(54) ПРИВОД ШПИНДЕЛЯ ДЛЯ ВИБРАЦИОННОГО РЕЗАНИЯ
1
Изобретение относится к станкостроению, в частности к силовым головкам металлорежущих станков, осуществляющих обработку методом вибрационного резания.
Известны приводы шпинделей для вибрационного резания, содержащие корпус, в котором размещен кривошипно-шатунный механизм с ползуном, передающий колебательное движение штоку
Недостатком известных приводов является отсутствие возможности: плавного регулирования амплитуды колебаНИИ.
Цель изобретения - обеспечение плавного регулирования амплитуды колебаний.
Поставленная цель достигается уем, что привод снабжен шарнирно соединенными между собой общей осью двумя рычагами, один из которых шарнирно соединен с корпусом, а другой со. штоком, обоймой с направляющими и механизмом их фиксации,установленной на ползуне с возможностью возвратно-поступательного перемещения, роликами, установленными на общей оси рычагов с возможностью контак- тирования с направляющими, причем
последние выполнены с возможностью поворота, а зависимость амплитуды колебаний штока от угла поворота направляющих определяется выражением
4v4 4Ve 8 4eFfW2
где ..X - амплитуда колебаний штока; f и L - соответственно длины 4aroBf
о( - угол поворота направляющих;
е - эксцентриситет кривошип15ного пальца приводного вала.
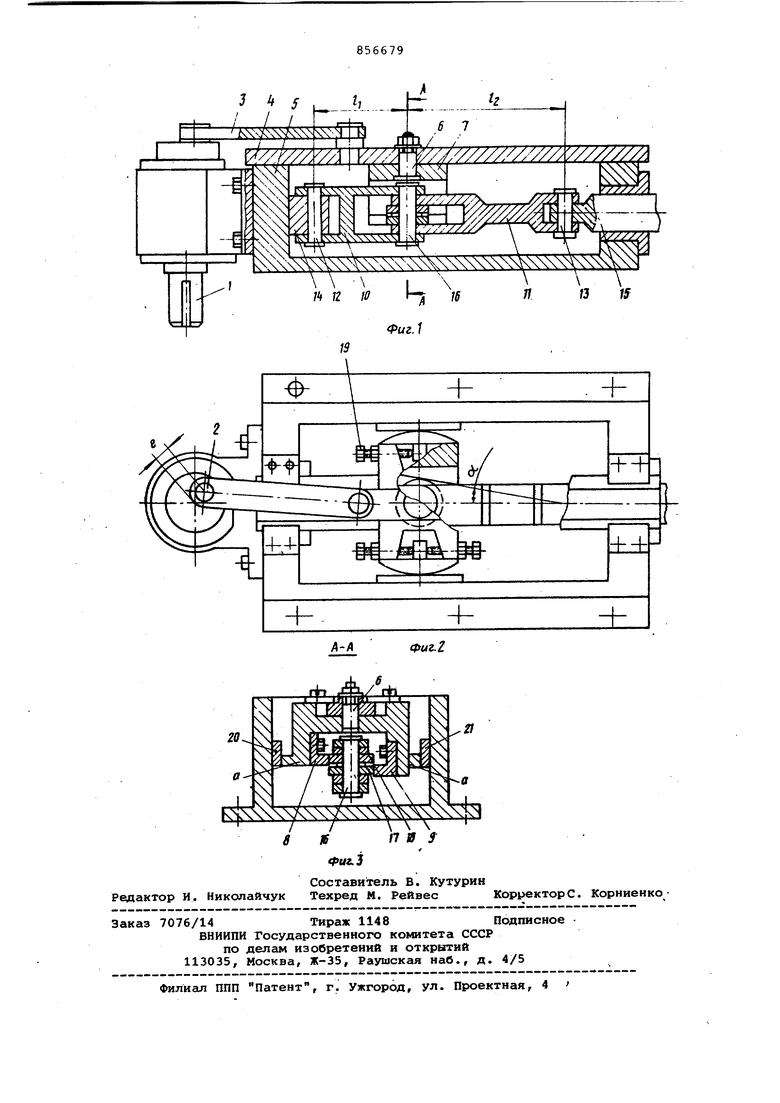
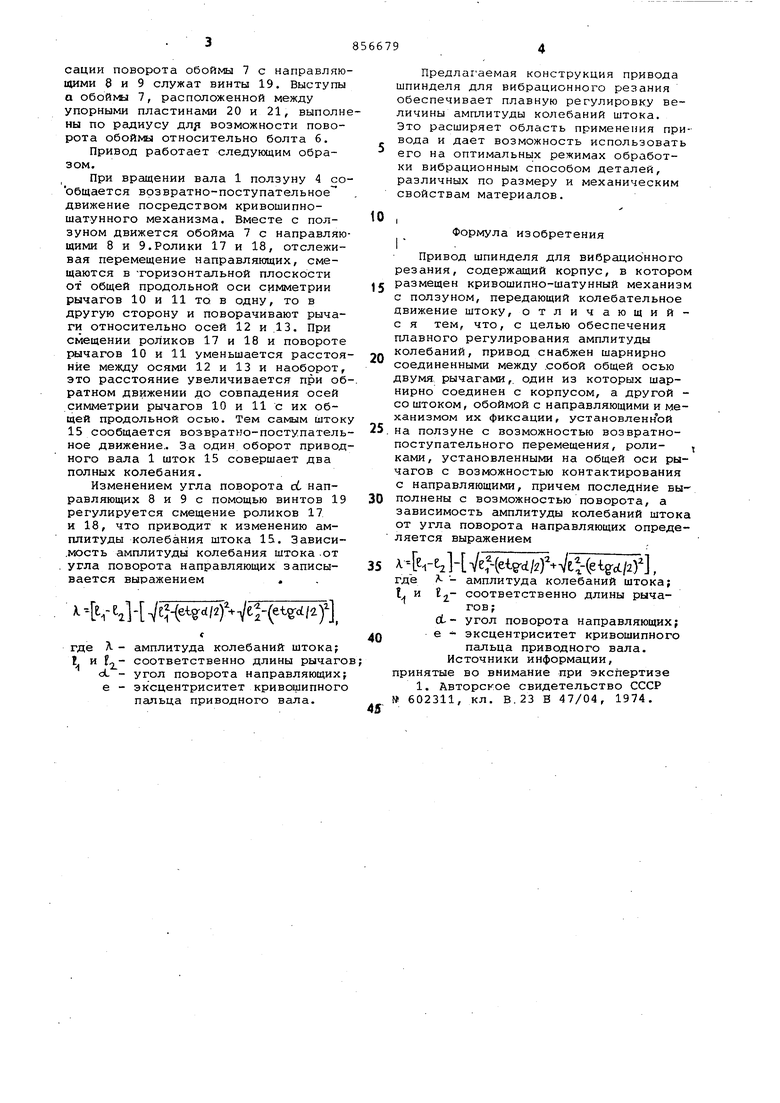
На фиг. 1 изобржен предлагаелый привод, разрез; на фиг.. 2 - то же, вид сверху; на фиг. 3. - разрез А-А 20 на фиг. 1.
Привод шпинделя содержит вал 1 с кривошипным пальцем 2, шатун 3, ползун 4, установленный в пазах передней и задней стенок корпуса 5. На 25 ползуне 4 болтом 6 Закреплена обойма 7, в которой размещены направляющие 8 и 9. Рычаги 10 и 11 соединены осями 12 и 13 с задней опорой 14 и штоком 15. На общей ори 16 рычагов 30 установлены ролики 17 и 18. Для фиксации поворота обоймы 7 с направляю щими 8 и 9 служат винты 19. Выступы а обоймл 7, расположенной между упорными пластинами 20 и 21, выполн ны по радиусу длц возможности поворота обоймы относительно болта 6. Привод работает следунхцим образом. При вращении вала 1 ползуну 4 со общается возвратно-поступательное движение посредством кривошипношатунного механизма. Вместе с ползуном движется обойма 7 с направляю щими 8 и 9.Ролики 17 и 18, отслеживая перемещение направляющих, смещаются в -горизонтальной плоскости от общей продольной оси симметрии рычагов 10 и 11 то в одну, то в другую сторону и поворачивают рычаги относительно осей 12 и .13. При смещении роликов 17 и 18 и повороте рычагов 10 и 11 уменьшается расстоя нйе между осями 12 и 13 и наоборот, это расстояние увеличивается при об ратном движении до совпадения осей симметрии рычагов 10 и 11 с их общей продольной осью. Тем самым шток 15 сообщается возвратно-поступатель ное движение,. За один оборот привод ного вала 1 шток 15 совершает два полных колебания. Изменением угла поворота d направляющих 8 и 9 с помощью винтов 19 регулируется смещение роликов 17 и 18, что приводит к изменению амплитуды колебания штока 15. Зависи.мость амплитуды колебания штока -от . угла поворота направляющих записывается выражением -.. где Л - амплитуда колебаний штока; I и ,, соответственно длины рычаго oL - угол поворота направляющих е - эксцентриситет кривошипного пальца приводного вала. Предлагаемая конструкции привода шпинделя для вибрационного резания обеспечивает плавную регулировку величины амплитуды колебаний штока. Это расширяет область применения привода и дает возможность использовать его на оптимальнь х режимах обработки вибрационным способом деталей, различных по размеру и механическим свойствам материалов. Формула изобретения Привод шпинделя для вибрационного резания, содержащий корпус, в котором размещен кривошипно-шатунный механизм с ползуном, передающий колебательное движение штоку, отличающийс я тем, что, с целью обеспечения плавного регулирования амплитуды колебаний, привод снабжен шарнирно соединенными между .собой общей осью двумя рычагами,. один из которых шарнирно соединен с корпусом, а другой со штоком, обоймой с направляющими и механизмом их фиксации, установленнЪй на ползуне с возможностью возвратнопоступательного перемещения, роли- , нами, установленными на общей оси рычагов с возможностью контактирования с направляющими, причем последние выполнены с возможностью поворота, а зависимость амплитуды колебаний штока от угла поворота направляющих определяется выражением -&rt2l- Ve(et ci/2rWtt-(, где - амплитуда колебаний штока; I и соответственно длины рычагов;et- угол поворота направляющих; е - эксцентриситет кривошипного пальца приводного вала. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 602311, кл. В.23 В 47/04, 1974.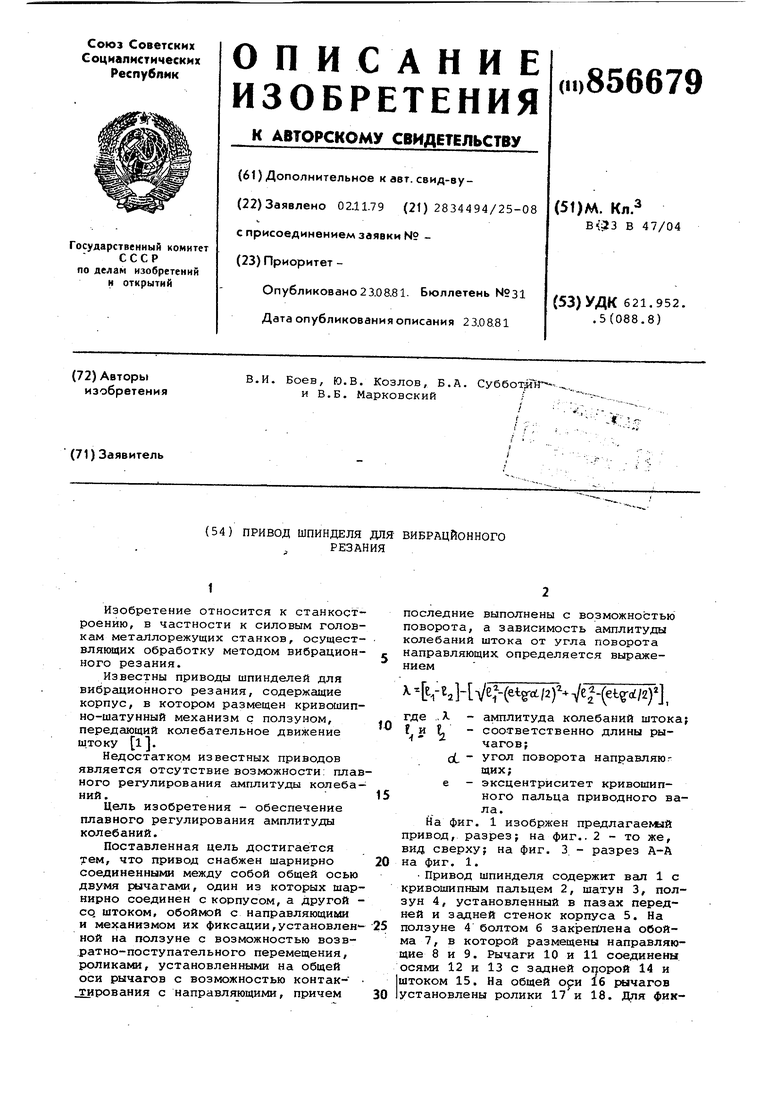
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дуговой сваркиС КОлЕбАНияМи элЕКТРОдА | 1977 |
|
SU795809A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1982 |
|
SU1062542A1 |
| Привод шпинделя для вибрационного резания | 1986 |
|
SU1373488A1 |
| Устройство для обработки сложных поверхностей на токарном станке | 1978 |
|
SU764849A1 |
| Кривошипно-ползунный механизм | 1980 |
|
SU1011937A1 |
| Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях | 1983 |
|
SU1132167A2 |
| Устройство для регулирования светового потока в кинокопировальном аппарате | 1983 |
|
SU1163306A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2006 |
|
RU2343280C2 |
| Регулируемый привод шпинделя тангенциальных вибраций | 2023 |
|
RU2802666C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |