етственно через элемент НЕ и непоседственно.
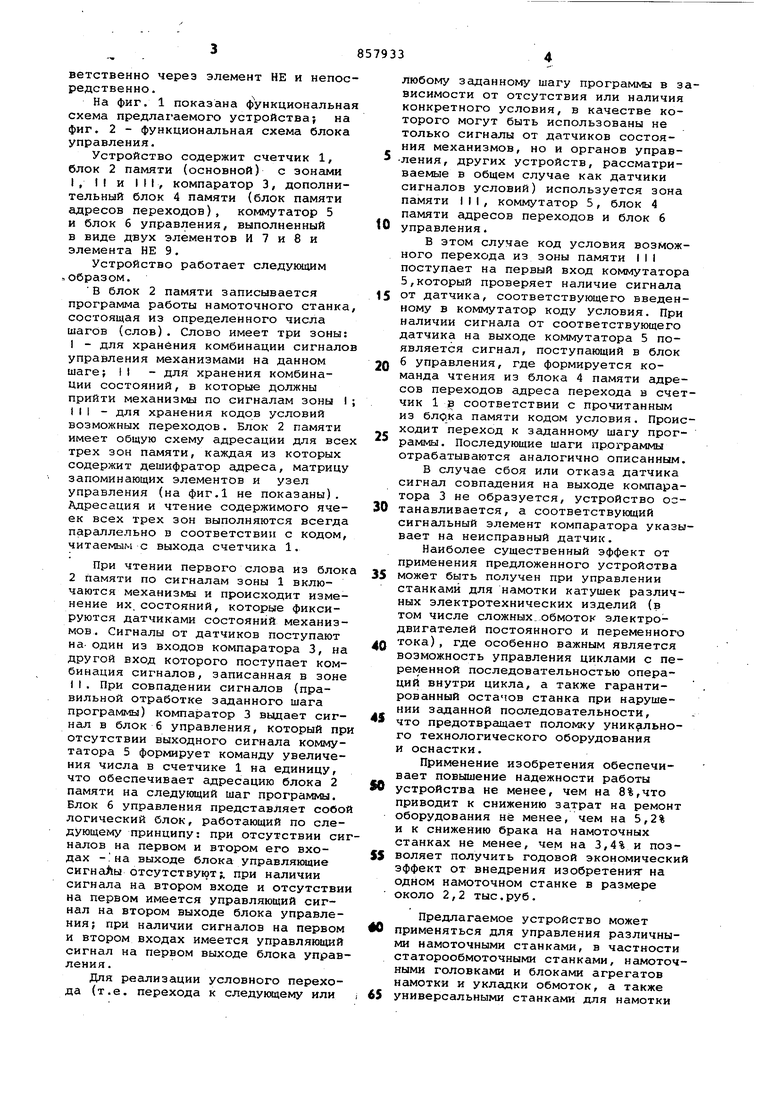
На фиг. 1 показана фVнкциoнaльнaя хема предлагаемого устройства; на иг. 2 - функционсшьная схема блока правления.
Устройство содержит счетчик 1, лок 2 памяти (основной) с зонами I, II и III, компаратор 3, дополниельный блок 4 памяти (блок памяти дресов переходов), коммутатор 5 блок б управления, выполненный в виде двух элементов И 7 и 8 и элемента НЕ 9.
Устройство работает следующим образом.
В блок 2 памяти записывается программа работы намоточного станка, состоящая из определенного числа шагОв (слов). Слово имеет три зоны:
1- для хранения комбинации сигналов управления механизмами на данном шаге; tI - для хранения комбинации состояний, в которые должны прийти механизмы по сигналам зоны I; III - для хранения кодов условий возможных переходов. Блок 2 памяти имеет общую схему адресации для всех трех зон памяти, каждая из которых содержит дешифратор адреса, матрицу запоминающих элементов и узел управления (на фиг.1 не показаны). Адресация и чтение содержимого ячеек всех трех зон выполняются всегда параллельно в соответствии с кодом, читаемым с выхода счетчика 1.
При чтении первого слова из блока
2памяти по сигналам зоны 1 включаются механизмы и происходит изменение их.состояний, которые фиксируются датчиками состояний механизмов. Сигналы от датчиков поступают на- один из входов компаратора 3, на другой вход которого поступает комбинация сигналов, записанная в зоне II. При совпадении сигналов (правильной отработке заданного шага программы) компаратор 3 выдает сигнал в блок 6 управления, который при отсутствии выходного сигнала коммутатора 5 формирует команду увеличения числа в счетчике 1 на единицу, что обеспечивает адресацию блока 2 памяти на следукяций шаг программы. Блок 6 управления представляет собой логический блок, работающий по следующему принципу: при отсутствии сигналов на первом и втором его входах -,на выходе блока управляющие сигналы отсутствуют;, при наличии сигнала на втором входе и отсутствии на первом имеется управляющий сигнал на втором выходе блока управления; при наличии сигналов на первом
и втором входах имеется управляющий сигнал на первом выходе блока управления.
Для реализации условного перехода (т.е. перехода к следующему или
любому заданному шагу программы в зависимости от отсутствия или наличия конкретного условия, в качестве которого могут быть использованы не только сигналы от датчиков состояния механизмов, но и органов управления, других устройств, рассматриваемые в общем случае как датчики сигналов условий) используется зона памяти III, коммутатор 5, блок 4 памяти адресов переходов и блок 6 управления.
В этом случае код условия возможного перехода из зоны памяти III поступает на первый вход коммутатора 5,который проверяет наличие сигнала от датчика, соответствующего введенному в коммутатор коду условия. При наличии сигнала от соответствующего датчика на выходе коммутатора 5 появляется сигнал, поступающий в блок б управления, где формируется команда чтения из блока 4 памяти адресов переходов адреса перехода в счетчик 1 ja соответствии с прочитанным из блока памяти кодом условия. Происходит переход к заданному шагу программы. Последующие шаги программы отрабатываются аналогично описанным.
В случае сбоя или отказа датчика сигнал совпадения на выходе компаратора 3 не образуется, устройство останавливается, а соответствующий сигнальный элемент компаратора указывает на неисправный датчик.
Наиболее существенный эффект от применения предложенного устройства может бьлть получен при управлении станками для намотки катушек различных электротехнических изделий (в том числе сложных, обмоток электродвигателей постоянного и переменного тока), где особенно важным является возможность управления циклами с переменной последовательностью операций внутри цикла, а также гарантированный остачов станка при нарушении заданной последовательности, что предотвращает поломку уник51льного технологического оборудования и оснастки.
Применение изобретения обеспечивает повышение надежности работы устройства не менее, чем на 8%,что приводит к снижению затрат на ремонт оборудования не менее, чем на 5,2% и к снижению брака на намоточных станках не менее, чем на 3,4% и позволяет получить годовой экономически эффект от внедрения изобретени-я на одном намоточном станке в размере около 2,2 тыс.руб.
Предлагаемое устройство может применяться для управления различными намоточными станками, в частности статорообмоточными станками, намоточными головками и блоками агрегатов намотки и укладки обмоток, а также универсальными станками для намотки
|раэличных электротехнических изделий, что позволяет получить в отрасли общий годовой экономический эффект в размере около 320 тыс.рублей.
Формула изобретения
Устройство для программного управления намоточными станками, содержащее включенные последовательно счетчик и блок памяти, первый выход которого соединен с выходом устройства, а второй - с одним входом компаратора, подключенного другим входом к первому входу устройства, о тличающееся тем, что, с целью повышения надежности устройства, оно содержит коммутатор, дополнительный блок памяти, элемент НЕ и элементы И, выход первого из которых подключен к первому входу счетчика
непосредственно, а выход второго к второму входу счетчика через дополнительный блок памяти, соединенный другим входом с третьим выходом основного блока памяти и одним входом коммутатора, другой вход которого подключен к второму входу устройства, причем первые входы обоих элементов И соединены с выходом компаратора, а вторые входы первого и второго элементов И подключены к
0 выходу коммутатора соответственно через элемент НЕ и непосредственно.
Источники информации, принятые во внимание при экспертизе
1.Унифицированная логическая
5 система управления промышленными механизмами УПМ-2. - Техническое описание. Кировоград, 1977.
2.Патент Великобритании
№ 1459177, кл. G 3 Н, опублик. 1976 (прототип).
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления намоточным оборудованием | 1984 |
|
SU1273879A2 |
| Устройство для программного управления намоточным оборудованием | 1983 |
|
SU1160366A1 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| Устройство для программного управления намоточным станком | 1985 |
|
SU1259216A1 |
| Устройство для программного управления технологическим оборудованием | 1987 |
|
SU1423982A1 |
| Устройство для программного управления намоточным станком | 1980 |
|
SU935878A1 |
| Устройство для программного управления намоточным станком | 1987 |
|
SU1451648A1 |
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Устройство для управления намоточным станком | 1979 |
|
SU807398A1 |
| Устройство для программного управления намоточным станком | 1985 |
|
SU1251029A1 |
К механизмам От iamwKod
Фие К счетчику / Ибмкутмята От коммутатора 5 Фиг. 2 От коммутатора 3
