(54) УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОПУЛЬСИВНОЙ УСТАНОВКОЙ СУДНА С ВИНТОМ РЕГУЛИРУЕМОГО ШАГА
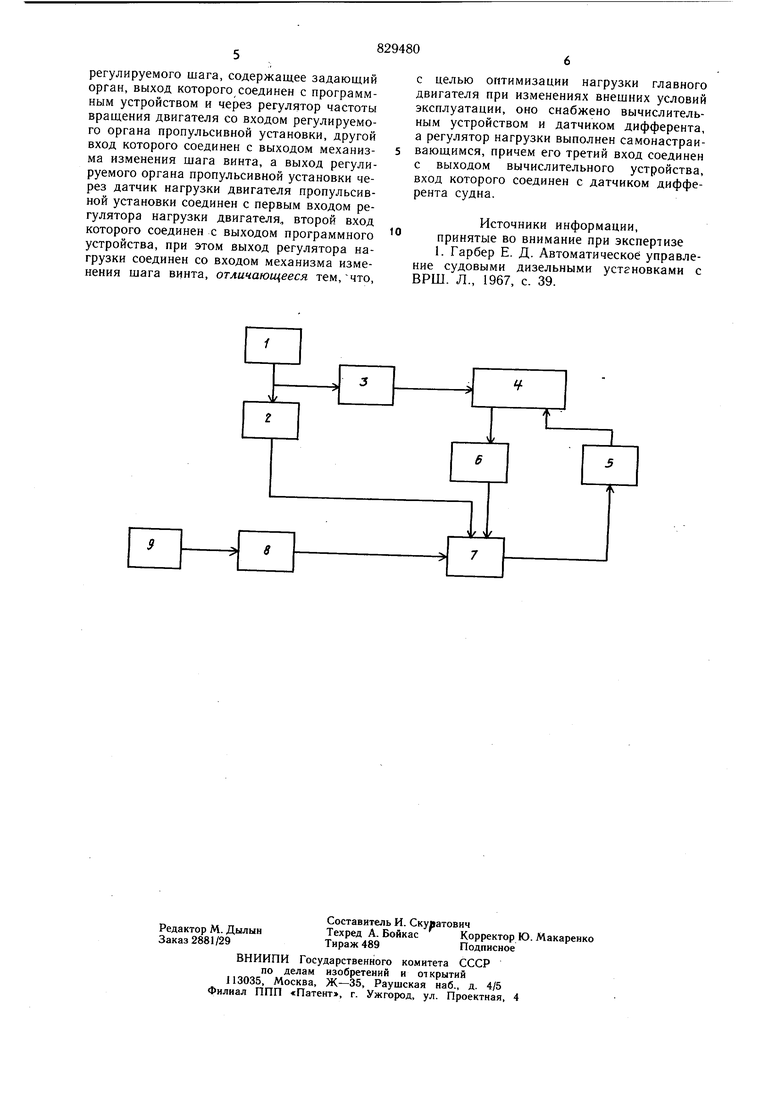
стройства 8, вход которого соединен с атчиком 9 дифферента судна.
Устройство работает следующим обраом.
С помощью задающего органа 1 устанавивают нужное значение нагрузки двигатея. Этот сигнал поступает на программное стройство 2 (функциональный преобразователь, реализующий программную зависимость в координатах крутящий момент - частота вращения двигателя) и через регуятор 3 частоты вращения двигателя на ход пропульсивной установки 4. Выходные сигналы с программного устройства 2 и датчика 6 нагрузки двигателя подаются на вход регулятора 7 нагрузки, где они сравниваются и где по величине общивки формируются управляющие воздействия, с помощью которых через, механизм 5 изменения щага винта щаг винта принимает такое положение, чтобы фактическое значение нагрузки двигателя стало равным заданному.
Каждое судно в зависимости от расположения его центра тяжести, гидродинамических характеристик корпуса и скорости хода характеризуется ходовым дифферентом (ХД) ©XL Различают дифферент на нос вн1 и на корму , среднее значение ХД, соответствующее ходу судна в спокойной воде, находят из равенства ..(1)
где в,т.л вк-тох соответственно максимальные значения носового и кормового дифферента, усредненные на нескольких периодах волнения, тогда текущее значение дифферента в указанной системе координат можно принять за расчетный дифферент ер
Расчетный дифферент и его максимальное значение определяют с помощью выражений
вр е-. - 0х - 0i (2)
ови|па -в|ч па /о
(О)
Момент начала первого управления определяют из условия
%/+ , (4)
где т: - момент времени при At некоторый временный интервал, найденный путем расчета или на основании эксперимента.
Второй момент переключения наиболее просто может быть найдет из условия О(5)
Принятие такого условия при применении одинакового закона управления в моменты первого и второго управления, но с разными знаками, гарантирует возможность приведения системы в исходное состояние.
Величина перемещения шага винта может быть найдена из следующих соображений. Уравнение механизма изменения щага (МИШ) в прирапхениях имеет вид
ДН Atn signr(6)
где лН -приращение величины щага винта; Ищйх -максимальное значение щага винта;
Д1и -длительность включения МИШ; Vh -скорость изменения щага винта Kh coMSi,si§K0-3HaK направления
изменения щага винта. С некоторой погрешностью удается путем применения модели получить искомую зависимость для некоторых наиболее вероятных параметров объекта управления в виде параметрической программы
А1„ Г(вя™оО (7)
И реализовать в вычислительном устройстве. Оптимизировать решение (7) предлагается за счет применения принципа самонастройки, осуществляемого самонастраивающимся регулятором по интегральному критерию качества в процессе самоанализа контролируемых изменений нагрузки двигателя. С учетом изложенного зависимость, реализуемую самонастраивающимся регулятором, можно представить в виде
А1„. Км(1н)Цвр«,(8)
$ где IH - интегральный критерий качества. При наличии внещних возмущающих воздействий на корпус судна (волнение) их влияние на нагрузку двигателя учитывается с помощью датчика дифферента судна и вычислительного устройства, реализующего
0 ф.ормулы 1, 2, 3, 4 и 5, а также с помощью самонастройки регулятора 7 нагрузки, реализующего зависимости 7 и 8, приведенные в описании.
Использование данного автоматизированного устройства управления пропульсивной установкой обеспечивает по сравнению с известными устройствами следующие преимущества: резко снижаются колебания мощности двигателя, вызываемые волновыми возмущениями, действующими на корпус судна (при волнении моря 5-6 баллов амплитуда колебаний мощности главного двигателя при фиксированном шаге ВРШ достигает 15°/о относительно заданного значения), что увеличивает надежность работы двигателя за счет улучшения качества процессов распыления, смесеобразования и сгорания топлива, снижает теплонапряженность деталей цилиндро-поршневой группы, механические напряжения в фундаментальном и коленчатом валу двигателя; полного использования мощности двигателя увеличивается средняя скорость хода судна; осуществляется автоматическая защита двигателя от перегрузок не только в долевых режимах нагрузки двигателя, но и в номинальном режиме.
Формула изобретения
Устройство автоматического управления пропульсивной установкой судна с винтом
регулируемого шага, содержащее задающий орган, выход которого соединен с программным устройством и через регулятор частоты вращения двигателя со входом регулируемого органа пропульсивной установки, другой вход которого соединен с выходом механизма изменения щага винта, а выход регулируемого органа пропульсивной установки через датчик нагрузки двигателя пропульсивной установки соединен с первым входом регулятора нагрузки двигателя, второй вход которого соединен с выходом программного устройства, при этом выход регулятора нагрузки соединен со входом механизма изменения щага винта, отличающееся тем, что,
с целью оптимизации нагрузки главного двигателя при изменениях внешних условий эксплуатации, оно снабжено вычислительным устройством и датчиком дифферента, а регулятор нагрузки выполнен самонастраивающимся, причем его третий вход соединен с выходом вычислительного устройства, вход которого соединен с датчиком дифферента судна.
Источники информации, принятые во внимание при экспертизе 1. Гарбер Е. Д. Автоматическое управление судовыми дизельными устгновками с ВРШ. Л., 1967, с. 39.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления пропульсивной установкой судна с винтом регулируемого шага | 1980 |
|
SU919937A2 |
| Система автоматического управления | 1979 |
|
SU780684A2 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система управления главными дмигателями судовой силовой установки и винтом регулируемого шага | 1979 |
|
SU856894A1 |
| Система управления судовым двигателем | 1989 |
|
SU1703554A1 |
| Откидная поворотная колонка | 1982 |
|
SU1104049A1 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1978 |
|
SU700375A1 |
| Способ совместного управления винтом регулируемого шага и главным судовым двигателем | 1982 |
|
SU1100199A1 |
| Система управления главными двигателями судовой силовой установки и винтом регулируемого шага | 1981 |
|
SU990587A2 |
| Устройство для управления судовым оборудованием | 1983 |
|
SU1117255A1 |
