Z
00
tc
(
ел ел
1143
Изобретение относится к автоматике и может быть использовано при создании систем регулирования теплоэнергетическими и электроэнергетическими объектами и процессами, а также при управлении приводами станков и меха- ниамов.
Цель изобретения - повышение качества процессов регулирования и рас- ширение области использования.
На чертеже гфедставлена блок-схема регулятора.
Регулятор содержит первьй усили
Входной сигнал X, поступает на входы усилителя 1., блока 2 диффер цирования и на сумматор 7. На вто вход сумматора 7 поступает сигнал
тель 1, блок 2 дифференцирования, пер-}5 Х. Выходные сигналы усилителя 1
вый 3 и второй 4 выпрямители, первый 5, второй 6, третий 7 и четвертый 8 сумматоры, делитель 9 напряжения, усилитель 10 с переменным коэффициентом усиления, нелинейный блок 11 типа на-20 сьпцение, второй усилитель 12, инерционное звено 13, исполнительный механизм 14.
Передаточные функции блоков регулятора имеют вид первого усилителя 1 W(P)-K, где К, - коэффициент усиления усилителяJ блока 2 дифференцирования W(P) , где Kj - коэффициент усиления дифференциатора; усилителя 10 с переменным коэффициентом усиления W,o(P) KjCX), где К.СХ) - регулируемый коэффициент усиления, второго усилителя 12 W,(P) 7 Д К, - коэффициент усиления , инерционКв
25
30
кого звена 13 W,,(P)
6 й
-Де 35
коэффициент усиления и постоянная времени этого звена; исполни тельного механизма 14 W..(P)
где Ту постоянная времени интегри: рования.
.Обозначим выходные сигналы первого усилителя 1 Х блока 2 дифферен-. цирования 2 Х, первого сумматора 5 Xj, третьего сумматора 7 Х первого выпрямителя 3 Х, делителя 9 напряжения Xtt, четвертого сумматора 8 Х,, .
40
45
6 второго
го элемента
выпрямителя 4 Х,, нелинейно- насыщение
1t типа
а I ( iniiei паиоыцспш: С переменньм коэффициен-
усилителя
том усиления Х,, инерционного звена
13 X,,, второго сумматора 6 К,.
Тогда уравнения связи сигналов регулятора имеют вид
X, + Х + |Хб1
Л4
IX, - X,
МО.
Хо 1х,|IX. - X,
7
55
X
и
у у .
А л,,,
и блока 2 дифференцирования посту ют на сумматор 5, а с сумматора 7 .на вход выпрямителя 3. С выхода в рямителя 3 сигнал поступает на пе вход сумматора 8, на второй вход торого поступает сигнал с выхода лителя 9. С выхода сумматора 8 си нал подается на вход выпрямителя С выхода выпрямителя 4 сигнал пос пает на вход нелинейного блока 11 типа насьпцение, с выхода которо на второй вход усилителя 10 с пер менным коэффициентом усиления, на вый вход которого поступает сигна с сумматора 5. Выход усилителя 1 переменным коэффициентом усиления соединен на вход сумматора 6, вых которого подключен на вход усилит 12, охваченного инерционным звено 13 по закону отрицательной обратн связи. Выход усилителя 12 соедине с входом исполнительного механизм
При первоначальном подключении регулятора к объему усилителя 10 переменным коэффициентом усиления танавливается малый коэффициент у ления, что способствует плавному гону объекта регулирования вдоль ницы области ограничений и постеп ному переходу его в режим стабили ции. По мере уменьшения входных с налов X, и Xj коэффициент усилени усилителя 10 увеличивается, а в р ме стабилизации при определенных ках с помощью нелинейного блока типа насьщение он устанавливает оптимальным для данного режима ст лизации.
Как известно, усилители с упра емым коэффициентом усиления увели вают его прямо пропорционально вх ному сигналу, в то же время практ систем автоматического регулирова свидетельствует о том, что для пл
К,, Х,, X.
К„ Х,„при Х.„ X
°
чо
где X
0
1
допустимая величина, определяющая переход в режим стабилизации.
Регулятор работает следукнцим образом.
Входной сигнал X, поступает на входы усилителя 1., блока 2 дифференцирования и на сумматор 7. На второй вход сумматора 7 поступает сигнал
Х. Выходные сигналы усилителя 1
5 Х. Выходные сигналы усилителя 1
0
5
0
5
0
5
5
и блока 2 дифференцирования поступают на сумматор 5, а с сумматора 7 - .на вход выпрямителя 3. С выхода выпрямителя 3 сигнал поступает на первый вход сумматора 8, на второй вход которого поступает сигнал с выхода делителя 9. С выхода сумматора 8 сигнал подается на вход выпрямителя 4. С выхода выпрямителя 4 сигнал поступает на вход нелинейного блока 11 типа насьпцение, с выхода которого - на второй вход усилителя 10 с переменным коэффициентом усиления, на первый вход которого поступает сигнал с сумматора 5. Выход усилителя 10 с переменным коэффициентом усиления подсоединен на вход сумматора 6, выход которого подключен на вход усилителя 12, охваченного инерционным звеном 13 по закону отрицательной обратной связи. Выход усилителя 12 соединен с входом исполнительного механизма 14.
При первоначальном подключении регулятора к объему усилителя 10 с переменным коэффициентом усиления устанавливается малый коэффициент усиления, что способствует плавному разгону объекта регулирования вдоль границы области ограничений и постепенному переходу его в режим стабилизации. По мере уменьшения входных сигналов X, и Xj коэффициент усиления усилителя 10 увеличивается, а в режиме стабилизации при определенных ошибках с помощью нелинейного блока 11 типа насьщение он устанавливается оптимальным для данного режима стабилизации.
Как известно, усилители с управляемым коэффициентом усиления увеличивают его прямо пропорционально входному сигналу, в то же время практика систем автоматического регулирования свидетельствует о том, что для плав31
него разгона необходимо менять коэффициент усиления от меньшего к большему. Поскольку ошибка регулирования при разгоне по координатам Х и Х, изменяется от максимального к минимальному, то с помощью элементов 3, 4, 9 и 11 реализуется обратно пропорциональная зависимость от ошибки регулирования. Начальный коэффициент усиления управляемого усилителя 10 можно установить достаточно калым, в 40-80 раз меньше коэффициента усиления на режиме стабилизации, а в дальнейшем в регуляторе автоматически будет выбираться необходимый коэффициент для прохождения допустимой области по ограничениям.
Известно, что передаточная функция ПИД-регулятора имеет вид
1 + Т(Р
1
+ т;-р),(1) . и
коэффициент усиления; оператор Лапласа; постоянная времени интегрирования,
постоянная времени дифференцирования. передаточную функцию
ТиР +
Т«Р
laliP.
(2)
Передаточная функция регулятора с учетом передаточных функций блоков равна
W fP) - WpW - x(pj
K5(X,,j)j,
1 +
() J
К,, J
Из сравнения следует, что
) Кр(Х); Т,
выражений (2) и (4)
.
к,
TJ-i
Kili.
к,
(4)
(5) следует расчет Т
к,т, 5)
к.
к. Та
Таким образом, изменение Kj(X) не вносит изменения в значения остальных параметров регулятора.
Благодаря введению в структуру регулятора канала функ1у5онального преобразования двух координат в составе двух сумматоров, двух выпрямителей, делителя напряжения, нелинейного блока типа насыщение и усилителя с переменным коэффициентом усиления достигается возможность изменить коэффициент усиления регулятора, что позволяет осуществить с помощью одного регулятора три оп- тимальньк режима : разгон, торможение и стабилизацию, повысить качество процессов регулирования, сократить объем оборудования,увеличить функциональную гибкость и расширить область использования.
20 Формула изобретения
.
я;
25
30
с
35
40
45
50
Т
55
Многофункциональный регулятор, содержащий первый усилитель, последовательно соединенные блок дифференцирования и первый сумматор, последовательно соединенные второй сумматор, второй усилитель и инерционное звено, первый вход многофункционального регулятора соединен с входом первого усилителя и входом блока Дифференцирования, выход первого усилителя подключен к второму входу первого сумматора, выход второго усилителя соединен через исполнительный механизм с выходом многофункционального регулятора, выход инерционного звена соединен с вторым входом второго сумматора, отличающий- с я тем, что, с целью повышения качества процессов регулирования и расширения области использования, в него введены делитель напряжения и последовательно соединенные третий сумматор, первый выпрямитель, четвертый сумматор, второй выпрямитель, нелинейный блок типа насьщение и уси- литель с переменным коэффициентом усиления, причем второй вход многофункционального регулятора подсоединен к.первому входу третьего сумматора, второй вход которого подключен к входу блока дифференцирования, выход делителя напряжения соединен с вторым входом четвертого сумматора, выход первого сумматора связан с вторым входом усилителя с переменньи коэффициентом усиления, выход которого соединен с входом второго сумма тора.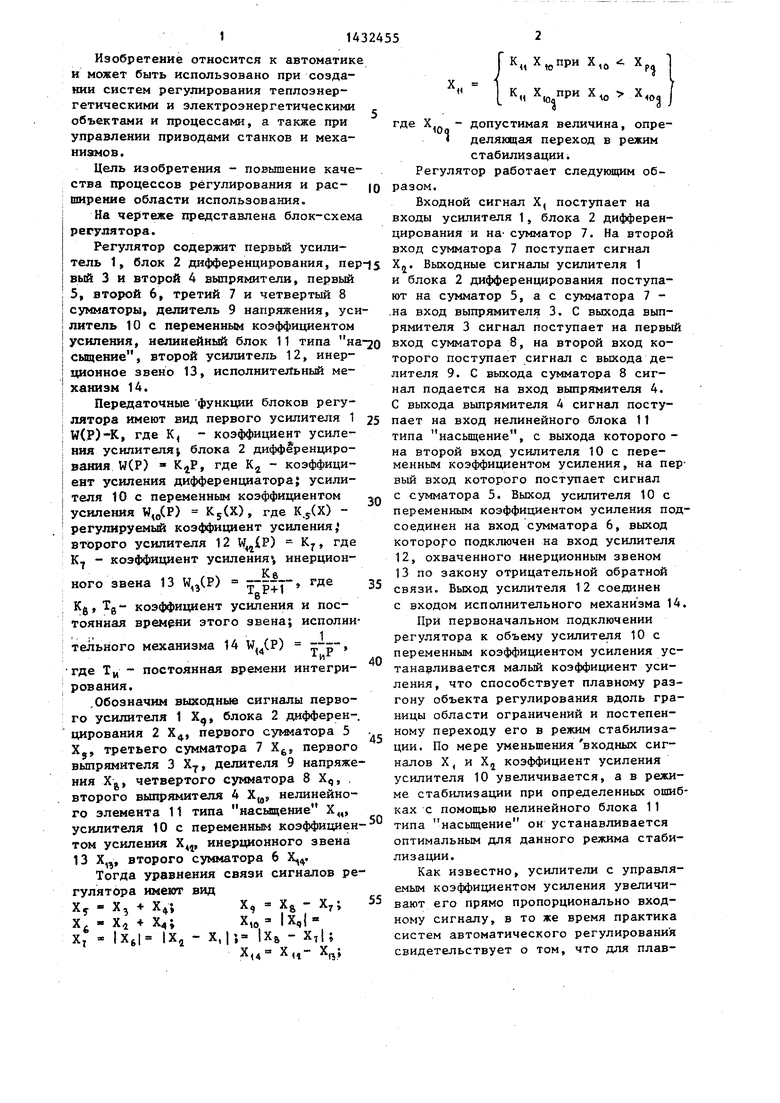
| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегрально-дифференциальный регулятор для объектов с запаздыванием | 1988 |
|
SU1596304A1 |
| Пропорционально-интегрально-дифференциалный регулятор | 1986 |
|
SU1388824A2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Следящая система | 1979 |
|
SU842711A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ СТАТИЧЕСКОЙ ОШИБКИ В АВТОМАТИЧЕСКИХ СИСТЕМАХ СТАБИЛИЗАЦИИ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2505847C1 |
| Адаптивный регулятор | 1984 |
|
SU1228073A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
Изобретение относится к автоматике и может быть использовано при создании систем регулирования теплоэнергетических и электроэнергетических объектов и процессов, а также при управлении приводами станков и механизмов. Цель изобретения - повышение качества процессов регулирования и расширение области использования. Регулятор содержит первый усилитель 1, блок 2 дифференцирования, первый выпрямитель 3, второй выпрямитель 4, первьй 5, второй 6, третий 7 и четвертый 8 сумматоры, делитель 9 напряжения, усилитель 10 с переменным коэффициентом усиления, нелинейный блок 11 типа насьпцение, второй усилитель ,12, инерционное звено 13, исполнительный механизм 14. Поставленная цель достигается за счет введения в структуру регулятора канала функционального преобразования двух координат в составе двух сумматоров 7 и 8, двух выпрямителей 3 и 4, делителя 9 напряжения, нелинейного блока 11 типа насыщение и усилителя 10 с переменным коэффициентом усиления. В результате достигается возможность изменять коэффициент усиления регулятора в завис1-смости от режима. 1 ил. t i /)
| Ротач В.Я | |||
| Расчет динамики про- мьшшенных автоматических систем регулирования | |||
| - М.: Энергия, 1973, с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Штейнберг Ш.Е | |||
| и- др | |||
| Промьшшенные автоматические регуляторы | |||
| - М.: Энергия, 1973, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
