(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости движения автомобилей | 1978 |
|
SU767810A2 |
| Устройство для определения типа транспортных средств | 1979 |
|
SU858064A1 |
| Устройство для учета транспортных средств | 1980 |
|
SU902049A2 |
| Устройство для учета транспортных средств | 1976 |
|
SU572831A1 |
| Устройство для измерения скорости движения автомобиля | 1977 |
|
SU632958A1 |
| Устройство для контроля остановки транспортного средства | 1988 |
|
SU1541654A1 |
| Устройство для фиксации превышенияРАзРЕшЕННОй СКОРОСТи дВижЕНия | 1979 |
|
SU849275A1 |
| УСТРОЙСТВО ТАЙМИРОВАНИЯ СПЕКТРОМЕТРИЧЕСКИХ ИМПУЛЬСОВ | 1995 |
|
RU2098842C1 |
| Устройство для определения занятости дорог | 1980 |
|
SU886035A1 |
| Устройство для определения скорости движения транспортных средств | 1980 |
|
SU980117A2 |
Изобретение относится к области приборостроения и может быть использовано для контроля параметров транспортных потоков с целью учета или управления движением.5
Известно устройство, содержащее последовательно соединенные индуктивный петлевой датчик, генератор, частотно-зависимую схему, соединенную с дифференцирующим блоком и tO акшлитудньад детектором, выход которых соединен с блоком памяти, соединенным своим выходом с решающим блоком, выход которого подключен к вычислительному устройству l . 15
Недостатками указанного устройства являются появление больших погрешностей измерения при определении скорости транспортных средств разньис классов, а также дополнительное лож- 20 ное срабатывание устройства при переезде над индуктивной петлей составных транспортных средств (например, грузовой автомобиль с прицепом).
Цель изобретения - повышение точ- 25 ности измерения скорости транспортных средств.
Поставленная цель достигается за счет того, что известное устрой- ( ство дополнительно снабжено амплитуд-30
ным дискриминатором и управляемым блоком задержки, при этом амплитудный дискриминатор своим входом соединен с выходом частотно-зависимой схемы, а выходом - со вторым входом решающего блока, управляемый блок задержки своим входом соединен с выходом блока памяти, а выходом с третьим входом решающего блока.
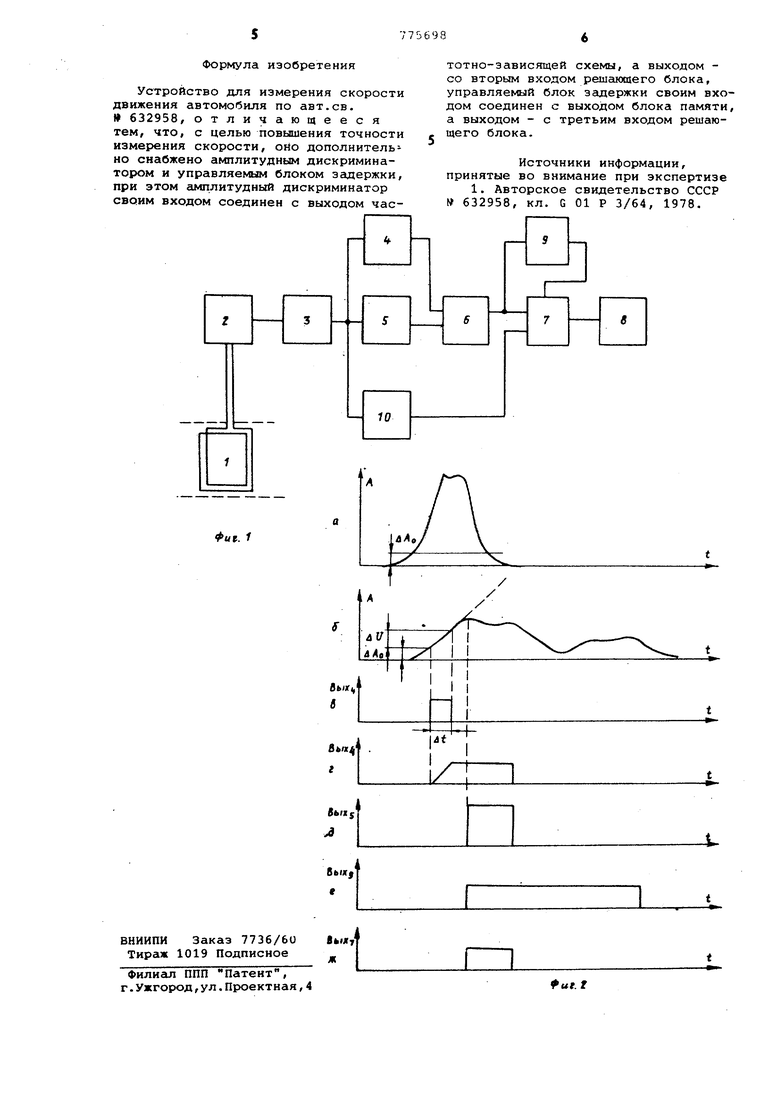
На фиг. 1 приведена структурная схема устройства; на фиг. 2, а-ж диаграмма работы устройства.
Устройство содержит индуктивный Петлевой датчик 1, генератор 2, частотно-зависимую схему 3, блок 4 дифференцирования, амплитудный детектор 5, блок 6 памяти, решающий блок 7, блок 8 регистрации, управляемый блок 9 задержки и гилплитудный дискриминатор 10.
Выход генератора 2 на вход которого подключен индуктивный петлевой датчик 1, соединен со входом частотно-зависимой cxeNU 3, выход которой соединен с блоком 4 дифференцирования, амплитудным детектором 5 и амплитудным дискриминатором 10. Выходы блока 4 дифференцирования и амплитудного детектора 5 подключены к блоку 6 памяти. Выходы блока 6
п&мятн и амплитудного дискриминатора 10 связаны с первым и вторым входами решающего блока 7. Выход блока 6 пгичяти соединен также со входом управляемого блока 9 задержки, выход которого соединен с третьим входом решсшщего блока 7, выход ре шакжцего блока 7 - со входом блока 8 регистрации.
Работает устройство следукадим образом.
При проезде транспортного срещства над индуктивной петлей, изменяется индуктивность петли, тем самым изменяется частота первичного генератора 2« Частотно-зависи лая схема 3 изменения частоты первичного генератора 2 преобразуется в аналоговьай импульс (фиг. 2-а), форма которого зависит от размеров и типа транспортных средств, поперечного пересечения петли, а также от расстояния между массой и петлей и от скорости транспортных средств (фиг, 2 .б).
Информативным параметром относительной скорости при переезде над индуктивной петлей одного и того же транспортного средства является максимеитьное значение скорости нарастания переднего фронта ангшогового импульса с учетом максимального значения аналогового импульса. При этом скорость определяется по формуле
К| /
1
где 5fj - максимальное значение производной;
Л - амплитуда аналогового импульса;
К - коэффициент учитывающий размерность 5дА и А,,. Дпя получения S и Ад аналоговый импульс с выхода частотно-зависимой схемы 3 поступает на вход блока 4 дифференцирования и на вход амплитудного детектора 5,
Значения 5цл (Фиг. 2,в,г) и А (фиг. 2.д), полученные на выходе блка дифференцирования и амплитудного детектора/ запоминаются в блоке 6 памяти. При этом с целью упрощения функции дифференцирования аналогового сигнала блок 4 дифференцирования выполнен таким образом, что с определенного уровня дАо аналогового сигнала фиксируется прирастание ДА в определенный промежуток времени &t--coh5t,T .е. определяетсяйи|д сопз1 д напряжение AU пропорционально uA .
Реализа ция в решаквдем блоке 7 функции К1 Ц- сои5 позволяет определить скорость одного класса транспортных средств независимо от поперечного пересечения индуктивной петли.
Для учета класса транспортного средства, переезжакяцего датчик 1, введен амплитудный дискриминатор 10
По амплитудному значению аналогового импульса амплитудный дискриминатор 6 подразделяет транспортное средство к одному из двух подмножеств :
, А,7А„, F--|Q,|A,..
где Е подмножество легковых автомашин и автобусов;
F подмножество грузовых и грузовых с. прицепом или полуприцепом;
а.транспортное средство, переезжающее индуктивную петлю/
- амплитудное значение аналогового импульса,
А)- пороговое значение амплитуды.
В зависимости от подмножества, к которому относится транспортное средство, в решаквдем блоке 7 при вычислении делается соответствующая поправка.
В свою очередь, для исключения ложного срабатывания устройства при переезде над индуктивной петлей транспортного средства с прицепом (фиг. 2,б) введен управляемый блок .9 Зсщержки, который в соответствии с приближенной скоростью транспортного средства после разрешающего сигнала амплитудного детектора 5 вырабатывает запрещакиций сигнал решающему блоку 7 на промежуток времениf зависящего от скорости и соответствующей максимальной длины прицепа (фиг. 2 -а) .
Если деление в решающем блоке 7 происходит двух частот пропорциональных uU и А , причем .- д и выбирается соответствующий коэффициент К на выходе решающего блока 7 получаются импульсы, количественное значение которых пропорционально скорости транспортных средств (фиг. 2 ж). В блоке 8 регистрации происходит соответствующая регистрация. После определенного прмежутка времени, необходимого для срабатывания регистрирукидих устройс в блоке 8 регистрации вырабатываются значения AU и А( в соответствующих блоках, и устройство подготоленное для дальнейшей работы.
Введение в схему аплитудного дискриминатора 10 и управляемого блка 9 задержки позволяет определить скорость с увеличенной точностью независимо от класса транспортного средства,а также исключить ложное срабатывание устройства при переезд над индуктивной петлей транспортных средств различных классов.
