1
Изобретение относится к автомати-, ческому управлению и может быть использовано при управлении летательными аппаратами.
Наиболее близкой по технической сущности к предлагаемой является система автопилота в канапе стабилизации крена, состоящая из последовательно соеднненных первого сумматора и первого корректирующего второго сумматора, усилителя с переCTpaHBaehOiiM козффициентом усиления, последовательно соединенных привода и объекта управления,состоящего из инерционногон интегрирующего привода и объекта управления,состоящего из инерционного и интегрирующего звена, выход которого через дифференциатор с , перестраиваем 1М козффнциентом усилени и форсирующее звено подключен ко входу второго сумматора, и через второе корректирующее звено - ко входу первого cy Iaтopa ГО.
Недостатком этой схемы является ее сложность и громоздкость из-за необходимости подключения к основному контуру цепей самонастройки, а также инерционность процесса само, настройки.
Цель изобретения - повьшение бы стродействия и упрощение системы...
Поставленная цель достигается тем, что в систему введены релейный злемент, вход которого подключен к выходу первого корректирующего звена, а выход - ко входу привода.
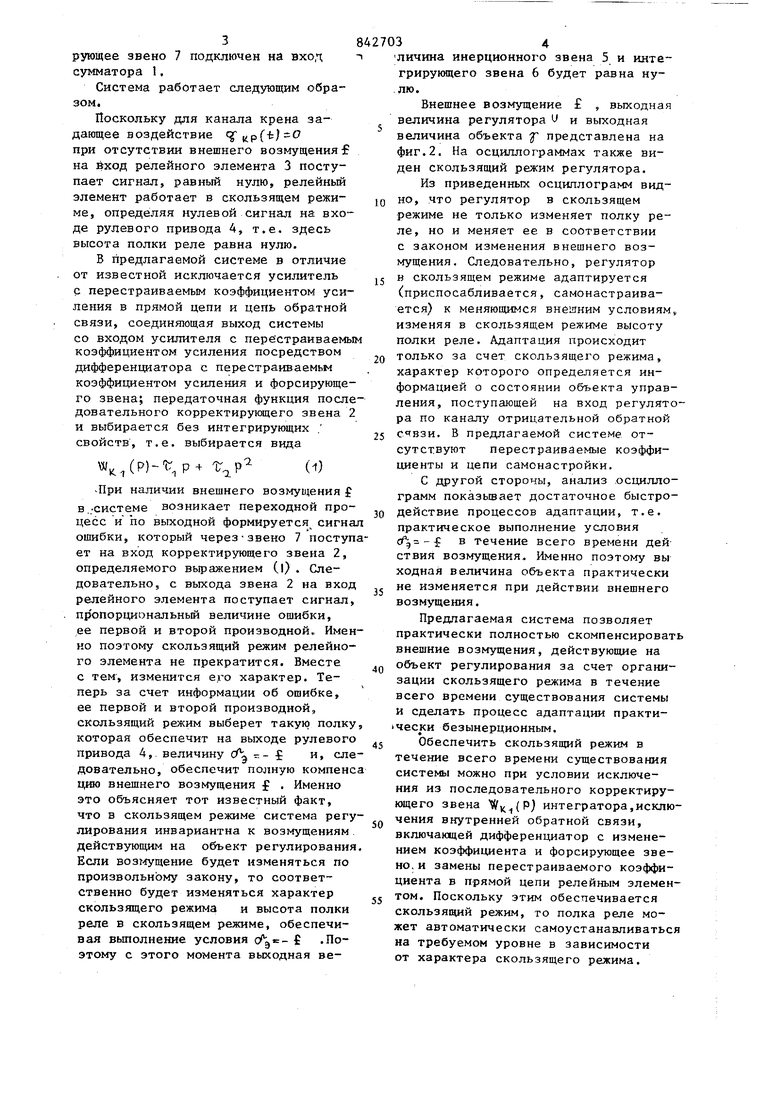
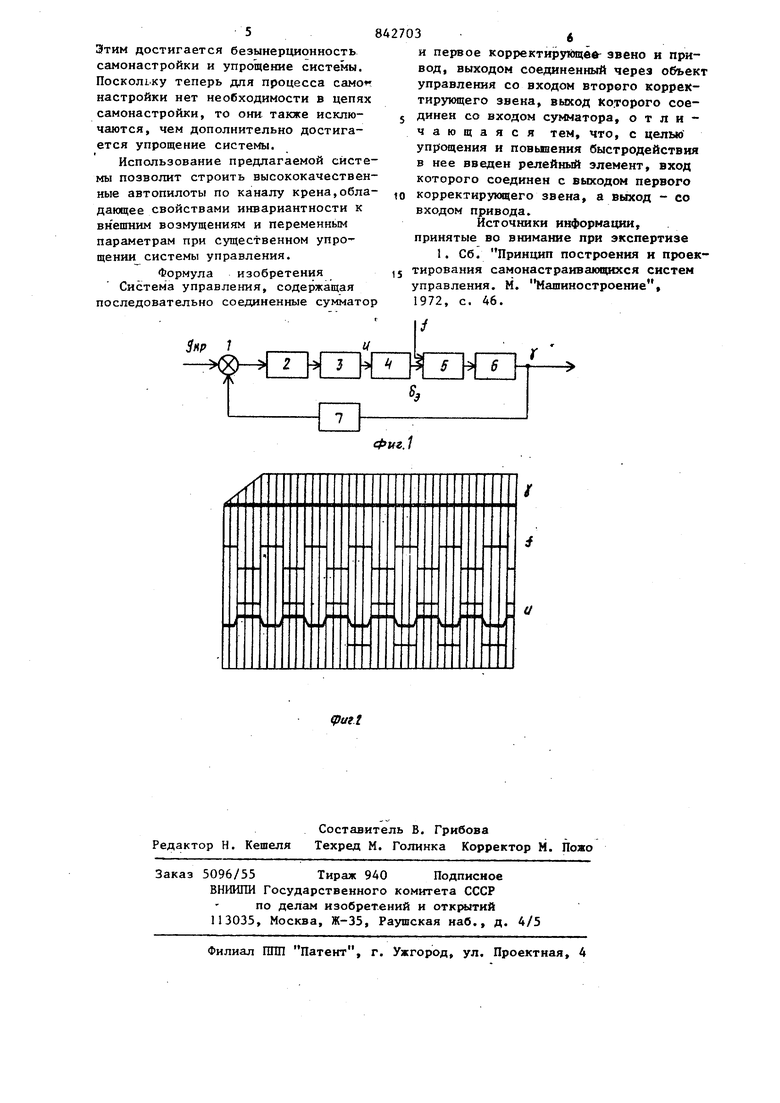
На фиг.1 представлена схема предлагаемой системы; на фнг.2 - осциллоrpaf o i работы системы.
Система содержит последовательно соединенные сумматор I, первое корректирующее звено 2, релейный злемент 3, рулевой .привод 4, объект регулирования, состоящий из инерционного 5 и интегрирующего 6 звеньев, выход которого через второе KoiipeKTHрую1 Чее звено 7 подключен на вход сумматора 1. Система работает следующим образом. Поскольку для канала крена задающее воздействие кр()О при отсутствии внешнего возмущения на вход релейного элемента 3 поступает сигнал, равный нулю, релейный элемент работает в скользящем режиме, определяя нулевой сигнал на входе рулевого привода 4, т.е. здесь высота полки реле равна нулю. В предлагаемой системе в отличие от известной исключается усилитель q перестраиваемым коэффициентом усиления в прямой цепи и цепь обратной связи, соединяющая выход системы со входом усилителя с перестраиваемы коэффициентом усиления посредством дифференциатора с перестраиваемьн коэффициентом усиления и форсирующего звена; передаточная функция после довательного корректирующего эвена 2 и выбирается без интегрирз«ощих . свойств, т.е. выбирается ввда W(P) (1) -При наличии внешнего возмущения f в...системе возникает переходной процесс Vho выходной формируется сигна ошибки, который через-звено 7 поступ ет на вход корректир ощего звена 2, определяемого выражением (1 . Следовательно, с выхода звена 2 на вход релейного элемента поступает сигнал . пропорциональньй йеличине ошибки, ,ее первой и второй производной. Имен но поэтому скользящий режим релейиого элемента не прекратится. Вместе с тем, изменится его характер. Теперь за счет информации об ошибке, ее первой и второй производной, скользящий режим выберет такую полку которая обеспечит на выходе рулевого привода 4,. величину Л - f и, сле довательно, обеспечит полную компен цию внешнего возмущения . Именно это объясняет тот известный факт. что в скользящем режиме система регу лирования инвариантна к возмущениям действующим на объект регулировани Если возмущение будет изменяться по произвольному закону, то соответственно будет изменяться характер скользящего режима и высота полки реле в скользящем режиме, обеспечивая выполнение условия f .Поэтому с этого момента выходная ве34ЛИЧина инерционного звена 5 и интегрирующего звена 6 будет равна нулю. Внешнее возмущение , выходная величина регулятора У и выходная величина объекта представлена на фиг.2. На осциллограммах также виден скользящий режим регулятора. Из приведенных осциллограмм видно, что регулятор в скользящем режиме не только изменяет полку реле, но и меняет ее в соответствии . с законом изменения внешнего возмущения. Следовательно, регулятор в скользящем режиме адаптируется / (приспосабливается, самонастраивается) к меняющимся внешним условиям, изменяя в скользящем режиме высоту полки реле. Адаптация происходит только за счет скользящего режима, характер которого определяется информацией о состоянии объекта управления, поступающей на вход регулятора по каналу отрицательной обратной счвзи. В предлагаемой системе отсутствуют перестраиваемые коэффициенты и цепи самонастройки. С другой стороны, анализ .осциллограмм показьшает достаточное быстродействие процессов адаптации, т.е, практическое выполнение условия ( в течение всего времени действий возмущения Именно поэтому вы ходная величина объекта практически не изменяется при действии внешнего возмущения. Предлагаемая система позволяет практически полностью скомпенсировать внешние возмущения, действующие на объект регулирования за счет организации скользящего режима в течение всего времени существования системы и сделать процесс адаптации практически безынерционным. Обеспечить скользящий режим в течение всего времени существования системы можно при условии исключения из последовательного корректирующего звена (Р) интегратора,искпючения внутренней обратной связи, включакщей дифференциатор с изменением коэффициента и форсирующее звено, и замены перестраиваемого коэффициента в прямой цепи релейным элементом. Поскольку этим обеспечивается скользящ1й режим, то полка реле может автоматически самоустанавливаться на требуемом уровне в зависимости от характера скользящего режима. 5 Этим достигается безынерционность самонастройки и упрощение системы. Поскольку теперь для процесса самог настройки нет необходимости в цепях самонастройки, то они также исключаются, чем дополнительно достигается упрощение системы. Использование предлагаемой систе мы позволит строить высококачествен ные автопилоты по каналу крена,обла дающее свойствами инвариантности к виешним возмущениям и переменным параметрам при существенном упро-щении системы управления. Формула изобретения Система управления, содержащая последовательно соединенные суммато
Знр 1 3 и первое корректирукице звено и привод, выходом соединенный через объект управления со входом второго коррехтирзпощего звена, выход которого соединен со входом сумматора, отличающаяся тем, что, с целью упрощения и повыпения быстродействия в нее введен релейный элемент, вход которого соединен с выходом первого корректирующего звена, а выход - со входом привода. Источники информации, принятые во внимание при экспертизе I. Сб. Принцип построения и проекирования самонастраивающееся систем правления. И. Машиностроение, 1972, с. 46.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
Фиг. 1
