты и с выходами .соответствующих элементов задержки второго блока элементов задержки.
выходы элементов сравнения второго блока элементов, сравнения соединены с первыми входами соответствующих сумматоров первого блока сумматоров, вторые входы которых соединены с выходами соответствующих экстраполяторов третьего блока экстраполяторов соединенных своими входами с выходом шестого элемента сравнения, первый вход четвертого сумматора соединен с выходом второго элемента сравнения второй вход - с выходом шестого элемента сравнения, выходы элементов сравнения первого блока элементов сравнения соединены с другими входами пятого сумматора, выход которого соединен с одним из входов третьего сумматора, второй вход пятого элемента сравнения соединен с выходом пер-вого элемента задержки, второй вход шестого элемента сравнения соединен с выходом третьего фильтра низкой частоты, выход шестогЬ сумматора соединен с входом четвертого элемента сравнения, второй вход шестого сумматора соединен с выходом переключателя, первый информационный вход которого соединен с вторым входом седьмого элемента сравнения, а второй информационный вход переключателя . соединен c.BTopbiM входом четвёртого элемента сравнения, управляющий вход переключателя соединен с выходом восьмого элемента сравнения, выход третьего экстраполятора соединен с одним из входов третьего сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1980 |
|
SU907511A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Регулятор | 1980 |
|
SU855607A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
УСТРОЙСТВО ДЛЯ СОГЛАСОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТЕХНОЛОГИЧЕСКИХ УЧАСТКОВ, содержащее последовательно соединенные первый элемент сравнения, первый фильтр низкой частоты, первый пропорционально-интегральный блок, второй элемент сравнения, первую модель объекта регулирования и первый сумматор, последовательно соединенные третий фильтр низкой частоты, второй сумматор, первый экстраполятор, третий элемент сравнения, третий сумматор и первый элемент задержки, второй фильтр низкой частоты, первый блок элементов задержки, первый и второй блоки экстраполяторов, последовательно соединенные первый блок сумматоров и первый блок элементов сравнения, выход первого сумматора соединен с вторым входом первого элемента сравнения, вход третьего фильтра низкой частоты соединен с выходом первого пропорционально-интегрального блока, выход первого элемента задержки соединен с вторым входом второго элемента сравнения, входы элементов задержки первого блока элементов задержки соединены с выходом третьего сумматора, второй вход одного элемента сравнения первого блока элементов сравнения соединен с выходом третьего сумматора, а вторые входы остальных элементов сравнения первого блока элементов сравнения соединены с выходами соответствующих элементов задержки первого блока элементов задержки, отличающееся тем, что, с целью повышения надежности и расширения функдиональных возможностей устройства, (Л оно содержит переключатель, второй элемент задержки, второй экстраполятор, второй блок элементов задержки, второй блок элементов сравнения, третий блок экстраполяторов, последовательно соединенные четвертый сумматор, инерционное звено первого порядка, интегратор и пятый сумматор, последовательно соединенные четвертый элемент сравнения, четвертый фильтр низкой частоты, второй пропорциональноо: интегральный блок, пятый элемент сравнения, вторую модель объекта регули рования и шестой сумматор, последовательно соединенные пятый фильтр низ;кой частоты, шестой элемент сравнения и третий экстраполятор, последовательно соединенные первый источник постоянного сигнала, седьмой элемент сравнения, блок определения модуля, реле, блок определения длительности отказа и восьмой элемент сравнения, подключенный вторым входом к выходу второго источника постоянного сигнала, первый
Изобретение относится к автоматическому управлению и регулированию и может быть использовано в черной металлургии, напримерj где имеются технологические комплексы, содержащие последовательно включенные участки, разделенные промежуточными емкостями ограниченного объема.
Управление должно обеспечивать заданное количество материала в промежуточной емкости.
Предполагается, что динамика объекта достаточно хорошо аппрьксимируется операторами
KI
iThnW-4pHi ;.
п(. .( . ,а)
где К и Kj - коэффициенты усиления; и , - время запаздывания
/в канале регулирования и в канале контролируемого возмущения соответственно;J Т - постоянная времени инерции, которая незна чительно меняется в те ние длительности переходного процесса; H(t) - регулируемый выход; регулирующее воздействие;q (i)(i1 - контролируемые возмущения;Qn(t)- производительность участка, подающего материал в промежуточную емкость. Примером такого рода объектов управления является тракт подачи аглом рационной шихты из шихтового отделения в спекательное отделение аглофаб рики, где регулируемая выходная пере менная представляет собой уровень H(t) (или количество) шихты в промежуточном бункере спекательного отделения. Регулирующим воздействием является расход шихты (без возврата) qi(t). В число контролируемьгх возму щений входят: расход возврата qg(t), добавляемого в шихту и расход шихты qp(t) из промежуточного бункер спекательного отделения. Непосредственно перед загрузкой- шихты в промежуточный бункер контролируется общая производительность qfj(t), соответствующая расходу шихты, смешанной с возвратом. Известно устройстве для автоматического согласования производительности технологических участков, содержащее блоки контроля уровня (коли чества) материала в промежуточной емкости, блоки кЬнТрОЛЯ производител ности участков, подающего материал в промежуточную емкость и потребляющего .материал, блоки сравнения, блоки управления производительности подающего участка . Наиболее близким к предлагаемому является регулятор, содержащий последовательно соединенные первый элемент сравнения, первый фильтр низкой частоты, пррпорционально-ннтегральный блок, второй элемент срав нения, модель объекта регулирования первый сумматор, соединенный своим выходом с вторым входом первого элемента сравнения, последовательно соединенные второй фильтр низкой частоты, масштабирзпощий блок, третий элемент сравнения, первый экстрапо07 , 4 07 , лятор, второй сумматор, третий сумматор и первый элемент задержки, соединенный своим выходом с вторым входом второго элемента сравнения, третий фильтр низкой частоты, вход которого соединен с выходом пропорциональности-интегрального блока, а выход соединен с вторым входом третьего .элемента сравнения, последовательно соединенные первьй блок экстраполяторов, первьй блок сумматоров и первый блок элементов сравнения, причем входы экстраполяторов первого блока экстраполяторов соединены с выходом третьего элемента сравнения, а выходы элементов сравнения первого блока элементов сравнения соединены с входами .третьего сумматора, второй блок экстраполяторов и первый блок элементов задержрого блока экстраполяторов соединены с выходами масштабирующего блока, а их выходы соединены с вторыми входами соответствующих сумматоров первого блока сумматоров, входы элементов задержку первого блока элементрв задержки соединены с выходом третьего сумматора, второй вход одного элемента сравнения первого блока элементов сравнения соединен с выходом третьего сумматора, а вторые входы остальных элементов сравнений, первого блока элементов сравнения соединены с выходами соответствующих элементов задерки первого блока элементов задержки 2 . / :В ЭТОМ регуляторе функционирует модельный замкнутый контур регулирования, составленный из модели объек Ьс.ии«, ,.nn и; «им«.« u. регулирования без запаздывания. первого сумматора, первого элемента сравнения, первого фильтра низкой частоты, пропорционально-интегрального блока и второго элемента сравнения. В этом модельном контуре регулирования реализуется операция неявного обращения динамического оператора, модели объекта регулирования без запаздывания и оценивание идеальных значений управляющего воздействия. Оценки идеального управления приводятся расчетным путем с использованием второго фильтра низкой частоты, масштабирующего блока и третьего элемента сравнения к базовому уровню, контролируемого возмущейия, В результате на выходе третьего элемента сравнения формируS1
ется сигнал приведенного управления, изменения которого направлены на компенсацию неконтролируемых возмущений. После оценивания приведенного .управления экстраполируется его траектория (с использованием первого экстраполятора и первого блока экстраполяторов) на интервале запаздывания в объекте регулирования. На этом же интервале во втором блоке экстраполяторов экстраполируется траектория регулирующего воздействия для компенсации контролируемого возмущения, В результате сложения этих траекторий во втором сумматоре и в первом блоке сумматоров формируется траектория управления, необходимого для компенсации контролируемых и неконтролируемых возмущений. В первом блоке элементов сравнения для каящого временного сечения на.интервале запаздывания рассчитывается разность между управлениями, необходимыми для компенсации контролируемых и неконтролируемых возмущений, и фактически реализованными на этом интервале времени. Сигналы о необходимых управлениях, поступают с выходов первого бло ка сумматоров, а сигналы о фактически реализованных управлениях поступают с выхода третьего сумматора и с выходов первого блока элементов задержки. Сигналы с выходов первого блока элементов сравнения суммируются в третьем сумматоре с сигналом с выхода второго сумматора. В резуль тате на выходе третьего сумматора формируется управление, скорректированное с учетом ошибок регулирбвания на интервале запаздывания в объекте регулирования.
Недостатками этого регулятора при использовании его для согласования производительности шихтового и спектрального отделений аглофабрики являются низкая надежность, обусловленная тем, что в случае отказа датчика уровня в промежуточном бункере спекятельного отделения регулятор оказывается практически неработоспособным, а также ограниченные функциональные возможности регулятора, обусловленные тем, что его структура не позволяет использовать информацию о втором контролируемом возмущении, влияющем на величину уровня в промежуточном бункере с запаздыванием большим, чем запаздьшание во влияний первого возмущения.
Цель изобретения - повышение надежности и расширение функциональных возможностей предлагаемого устройства.
5 Поставленная цель достигается тем, что в устройство, содержащее последовательно соединенные первый элемент сравнения, первый фильтр низкой частоты, первый пропорционально-интеграль10 ный блок, второй элемент сравнения, первую модель объекта регулированияи первьй сумматор, последовательно соединенные третий фильтр низкой частоты, второй сумматор, первый экстра15 полятор, третий элемент сравнения, третий сумматор и первый элемент задержки, второй фильтр низкой частоты, первый блок элементов задержки, первый и второй блоки экстраполяторов,
20 последовательно соединенные первьй блок сумматоров и первый блок элементов сравнения, выход первого сумматора соединен с вторым входом первого элемента сравнения, вход третьего
25 фильтра низкой частоты соединен с вы ходом первого пропорционально-интегрального блока, выход первого элемента задержки соединен с вторым входом второго элемента сравнения, входы
30 элементов задержки первого блока элементов задержки соединены с выходом третьего сумматора, второй вход одного элемента сравнения первого блока элементов сравнения соединен с выходом третьего сумматора, а вторые входы остальных элементов сравнения первого блока элементов сравнения соединены с выходами соответствующих элементов задержки первого блока
д элементов задержки, введены переклю-. чатель, второй элемент задержки, второй экстраполятор, второй блок элементов задержки, второй блок элементов сравнения, третий блок экстраполяторов, последовательно соединенные четвертый сумматор, инерционное звено первого порядка, интегратор и пятьй сумматор, последовательно соединенные четвертый элемент сравнения, четвертый фильтр низкой частоты, второй
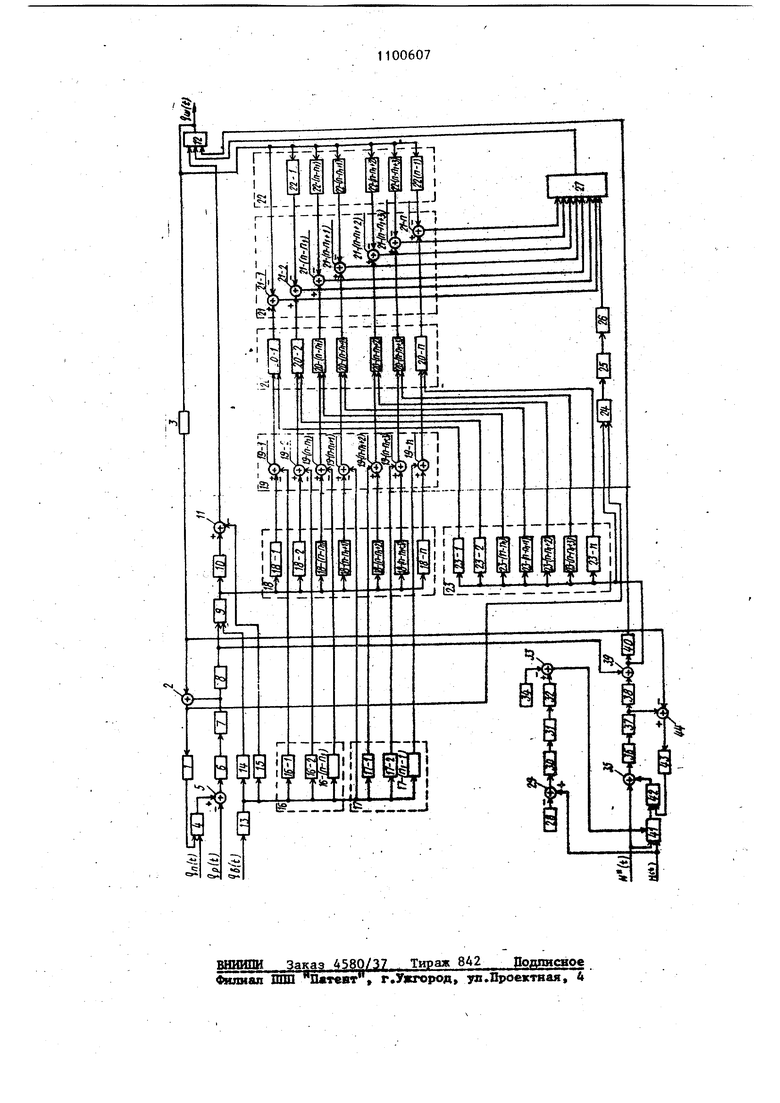
пропорционально-интегральный блок, пятый элемент сравнения,.вторая модель объекта регулирования и шестой сумматор, последовательно соединенные пятый фильтр низкой частоты, шес55 той элемент сравнения и третий экстраполятор, лоследовательно соединенные первый источник постоянного сигнала, седьмой элемент сравнения, блок определения модуля, реле, блок определения длительности ртказа и восьмо элемент сравнения, подключенный вторым входом к выходу второго источника постоянного сигнала, первый вход второго сумматора соединен с выходом третьего фильтра низкой частоты, второй вход второго сумматора соединен с выходом второго элемента задержки, вход которого соединен с выходом второго фильтра низкой частоты выход второго сумматора соединен с входом первого экстраполятора соединенного своим выходом с первым входом третьего элемента сравнения, второй вход которого соединен с выходом второго экстраполятора, подклю ченного своим входом к выходу второго фильтра низкой частоты, выход третьего элемента сравнения соединен с одним из входов третьего сумматора входы экстраполяторов первого блока экстраполяторов соединены с выходом второго сумматора, входы экстраполяторов второго блока экстраполяторов соединены с выходом второго фильтра низкой частоты, входы элементов задержки второго блока элементов задер ки соединены с выходом второго фильтра низкой частоты, первые входы элементов сравнения второго блока элементов сравнения соединены с выхо дами соответствующих экстраполяторов первого блока экстраполяторов, вторые входы элементов сравнения второго блока элементов сравнения соедине ны с выходами соответствующих экстра поляторов второго блока экстраполято ров, с выходом второго фильтра низкой частоты и с выходами соответству ющих элементов задержки второго блока элементов задержки, выходы элемен тов сравнения второго блока элементов сравнения соединены с первыми входами соответствующих сумматоров первого блока сумматоров, йторые входы которых соединены с выходами соответствующих экстраполяторов треть его блока экстраполяторов, соединенных своими входами с выходами шестого элемента сравнения, первый вход четвёр того сумматора соединен с выходом второго элемента сравнения, второй вход - с выходом шестого элемента сравнения, элементов сравнения первого блока элементов сравнения соединены с другими входами пятого сумматора, выход которого соединен с одним из входов третьего сумматора, второй вход пятого элемента сравнения соединен с выходом первого элемента задержки, второй вход шестого элемента сравнения соединен с выходом третьего фильтра низкой частоты, выход шестого сумматора соединен с входом четвертого элемента сравнения, второй вход шестого сумматора соединен с выходом переключателя, первый информационный -вход которого соединен с вторым входом седьмого элемента сравнения, а второй информационный вход переключателя соединен с вторым входом четвертого элемента сравнения, управляющий вход переключателя соединен с выходом восьмого элемента сравнения, выход третьего экстраполятора соединен с одним из входов третьего сумматора. ,. На чертеже приведена блок-схема предлагаемого устройства. Устройство содержит первый блок регулирования, состоящий из первой моделей 1 объекта регулирования в виде инерционного звена первого порядка, второго элемента 2 сравнения, первого элемента 3 задержки, первого сумматора 4, первого элемента 5 сравнения, первого фильтра 6 низкой частоты, первого пропорционально-интегрального блока 7, третьего фильтра 8 низкой частотыJ второго сумматора 9, первого экстраполятора 10, третьего элемента 11 сравнения, третьего сумматора 12, второго фильтра 13 низкой частоты, второго элемента 14 задержки, второго экстраполятора 15, блока коррекции, включающего в себя второй блок 16 экстраполяторов в количестве ( -/Hi) (в зависимости от требуемой точности расчетов п 20-40 - число интервалов & с , на которое делится интервал запаздывания в канале регулирования; п, 15-30 - число интервалов it, на которое делится интервал запаздывания влияния изменений расхода возврата на величину уровня) с 16-1 по 16-(л - П,), второй блок 17 элементов задержки в количестве (п,- 1) с 17-1 по 17-(п,-1) первый блок 18 экстраполяторов в количестве ti с 18-1 по 18-h, второй блок 19 элементов сравнения в количестве (1 с 19-1 iio 19-п , первый блок 20 сумматоров в количестве h с 20-t по 20-П , первый блок 21 элементов сравнения в количестве п С 21-1 по 21-h первый блок 22 элементов задержки в количестве (П-1) с 22-1 по 22-(И -1), третий блок 23 экстраполяторов в количестве П с 23по 23-П , четвертый сумматор 24, ине ционное звено 25 первого порядка с единичным коэффициентом усиления, ин тегратор 26 и пятый сумматор 27, вто рой блок регулирования, состоящий из блока контрол достоверности сигнала об уровне шихты, включающего в себя, первый источник 28 постоянного сигнйЛа седьмой элемент 29 сравнения, блок 30 определения модуля, реле 31, блок 32 определения длительности отказа, восьмой элемент 33 сравнения и второй источник 34 постоянного сигнала, четвертого элемента 35 сравнения, четвертого фильтра 36 низкой частоты, второго пропорциональноинтегрального блока 37, пятого фильтра 38 низкой частоты, Лестого элемента 39 сравнения, третьего экстраполятора 40, переключателя 41, шесто го сумматора 42, второй модели 43 объекта регулирования в виде последовательно соединенных инерционного звена первого порядка и интегральног звена, пятого элемента 44 сравнения. Используемые в устройстве фильтры низкой частоты представляют собой апериодическое звено с единичным коэффициентом усиления, реализуемое в виде интегратора, охваченного отри цательной обратной связью. Пропорционально-интегральный блок реализуется в виде последовательно роединен ных усилителя, интегратора и суммато ра, причем второй вХод сумматора соединен с выходом усилителя. Экстрапо ляторы представляют собой реальное формирующее звено реализуемое, например, в виде усилителя, охваченного отрицательной обратной связью, включающей в с,ебя интегратор. Блок 32 определения длительности отказа представляет собой таймер, запуск которого осуществляется по сигналу с реле., На схеме обозначены: H(t) - сигнал о регулируемой выходной переменной - уровне шихты в промежуточном бункере в момент времени t ; H(t) сигнал о задании на величину уровня шихты в промежуточном бункере; . qp(t) - сигнал о расходе шихты, загружаемой в промежуточный бункер спекательного отделения; q,,(t) сигнал о первом контролируемом возмущении - расходе шихты из промежуточного бункера спекательного отделения; qy(t) - сигнал управления расходом шихты в шихтовом отделении. Устройство работает следующим образом. В первом блоке регулирования функционирует первь1Й модельный замкнутый контур регулирования без запаздывания, составленный из первой модели 1 объекта регулирования по каналу )ш запаздывания, получаемой уравнения (2) в виде . первого сумматора 4, первого элемента 5 сравнения, первого фильтра 6 низкой частоты, первого пропорциональноинтегрального блока 7 и второго элемента 2 сравнения. В этом модельном контуре регулирования реализуется операция неявного обращения динами- ческого оператора модели (3) объекта регулирования без запаздывания и оцениваются идеальные значения управляющего воздействия. Под идеальным управляющим воздействием при ре гул иров ании ( р t) понимается такое .значение расхода ( (i, (t) , которое обеспечивает выполнение условияп(1-Яр. Оценивание идеального управления осуществляется с задержкой на время запаздывания f в канале регули()ования путем расчетной корректировки фактически реализованного управления q,j,i-t, величина которой определяется в зависимости от величины ошибки регулирования с (t1 - ( (, (t) . : U(t-))(tl-c|p(t)l, где F uj - неявно реализуемый обрат- ный динамический оператор модели без запаздывания объекта регулирования по каналу с U) - 9 п Сигнал о расходе шихты Д 1) загружаемой в промежуточном бункере в первом сумматоре 4 суммируется с выходным сигналом первой модели 1 объекта регулирования. В результате этого на:Выходе первого сумматора формируется ВЫХОДНОЙ сигнал первого модельного контура регулирования c(t). Этот сигнал поступает на вход первого элемента 5 сравнения, где из вычитается сигнал (tl датчика расхода шихты из промежуточного бункера Полученный сигнал небаланса поступает на первый фильтр 6 низкой частоты, подавляющий высокочастотные составляющие сигнала. С выхода фильтра поступает на вход первого, пропорционально-интегрального блока 7 на вькоде которого формируется модель ный управляющий сигнал (t -1 ) пер вого модельного контура регуо 1ирования Этот сигнал и представляет собой оцен ку идеального управления, обеспечивающего равенствос „ ( )-(р(1 ), Сигнала ц (i-J) в третьем фильтре 8 низкой частоты усредняется на интервале .t-l и поступает на вход второго сумматора 9. Одновременно сигнал Яы f ) поступает на вход второго элемента 2 сравнения, где из него вычитаетсяcjy(t -t ) о фактически реализованном управлении, поступающий с выхода третьего сумматора 12 через первый элемент 3 задержки. Полученный сигнал небаланса подается на вход первой модели 1 объекта регулиро вания. Сигнал о втором контролируемом воз мущении - расходе возврата - учитывается следующим образом. Сигнал Q j (i ) поступает на второй фильтр 13 низкой частоты, где усредняется на интервале времени t , так как при дальнейшей его обработке используются именно усредненные его значения. С помощью фильтра 13 устраняeтdя в некоторой мере и высокочастотная помеха. Сигнал с выхода второго фильтра 13 поступает на второй элемент 14 задержки, на выходе которого формируется сигналС ц (t -(.). Во втором сумматоре 9 сигнал ( -i-i) суммируется с сигналом ы с выхода третьего фильтра низкой частоты, В результате сигнал на выходе второго сумматора 9 соответствует модельному управлению пер.вого модельного контура регулирования, приведенного к; базовому уровню расхода возврата( (t -о ). В данном случае в качестве базового принят нулевой расход возврата. Изменения ((j( -i ) направлены на компенсацию неконтролируемых возмущений, влияющих (t ), 1 него 07 .12 В первом экстраполяторе 10, выполненнрм, например, в виде реального формирующего звена, сигнала (-t -о ) экстраполируется на интервал времени С + Л ) и поступает на вход третьего элемента 11 сравнения. Сигнал с выхода второго фильтра 13 низкой частоты во втором экстраполяторе 15 экстраполируется на-интервал ( + t) и поступает на второй вход третьего элемента 11 сравнения, где вычитается из сигнала с выхода первого экстраполятора 10. Тем самым экстраполированное приведенное управление пересчитывается на условия экстраполируемого на тот же момент времени расхода возврата и получается прогнозируемое на момент времени (f -t-bS) модельное управление первого модельного контура регулирования с ц ( +i2), поступающее на вход третьего сумматора 12. Во втором блоке регулирования функ|ционирует второй модельный замкнутый контур регулирования, составленный из второй модели 43 объекта регулирования по каналу Q - Н без запаздывания , получаемой из уравнений (1) и в виде (,, р(Тр + П шестого сумматора 42, четвертого элемента 3.5 (Сравнения, четвертого фильтра 36 низкой частоты, второго пропорционально-интегрального блока 37 и пятого элемента 44 сравнения. В этом модельном контуре регулирования реализуется операция неявного обращения динамического оператора модели (4) объекта регулирования без запаздывания и оцениваются идеальные значения управляющего воздейвтвия, обеспечива- . ющего вьтолнение равенства H(t) H(t). Сигнал об уровне шихты H(t) в промежуточном бункере с датчика уровня через переключатель 41 поступает в щестой сумматор 42, где суммируется с выходным сигналом второй модели 43 объекта регулирования В результате этого на выходе шестого сумматора 42 формируется выходной сигнал H(t) второго модельного контура регулирования. Этот сигнал поступает на вход четвертого элемента 35 сравнения, где из него вычитается сигнал H(t). Полученный сигнал небаланса поступает на четвертый фильтр 36 низкой частоты, подавляющей высокочастотные составляющие сигнала, С выхода фильтра 36 сигнал поступает на вход второго пропорционально-интегрального блока 37, на выходе которого формируется модельный управляющий сигнал - С) второго модельного контура регулирования, Этот сигнал представляет собой с ценку идеального управления, обеспечивающего равенство H(t). (i.-t) H(t). Сигнал (t-г 1 в пятом фильтре 38 низкой частоты усредняется на интервале & и поступает на вход- шестого элемента 39 сравнения. Одновременно сигнал Cj (i - ) поступает на . пятого элемента срав нения, где из:Него вычитается сигнал (t - t ) о фактически реализованно управлении;, поступающий с выхода тре его сумматора 42 через первый элемен 3 задержки. Полученный сигнал небала са подается на. второй модели 43 объекта регулирования. В шестом элементе 39 сравнения из сигнала q,, (t - 1 ) вычитается сигнал i: (-t -L ), поступающий с выхода третьего фильтра 8 низкой частоты. В результате на выходе шестого элемента 39 сравнения формируется сигналистуСt -i ). Изменения этого сигнала направлены на компенсацию Неконтролируемых возмущений, влияющих на изменение уровня H(t), но некомпенсируемых с помощью первого блока регулирования. СигналЦ М-t ь ) в третьем экстраполяторе 40 экстраполируется на интервал ( + Л ) и поступает .на один из входов третьего сумматора 12. В блоке контроля достоверности сигнала об уровне сигнал H(t),ocTyпающий с датчика уровня шихты в пром жуточном бункере, сравнивается в х:едьмомэлементе 29 сравнения с сигналом Н , соответствующим, например, середине диапазона рабочих изменений сигнала H(t) при нормально функционирующем датчике уровня. Сигнал поступает с выхода первого источника 28 постоянного сигнала. Сигнал небаланса с выхода седьмого элемента 29 сравнения поступает на вход блока 30 определения модуля, на выходе которо го формируется сигнал, равный /H(t) Н®/. Сигнал с выхода блока 30 определения модуля поступает на вход реле 31. Порог срабатывания реле 31 за дается исходя из максимально допустимого значения /H(t) - Н /, соответ 1 7 ствующего достоверному значению H(t). Если величина сигнала на выходе блока 30 определения модуля превышает величину порога срабатывания, реле 31 включает блок 32 определения длительности отказа. Сигнал на выходе блока 32 определения длительности отказа соответствует величине интервала времени, прошедшего с момента срабатывания реле 31. При отключении реле 31 сигнал на выходе блока 32 определения длительности отказа обнуляется. Этот сигнал в восьмом элементе 33 сравнения сравнивается с сигналом, поступающим с выхода второго источника 34 постоянного сигнала. Сигнал с выхода второго источника 34 постоянного сигнала соответствует предельно допустимой длительности отказа датчика уровня. Если сигнал с выхода блока 32 определения длительности отказа превьшает сигнал с выхода второго источника постоянного сигнала, с выхода восьмого элемента 33 сравнения поступает сигнал на управляющий вход переключателя 41. Переключатель 41 соединяет свой выход с вторым входом, подавая на вход шестого сумматора 42 сигнал H(t) вместо сигнала H(t). Это тому, что величина сигнала приводит к (-t -L ). на выходе шестого элеменсравнения падает до нулевого значения. Соответственно снижается до нуля и сигнал на выходе третьего экстраполятора 40. Таким образом, при отказе датчика уровня шихты в промежуточном бункере второй блок регулирования прекращает корректировать управляющие воздействия по фактическим изменениям уровня шихты. При восстановлении работоспособности датчика уровня сигнал на выходе блока 30 .определения модуля становится меньше порога срабатывания реле 31, это реле размыкается, блок 32 определения длительности отказа обнуляется, сигнал на выходе восьмого элемента 33j сравнения становится равным нулю, переключатель 41 соединяет свой выход с первьм входом. На вход шестого сумматора 42 вновь поступает сигнал H(t) и второй блок регулирования начинает функционировать в нормальном режиме. В блоке коррекции формируется корректирующее воздействие по разности между управлениями, необходимыми для компенсации контролируемых и неконтролируемых возмущений и фактически реализованными управлениями на интер вале памяти объекта регулирования. Для этого сигнал с выхода второго . фильтра 13 низкой частоты поступает на входы второго блока 16 экстраполя торов и второго блока 17 элементов задержки. С помощью второго блока 16 экстраполяторов сигнал о расходе возврата оg(t) экстраполируется на интервал (с-) в экстраполяторе 16-1, на интервал () в экстраполяторе 16-2, на интервал ьС в экстраполяторе 16-(п -п). Во втором блоке 17 элементов задержки сигнал Q-(t ) задерживается на время 4 в элементе 17-1 задержки, на время 2 iii в элементе 17-2 задержки, на время (Cj-ut) в элементе 17-(1,- 1) задержки. Сигнал( (t ) с выхода второго сумматора 9 поступает на входы первого блока 18 экстраполяторов где экс раполируется на интервал времени t экстраполятора 18-1, на интервал вре мени Со -bt) в экстраполяторе 18-2, на интервал времени ALB экстраполят ре 18- п . Сигнал йС| yj (t ) с выхода шестого элемента 39 сравнения, поступает на входы третьего блока 23 э страполято ров, где экстраполируется на интерва времени i в экстраполя-торе 23-1, на интервал времени (1 -ic) в экстрапо ляторе 23-2, на интервал времени д в экстраполяторе 23-И . Сигнал U ц, ( ) выхода третьего сумматора 12 поступает на входы первого блока 22 элементов задержки, где задерживается на время i с в эле менте 22-1 задержки, на время 2Ы в элементе 22-2 задержки, на время ) в элементе 22-( П - 1) задержки . С выходов экстраполяторов первого блока 18 экстраполяторов сигналы поступают на первые входы соответствующих элементов сравнения второго бло ка 19 элементов сравнения, где из них вычитаются сигналы с выходов экстраполяторов второго блока 16 экс раполяторов (в элементах 19-1 19-(П -ti) сравнения), с выхода второго фильтра 13 низкой частоты (в эл менте 19-((1 -n,-f 1) сравнения), с выходов элементов задержки второго блока 17 элементов задержки (в элементах 19-(п -п,+ 2) - 19-и сравнения). 07 В результате на выходах элементов сравнения второго блока 19 элементов сравнения формируются модельные управления первого блока регулирования, прогнозируемые на интервал времени t на выходе элеМента 19-1 сравнения, на интервал времени (С -U.L ) на выходы элемента 19-2 сравнения, на интервал времени и С на выходе i та 19-h сравнения. Эти сигналы по- ступают на первые входы соответствующих сумматоров первого блока 20 сумматоров, где суммируются с сигналами, поступающими с выходов соответствующих экстраполяторов третьего блока 23 экстраполяторов. На выходах сумматоров .первого блока 20 сумматоров формируются сигналы прогнозируемых на интервалы времени u.J - 2 модельных управлениях первого блока регулирования, скорректированные с учетом экстраполируемых на интервалы it - ь модельных регулирующих воздействий второго блока регулирования. Сигналы с выходов сумматоров первого блока 20 сум-, маторов поступают на первые входы элементов сравнения первого блока 21 элементов сравнения. Здесь из них вычитаются сигнал с выхода третьего сумматора 12 (в элементе 21-1 сравнения) и сигналы с выходов соотв тствующих элементов задержки первого блока элементов задержки (в элементах 21-2 - 21-П сравнения). Таким образом, на выходах элементов сравнения первого блока 21 элементов сравнения формируются сигналы, равные разности между прогнозируемыми модельными управлениями, обеспечивающими компенсацию контролируемых возмущений в моменты времени t (t - + ut )j и фактически реализованными в эти моменты времени управлениями. Сигналы с выхода второго элемента 2 сравнения и с выхода шестого элемента 39 сравнения поступают на входы четвертого сумматора 24, формируется сигнал, равный разности между модельными управлениями и фактически еализованным управлением на момент ремени (t -& ). Сигнал с выхода четертого сумматора 24 поступает на нерционное звено 25 первого порядка единичным коэффициентом усиления временем инерции, равным времени нерции первой модели объекта регулирования. Сигнал с выхода инерционного звена 25 поступает на вход интегратора 26. Ка выходе интегратора 26 формируется сигнал коррекции управляющего воздействия для компенсации ошибок регулирования, обусловленных неравенством модельных и фактически реализованных к моменту времени (i - ) управлений. Сигнал с выхода интегратора 26 поступает на вход пятого сумматора 27, где суммируется с сигналами с выходов элементов сравнения первого блока 21 элементов сравнения. В результате этого на выходе пятого сумматора 27 формируется сигнал коррекции управления по разности между модельными и фактически реализованными управлениями на всем интервале памяти объекта регулирования. Сигнал с выхода пятого сумматора 27 поступает на один из входов третьего сумматора 12 Таким образом, на выходе третьего сумматора 12 формируется сигнал управления расходом шихты в шихтовом отделении аглофабрики с учетом текущего рассогласования производительности шихтового отделения (по шихте с возвратом) и спекательного отделения, изменений расхода возврата, изменений уровня в промежуточном бункере спекательного отделения и ошибок управления на интервале памяти объекта регулирования. Предлагаемая система регулирования является системой с косвенным оцениванием возмущений и относится к классу разомкнутых систем при условии адекватности модели объекта. В таких системах проблема устойчивости отсутствует. Однако в реальности модель объекта не адекватна. В этом случае устойчивость обеспечивается смещением параметров модели в следующих направлениях: коэффициентов усиления и постоянных времени запазды вания - к максимальным значениям, и постоянных времени инерции - к минимальным значениям. Настройки блока коррекции, осуществляющего коррекцию управления по обратной связи, выбираются с использованием известных методов. При этом необходимо ориентироваться на обобщенный объект управления, содержащий объект управления по каналу(- Н и все блоки предлагаемого устройства (за исключением блока коррекции), и на остаточное возмущение, т.е. такое возмущение, которое не подавляется в разомкнутой системе регулирования. Предлагаемое устройство позволяет повысить надежность системы согласования производительности шихтового и спекательного отделений агломерационной фабрики за счет введения двух независимых блоков регулирования, обеспечивающих слежение производительности шихтового отделения за производительностью спекательного отделения и поддержание заданного, уровня в промежуточном бункереспекательного отделения. При отказе любого из блоков регулирования устройство в целом сохраняет свою работоспособность. Кроме того, расширяются функциональные возможности устройства за счет того, что учитывается не только возмущение по расходу шихты из промежуточного бункера, но и второе возмущение, обусловленное изменениями расхода возврата. Моделирование системы согласования производительности шихтового и спекательного отделении агломерационной фабрики показывает, что применение предлагаемого устройства позволяет снизить колебания уровня в промежуточном бункере спекательного отделения на 20-30% по сравнению с системами, где применяется известное устройство, которое может быть принято за базовый объект. Это, в свою очередь, может дать экономический эффект порядка 100 тыс.руб. в год на одну агломашину.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для согласования производительности технологических участков | 1976 |
|
SU634245A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
