1
Изобретение относится к области подъемно-транспортного оборудования, а именно к гидравлическим грузоподъемным кранам.
Известен гидравлический грузоподъемный кран, содержащий опорную колонну, грузовую стрелу, перемещающуюся вдоль колонны, и гидроцилиндры подъема и поворота стрелы fl .
Недостатком известного крана является ограниченность зоны его обслуживания в вертикальной плоскости .
Цель изобретения - увеличение зоны обслуживания в вертикальной плоскости.
Для достижения этой цели колонна выполнена с направляющими и снабжена горизонтальным копиром, имеющим участок спуска, а стрела снабжена ползуном, установленным в напра вляющих колонны, и роликом для взаимодействия с копиром, причем шток гидроцилиндра подъема стрелы снабжен башмаком, охватывающим ролик, на колонне смонтирована поворотная консоль, ось поворота которой смещена относительно геометрической оси колонны, и один конец консоли соединен со штоком гидроцилиндра поворота стрелы, а другой ее конец имеет обойму, охватывающую ползун стрелы в ее верхнем положении.
Кроме того, с целью уменьшения размеров копира, кран снабжен дополнительным гидроцилиндЕюм для вертикального перемещения поворотной консоли после выхода ролика стрелы за участок спуска копира, а консоль снабжена пальцем, взаимодействующим через упорный подшипник со штоком дополнительного гидроцилиндра.
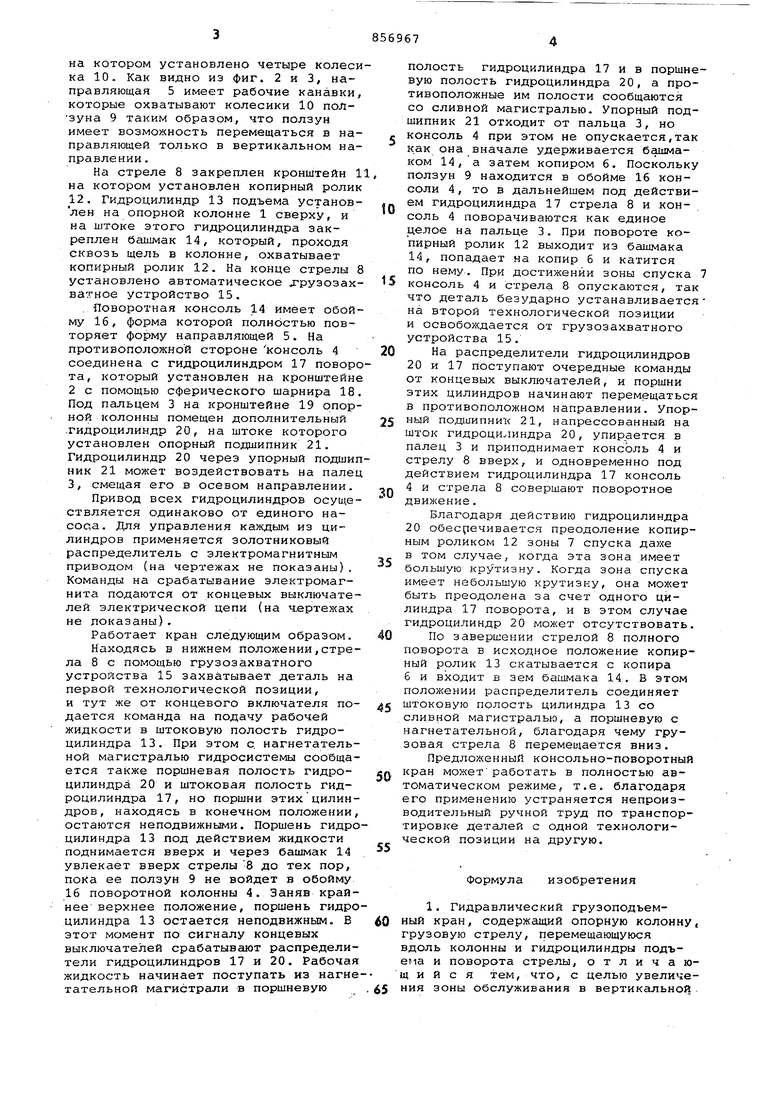
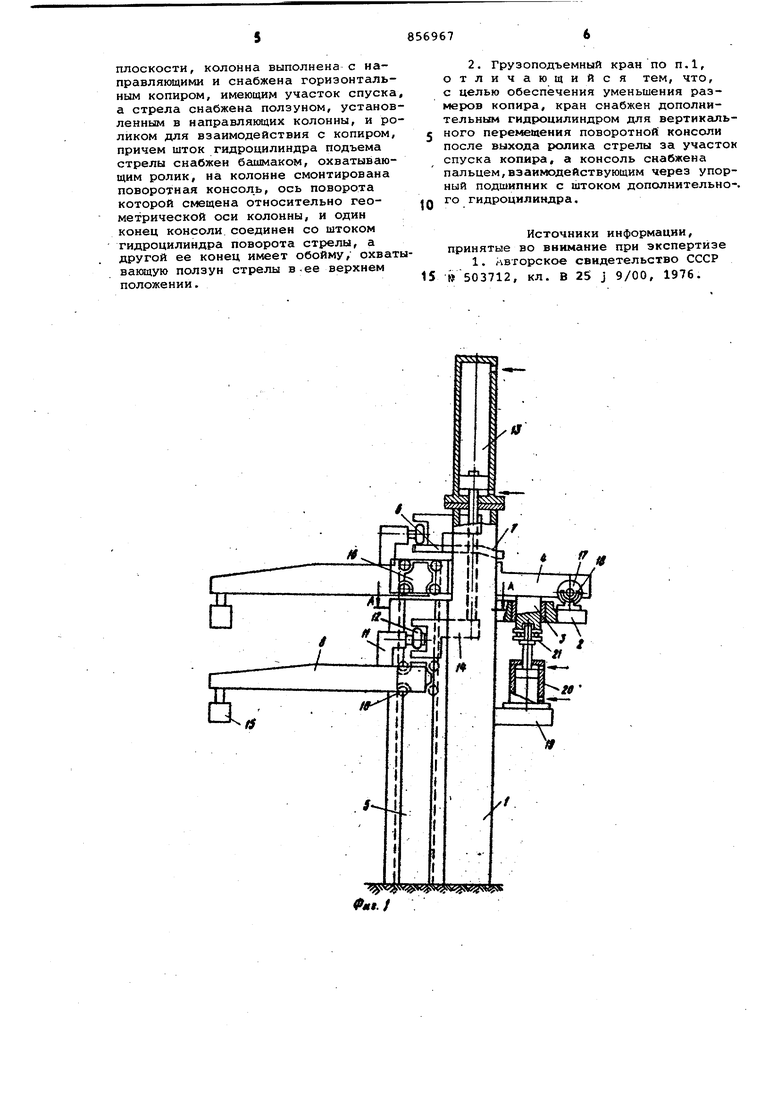
На фиг. 1 - кран, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг.1.
Опорная колонна 1 неподвижно закреплена на основании. На колонне 1 предусмотрен кронштейн 2, в котором установлен палец 3 шарнирного крепления поворотной консоли 4.Колонна 1 выполнена с вертикальной направлянндей 5, а в верхней части к колонне приварен горизонтальный копир 6. Беговая дорожка копира вы полнена по дуге окружности, центр которой расположен на оси пгшьца 3. На конце копир имеетучасток 7 спуска. В направляющих 5 установлена грузовая стрела 8. Стрела 8 оборудована вы30 .полненным с ней заодно ползуном 9
на котором установлено четыре колесика 10. Как видно из фиг. 2 и 3, направляющая 5 имеет рабочие канавки, которые охватывают колесики 10 ползуна 9 таким образом, что ползун имеет возможность перемещаться в направляющей только в вертикальном направлении .
На стреле 8 закреплен кронштейн 1 на котором установлен копирный ролик 12, Гидроцилиндр 13 подъема установлен на опорной колонне 1 сверху, и на штоке этого гидроцилиндра закреплен башмак 14, который, проходя сквозь щель в колонне, охватывает копирный ролик 12. На конце стрелы 8 установлено автоматическое д рузозакватное устройство 15.
. Поаоротная консоль 14 имеет обойму 16, форма которой полностью повторяет форму направляющей 5. На противоположной стороне консоль 4 соединена с гидроцилиндром 17 поворота, который установлен на кронштейне 2 с помощью сферического шарнира 18, Под пальцем 3 на кронштейне 19 опорной колонны помещен дополнительный .гидроцилиндр 20, на штоке которого установлен опорный подшипник 21, Гидроцилиндр 20 через упорный подшипник 21 может воздействовать на палец 3, смещая его в осевом направлении.
Привод всех гидроцилиндров осуществляется одинаково от единого насос,а. Для управления каждым из цилиндров применяется золотниковый распределитель с электромагнитным приводом (на чертежах не показаны). Команды на срабатывание электромагнита подаются от концевых выключателей электрической цепи (на ч.ертежах не показаны).
Работает кран следующим образом.
Находясь в нижнем положении,стрела 8 с помощью грузозахватного устройства 15 захватывает деталь на первой технологической позиции, и тут же от концевого включателя подается команда на подачу рабочей жидкости в штоковую полость гидроцилиндра 13, При этом с. нагнетательной магистралью гидросистемы сообщается также поршневая полость гидроцилиндра 20 и штоковая полость гидроцилиндра 17, но поршни этих цилиндров, находясь в конечном положении, остаются неподвижными. Поршень гидроцилиндра 13 под действием жидкости поднимается вверх и через башмак 14 увлекает вверх стрелы 8 до тех пор, пока ее ползун 9 не войдет в обойму 16 поворотной колонны 4. Заняв крайнее верхнее положение, поршень гидроцилиндра 13 остается неподвижным. В этот момент по сигналу концевых выключателей срабатывают распределители гидроцилиндров 17 и 20. Рабочая жидкость начинает поступать из нагнетательной магистрали в поршневую
полость гидроцилиндра 17 и в поршневую полость гидроцилиндра 20, а противоположные им полости сообщаются со сливной магистралью. Упорный подшипник 21 отходит от пальца 3, но консоль 4 при этом не опускается,так к.ак она вначале удерживается башмаком 14, а затем копиром 6. Поскольку ползун 9 находится в обойме 16 консоли 4, то в дальнейшем под действием гидроцилиндра 17 стрела 8 и консоль 4 поворачиваются как единое целое на пальце 3. При повороте копирный ролик 12 выходит из башмака 14, попадает на копир б и катится по нему. При достижении зоны спуска консоль 4 и стрела 8 опускаются, так что деталь безударно устанавливается на второй технологической позиции и освобождается от грузозахватного устройства 15,
На распределители гидроцилиндров 20 и 17 поступают очередные команды от концевых выключателей, и поршни этих цилиндров начинают перемещаться в противоположном направлении. Упорный подшипник 21, напрессованный на шток гидроци шндра 20, упир ается в палец 3 и приподнимает консоль 4 и стрелу 8 вверх, и одновременно под действием гидроцилиндра 17 консоль 4 и стрела 8 совершают поворотное движение.
Благодаря действию гидроцилиндра 20 обесречивается преодоление копирным роликом 12 зоны 7 спуска даже в том случае, когда эта зона имеет большую крутизну. Когда зона спуска имеет небольшую крутизну, она быть преодолена за счет одного цилиндра 17 поворота, и в этом случае гидроцилиндр 20 может отсутствовать.
По завершении стрелой 8 полного поворота в исходное положение копирный ролик 13 скатывается с копира 6 и входит в зем башмака 14, В этом положении распределитель соединяет штоковую полость цилиндра 13 со сливной магистралью, а поршневую с нагнетательной, благодаря чему грузовая стрела 8 перемещается вниз.
Предложенный консольно-поворотный кран можетработать в полностью автоматическом режиме, т,е, благодаря его применению устраняется непроизводительный ручной труд по транспортировке деталей с одной технологической позиции на другую.
Формула изобретения
1. Гидравлический грузоподъемный кран, содержащий опорную колонну, грузовую стрелу, перемещающуюся вдоль колонны и гидроцилиндры подъема и поворота стрелы, отличающийся тем, что, с целью увеличения зоны Обслуживания в вертикальной
плоскости, колонна выполнена с направляющими и снабжена горизонтальным копиром, имеющим участок спуска, а стрела снабжена ползуном, установленным в направляющих колонны, и роликом для взаимодействия с копиром, причем шток гидроцилиндра подъема стрелы снабжен башмаком, охватывающим ролик, на колонне смонтирована поворотная консодь, ось поворота которой смещена относительно геометрической оси колонны, и один конец консоли соединен со штоком гидроцилиндра поворота стрелы, а другой ее конец имеет обойму, охватывающую ползун стрелы в-ее верхнем положении.
2. Грузоподъемный кран по п.1, отличающийся тем, что, с целью обеспечения уменьшения размеров копира, кран снабжен дополнительным гидродилиндром для вертикального перемещения поворотной консоли после выхода ролика стрелы за участок спуска копира, а консоль снабжена пальцем,взаимодействующим через упорный подшипник с штоком дополнительно-, го гидроцилиндра.
0
Источники информации, принятые во внимание при экспертизе
1. авторское свидетельство СССР 15 №503712, кл. В 25 j 9/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОПОДЪЕМНЫЙ БАШЕННЫЙ КРАН | 1971 |
|
SU422679A1 |
| Механизм подъема стрелы манипулятора | 2018 |
|
RU2682866C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ПЕРЕДВИЖНОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2002 |
|
RU2238236C2 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА И ДЕМОНТАЖА | 2001 |
|
RU2225344C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| ДВУХСТРЕЛОВОЙ КРАН НА КОЛОННАХ ДЛЯ МОНТАЖА ИЗ СБОРНЫХ СТРОИТЕЛЬНЫХ ЭЛЕМЕНТОВ СООРУЖЕНИЙ | 1966 |
|
SU178461A1 |
fO
If
utJ
