(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| Электрогидравлический следящий привод | 1980 |
|
SU1048893A1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД? | 1972 |
|
SU331973A1 |
1
Изобретение относится к гидроавтоматике и может быть применено, например, для воспроизведения заданных знаков нагружения при прочностных испытаниях машиностроительных конструкций.
Известен электрогидравлический следящий привод, содержащий задающее устройство, блоки управления двумя щаговыми двигателями электрогидравлического преобразователя, связанными с золотником последнего через передачу винт-гайка, и исполнительный гидродвигатель с датчиком обратной связи 1.
Недостатком известного привода является малое быстродействие.
Цель изобретения - повышение быстродействия.
Указанная цель достигается тем, что привод снабжен инвертором, двумя преобразователями напряжения в частоту и электрическим усилителем рассогласования, входами подключенным к задающему устройству и к датчику обратной связи и охваченным цепью обратной связи, содержащий электрическую модель электродгидравлического преобразователя, а выходами - к блокам управления, при этом к одному из последних - через преобразователь напряжения, а к другому - через инвертор и второй преобразователь напряжения.
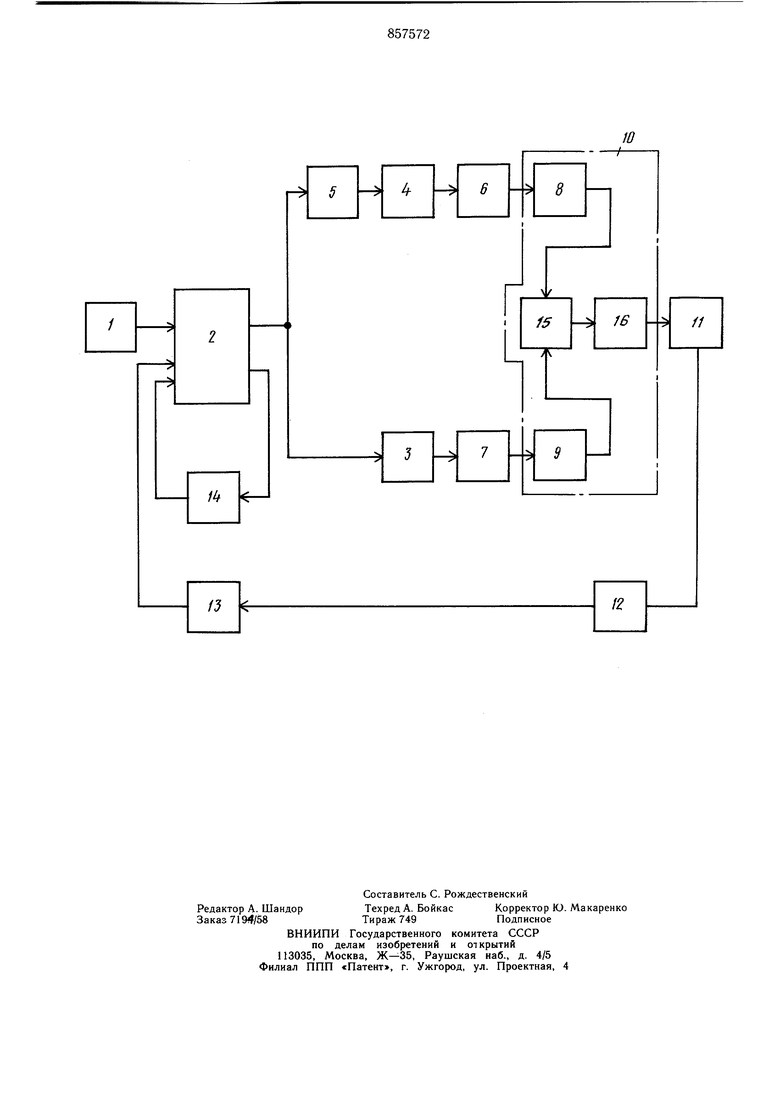
На чертеже изображена схема электрогидравлического следящего привода.
Программно-задающее устройство 1 подключено к входу электрического усилителя рассогласования 2, выход которого соединен с преобразователями 3 и 4 напряжения в частоту, причем с преобразователем 3
Q непосредственно, а с преобразователем 4 - через инвертор 5. Далее преобразователи напряжения в частоту последовательно соединены с блоками управления 6 и 7, которые управляют щаговыми двигателями 8 и 9 электрогидравлического преобразователя 10, соединенного гидравлически с рабочими полостями гидродвигателя 11, который воздействует на объект регулирования 12 и имеет датчик 13 обратной связи, связанный с входом электрического усилителя рассогласования 2.
20 Усилитель рассогласования 2 охвачен цепью обратной связи, в которой установлена электрическая модель 14 электрогидравлического преобразователя 10. Электрогидравлический преобразователь 10 включает шаговые двигатели 8 и 9, связанные через передачу винт-гайка 15 с золотниковым распределителем 16. Электрогидравлический следящий привод работает следующим образом. При изменении заданного сигнала, сигнал с выхода усилителя рассогласования 2 поступает на входы преобразователей 3 и 4 напряжение-частота, причем на вход одного преобразователя через инвертор 5. Таким образом, частота импульсов на выходе одного преобразователя уменьшается, на выходе другого - увеличивается. Затем, частотный сигнал последовательно поступает на блоки управления 6 и 7 и шаговые двигатели 8 и 9. Вследствие разности частот импульсных сигналов, поступающих на шаговые двигатели 8 и 9, они вращаются с различной скоростью и через передачу винт-гайка 15 происходит перемещение золотника распределителя 16. Рабочая жидкость поступает в гидродвигатель 11, который воздействует на объект 12, связанный с датчиком 13 обратной связи, сигнал с которого поступает на усилитель рассогласования 2. При равенстве сигнала задатчика 1 и датчика 13 обратной связи движение золотника распределителя 16 прекращается. Одновременно с выхода усилителя рассогласования 2 сигнал поступает на вход электрической модели 14, выходной сигнал которой, пропорциональный перемешению золотникового распределителя 16, подается на вход усилителя 2 и корректирует напряжение рассогласования. Таким образом, движение гидродвигателя 11 осуществляется в соответствии с изменением сигнала рассогласования, скорректированного по перемещению золотника электрогидравлического преобразователя. Введение электрического усилителя рассогласования 2, инвертора 5 и преобразователей напряжение-частота 3 позволяет повысить быстродействие привода, так как обработка сигнала рассогласования осуществляется не одним, а одновременно двумя щаговыми двигателями. Благодаря использованию электрической модели 14 электрогидравлического преобразователя 10 происходит преобразование передаточной функции электрогидравлического преобразователя из интегрирующего звена в апериодическое звено. Постоянная времени апериодического звена существенно меньще постоянной времени интегрирующего звена. Требуемая величина постоянной времени апериодического звена подбирается коэффициентом усиления усилителя рассогласования 2. Это позволяет расширить частотный диапазон воспроизведения заданных сигналов, и, следовательно, также повышает быстродействие привода. Применение изобретения позволит повысить быстродействие систем, предназначенных для воспроизведения заданных знаков нагружения при прочностных испытаниях машиностроительных конструкций, Формула изобретения Электрогидравлический привод, содержащий задающее устройство, блоки управления двумя шаговыми двигателями электрогидравлического преобразователя, связанными с золотником последнего через передачу винт-гайка, и исполнительный гидродвигатель с датчиком обратной связи, отличающийся тем, что, с целью повышения быстродействия, привод снабжен инвертором, двумя преобразователями напряжения в частоту и электрическим усилителем рассогласования, входами подключенным к задающему устройству и к датчику обратной связи и охваченным цепью обратной связи. содержащей электрическую модель электрогидравлического преобразователя, а выходами - к блокам управления, при этом к одному из последних - через преобразователь напряжения, а к другому - через инвертор и второй преобразователь напряжения. Источники информации, принятые во внимание при экспертизе 1. Сосонкин В. Л. и др. Электрогидравлический следящий привод подачи для стыков и роботов с ЧПУ. Тезисы докладов Всесоюзного научно-технического совещания по применению гидравлической автоматики и промышленности, г. Харьков. М., «Наука, 1977, с. 107, рис. 1.
