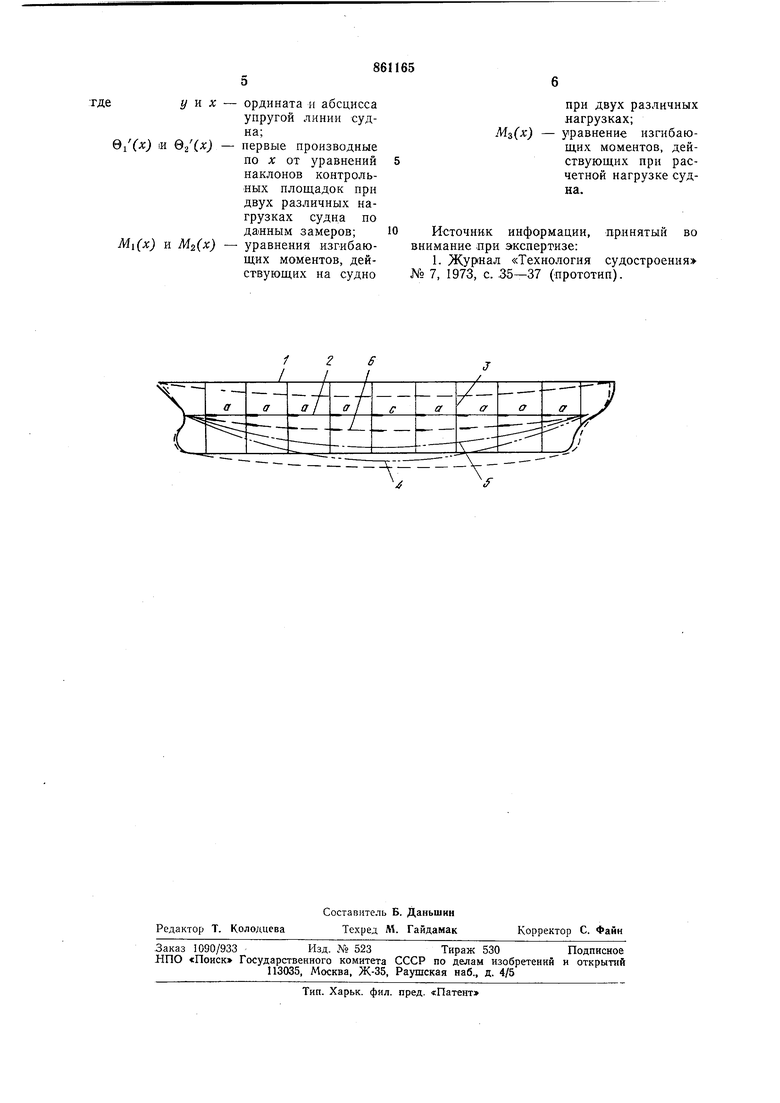
На чертеже схематически изображено устройство для осуществления предлагаемого способа.
На судне 7 в стапельный период его постройки, когда упругая линия судна имеет вид прямой 2, на поперечных переборках 3 устанавливают контрольные площадки а, параллельные центральной контрольной площадке с. После спуска судна на воду и заверщения сварочных работ по формированию корпуса (установке надстроек, мачт и т. п.) измеряют при одной нагрузке судна наклоны контрольных площадок а относительно центральной контрольной площадки с, соответствующие упругой линии 4. На основании полученных замеров, строят уравнение углов поворота сечений экзивалентного бруса корпуса судна при этой нагрузке, используя метод наименьших
Q() ) - .А)м,{х} ,, , ,, /И.,(А-)-уИ,и) I () о о у и X - ордината И абсцисса 2р упругой линии судна;QI(X) и &./{х) - первые производные по X от уравнений наклонов контроль- 25 ных площадок при двух различных нагрузках судна по данным за.мерое; М,(х) и М2(х) - уравнения изг))- 30 щих моментов, действующих на судно при двух различных нагрузках; MZ(X) - уравнение .изгибаю- 35 щнх моментов, действующих .при расчетной нагрузке судна.. Урав.нение углов поворота сечений ясг р пользуют пр-я Выдаче углов упреждения для обработки фундаментов. Использование предлагаемого способа позволяет исключить балластировку судцга и уменьшить объем расчетов.45 Точность определения упругой л-иии-и судна зависит от точности замеров накло-на контрольных площадок и определения изгибающих моментов. Относительная погрешиость замеров не превыщает 5-10%, 50 такого же порядка может быть обеспечена относительная погрещность определения изМ.,(х) -jMjixJ f. ,,. М,(х)--М,(х)
квадратов. Одновременно на электронновычислительной мащине по известному алгоритму вычисляют изгибающие моменты, действующие на судно при этой нагрузке.
Затем изменяют загрузку судна, например, на 15%. Измеряют наклоны контрольных площадок а относительно центральной контрольной площадки с, соответствующие упругой линии 5.
На основании замеров строят уравнение углов поворота сечений эквивалентного бруса корпуса судна при другой нагрузке. Одновременно вычисляют изгибающие моменты, действующие на судно при другой
;нагрузке и при заданной нагрузке.
Затем определяют уравнение углов поворота сечений эквивалентного бруса, а затем уравнение упругой линии 6 судна при заданной нагрузке:
Шх) М.,(х}
dxW,(,(x) l(..e4v-)l.dv-dv ,(х)М,(х} гибающих моментов. Таким образом, относительная погрещность предлагаемого способа может быть доведена до 10-20%. Ловыщение точности определения упругой линии судна при заданной нагрузке обеснеч1Ит уменьшение вероятности брака IJPH обработке фундаментов и яовышение ifaaecTBa увязки координатных систем оборудова.ния. Формула изобретения : Способ определения упругой линии корпуса судна 1на плаву при заданной нагрузке с применением контрольных площадок н базовой центральной площадки в районе м-иделя :судна, установленных на его попереч-г ных переборках в стапельный (период форт мироваиия корпуса, и угло.мернг х приборов, отличающийся тем, что, с целью п.о,вь1щения точности определения, расположения упругой ЛИ1НИИ и уменьшения трудоемкости проведения этой операции, кон-трольные площадки устанавливают параллельно центральной площадке, а после спус Ка.корпуса судна на воду и окончательного его. формирования корпус поочередно нагружают двумя различными по величине наг.рузкам1И, при этом -производят замеры наклона контрольных площадок относительно центральной и вычисляют упругую линию с;уд|ца при расчетной ;иагрузке тю формуле: ;,().-УИ,,(л-) г.,,. ,. ,у
у и X - ордината и абсцисса
де упругой линии судна;
Q,(x) ;и Q,(x) первые производные по X от уравнений наклонов контрольных площадок прн двух различных нагрузках судна по данным замеров;
MI(X) и М2(Х) уравнения изгибающих моментов, действующих на судно
при двух различных нагрузках;
зфавнение изгибающих моментов, действующих при расчетной нагрузке судна.
10 Источник информации, принятый во вниманне при экспертизе:
1. Журнал «Технология судостроения № 7, 1973, с. .35-37 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля изменения упругой линии судна на плаву | 1988 |
|
SU1625762A1 |
| Устройство для измерения изменений упругой линии судна на плаву и способ его использования | 1980 |
|
SU972211A1 |
| Способ контроля изменений упругой линии судна на плаву | 1983 |
|
SU1090610A1 |
| Леса для стапельной сборки корпуса судна | 1987 |
|
SU1472345A2 |
| Оптический способ проверки положенияКОРпуСНыХ КОНСТРуКций и ОбВОдОВ СудНАНА СТАпЕлЕ | 1979 |
|
SU844460A1 |
| Способ определения и согласованияпОлОжЕНия ОбОРудОВАНия ОТНОСиТЕльНОбАзОВОй диАМЕТРАльНОй плОСКОСТиСудНА HA плАВу | 1979 |
|
SU832334A1 |
| Леса для стапельной сборки корпуса судна из секций | 1986 |
|
SU1384473A1 |
| Леса для стапельной сборки корпуса судна | 1985 |
|
SU1289750A1 |
| Устройство для погрузки, выгрузки и крепления лихтеров в грузовом трюме лихтеровоза | 1977 |
|
SU725945A1 |
| Способ контуровки секций и блоков корпуса судна | 1972 |
|
SU482344A1 |
