(54) САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для электрохимического травления микропроволоки | 1981 |
|
SU956635A1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Система управления | 1979 |
|
SU842703A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
1
Изобретение относится к техническим средствам автоматического регулирования и может быть применено в различных отраслях народного хозяйства.
Известен адаптивный регулятор обиепромьшшенного назначения, содержащий ПИД-регулятор с контуром адаптации, в свою очередь включающим звенья упрошения, деления, суммирования (два звена) и фильтрация (два звена) с различными постоянными времени 1 .
Недостаток указанного устройства состоит в относительной сложности технической реализашш контура адаптации. Кроме того, сам принцип действия этого контура основан на анализе автоколебаTeaibHoro процесса в САР и автоматическом поддержании систем на границе уотойчивостя.
Наиболее близким к предлагаемому являеггся самонастраивающийся регулятор, содержащий сравнивающий элемент, шггегратор, первый сумматор и усилитель с регулируемым усилением 21.
Недостатком Известного устройства является низкая динамическая точность вследствие слабой компеясашш болыпого транспортного запаздывания объекта регулирования.
Цель Изобретения - повышение точности регулирования.
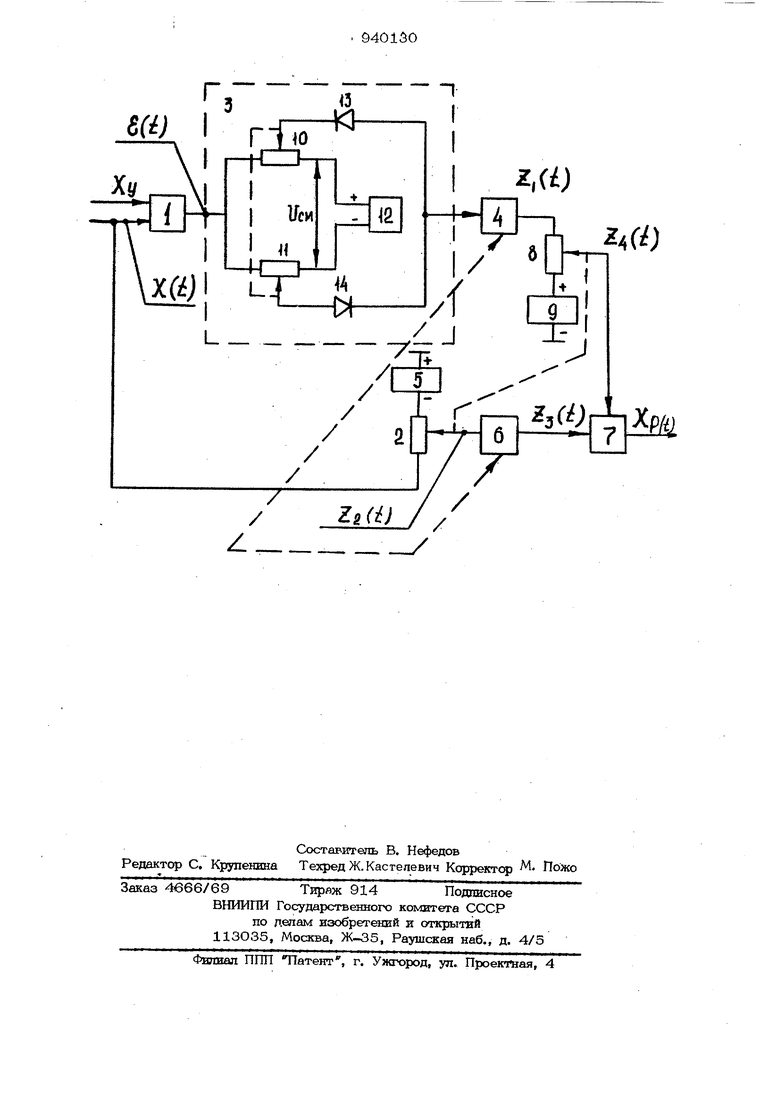
Указанная цель достигается тем, что в устройстве установлены второй суммаJQ тор, первый и второй источники см&цвния, форсирующий элемент и биполярное пороговое устройство с настраиваемой зсиой нечувствительности, подключенное входом к выходу сравнивающего элеменf5 та, а выходом через интегратор - к п ьъаму входу второго суммспюра, второй вход которого соединен с выходом второго источника смещения, а выход - с вхо- pfyM регулировки усиления усэапителя с
20 регулхфуемым усилением, сшпшльный вход которого подключен к выходу форсэярующего элемента, соеданеяногч) входом с выходом первого сумматора, подключенного первым входом р входу сравнивак ще го элемента, а вторым - к выхо ду первого Источника смешения, вход настройки первого сумматора механичес ки соединен с входом настройки второго сумматора, а вход настройки интегратора - с входом настройки форсирующего элемента. На чертеже представлена блок-схема предлагаемого уст1юйства. Устройство содержит сравнивающий элемент 1, первый сумматор 2, бипол5яр ное пороговое устройство 3 с настраиваемой зоной нечувствительности, интегратор 4, первый источник 5 смещения, форсируюпшй элемент 6, усилитель 7 с регулируемым усилением, второй сумма тор 8, второй источник 9 смешения, тре тий и четвертый сумматоры 10 и 11, третий источник 12 смещения, детекторы 13 и 14. Устройство работает следующим обра зом. По входным каналам в регулятор вво дят регулируемую величину Х( t ) и задание - Х( t ) подают одновременно на входы сравнивающего элемента 1 и первого сумматора 2. На выходе срав нивающего элемента 1 формируют сигаал ошибки регулирования (i) Xvj-X(-t) , который полают на биполярное пороговое устройство 3 с регулируемой зоной нечувствительности и затем интегрируют посредством интегратора 4. При этом выходной сигнал Z (t) интегратора 4 равен I. l1-dl)ett)ioLUcM d, U) n -J где Т П - посто5шная интегрирования; oL -. степшш нечувствительности. На выходе первого сумматора 2 формируют сигнал основного контура регутшрования l(t)kX(t)4(-K)B, 11) где В - сигнал первЬго источника 5 постоянного смешения, веошчина которого зависит от диапазона амеяевкя ретушируемой величины Х{ t ); К - коэффаниент передачи первохх сумматора 2{О К 1). При 10О%нном диапазоне изменения регулируемой величины В О. Сигнал 2 f2 ( i ) подают на вход форсирующего элемента 6, получая при этом на выходе последнего сигнал 2-( } равный IjCtlstiXitj+l-J-Kietk Т (t)(i-(c)e, где Тр - постоянная предварения. Сигнал Хэ, ( t ) является вxoдньпvl сигналом усилителя 7 с регулируемым усилением. Его коэффициент усиления К зависит от сигнала 1ф ( t ). В свою очередь сигнал 2( Ь ) формируют посредством второго сумматора 8 следующим образом: I(t)KA4H-K)Z()x xg{t),) где А - величина сигнала второго источника 9 постоянного смещения. Если коэф4вциент К прямо пропорционален 2 ( -Ь ), то окончательный вид закона регулирования Xpl.(t)(tJ .T,.-K)BJ, где 0(i) (l-d)eU)tdL . При К 1 реализуется пропорционально-дифференгдиальный ПД-закон регутшрования. Для устранения болнной статической ошибки регулирования при наличии параметрических возмущений в объекте коэффициент К изменяют в пределах О К 1. В этом случае при наличии ошибки регулирования ( t ) после отработки управляющего сигаала ПД-регулятором, сигнал Z( t ) в соответствии с (4) при oi. О получает поправку - у X dt в зависимости от знака t ( t ). Эта поправка вводегся по И-закону до устранения ошибки. Последующие входные возмущения компенсируются самонастраивающимся регулятором без перерегулирования, так как контур самойастройки посредством интегратора 4 всегда поддерживает в регуляторе оптимальцую настройку усиления. Параметрические же возмущения, как правило, не бывают ступенчатыми и успевают компенсироваться интегратором 4. При К О в соответствии с выражением (5) реализуется И-оакон регулирования. Таким образом, варьируя величину К при выборе настроек по показателю качества регутшрования, можно добиться оптимального сочетания действий , регуляторе ПД- и И-овеньев. Это обеспечивается жестким совмещением настро ки сумматоров. Совмещение настроек Tj и Т| базируется на известном опт мальном соотношениа между этими величинами, когда т :pl-Sconsi Практическая реапизашш блоков 1, 4, 6 и 7 вьшопнена на четырех микросхемах сер0и К553УД2, В блоке 7 регулируемая обратная связь обеспечивается примшением сштронного резистора типа ОЭП-12, Для реалззэации сумматоров использован сдвоенный потшшисилетр типа СПШ. Такой же потенциометр ис попьзован для настройки Тр/Т. Практическая реализация биполярного псрогоБого устройства 3 с настраиваемой нечувсгвкгеяьностьго также показана на чертеже. Сигнал сшибки ( t ) суммируется третьим сумматором Юс положительным смещением источника 12 смещения или четвертым сумматором 11 с отрицательным смещениетл этого же источника. На входе интегратора 4 сигнал появится только тогда, когда первое слагаемое в указанном уравнении по абсолютной величине с ганет больше втсфого слагаемого (откроются детекторь прямой или обратной проводимости). .Если амплитуда шлсокочастогных случайных возмущеиий на входе системы меньше величины зоны нечувствительнос ти устройства 3, то интегратор 4 на н:их не реагирует. Такое решение noason ег быстродействие интегратора 4 (снизить Тц), cojqpaHHB устойчивость всей системы при случайных высокочаототных возмущениях. 50 изобретения Формула Самонастраивающийся регулятор, содержащий сраБНИваюший элемент, интегратор, первый сумматор и усиптогель с регулируемым усилением, отличающийся тем, что, с цепью повыщения точности регулирования, в нем устано&лены второй cyrovi Top, первый и второй источники смещения, форсирующий элемент и биполярное пороговое устройство с настраиваемой зоной нечувствительносга, подключенное входом к выходу сравнивающего элемента, а выходом через интегратор - к первому входу второго сумматора, второй вход которого соединен с выходом втсрого источника смещения, а выход - с входом регулировки усвлеяяя усилителя с регулируемым усилением, сигнальный вход которого подключен к выходу форсирующего элемента, соедннейного входом с выходом переого сумматора, подключенного первым входом к входу сравнивающего элемента, а вторым к выходу первого источника смещения, вход настройки первого сумматора мехаввчески соединен с входом настройки второго сумматора, а вход настройки ннт&гратора - с входом настройки форсирующего элемента. Источники информации, принятые во внимание при экспертизе 1.Емельянов С. В. и др. Системное проектирование средств автоматизации. М., Машиностроетие, 1978, с. 45-5О. 2.Авторское свавдетельство СССР по заявке № 2836О97/22-О2/ кп.Сч О5 В 13/ОО, 1979 (прототип). Ш) I z,aj
