(54) УСТРОЙСТВО ДЛЯ ПОГРУЗКИ, ВЫГРУЗКИ и КРЕПЛЕНИЯ ЛИХТЕРОВ В ГРУЗОВОМ ТРЮМЕ ЛИХТЕРОВОЗА
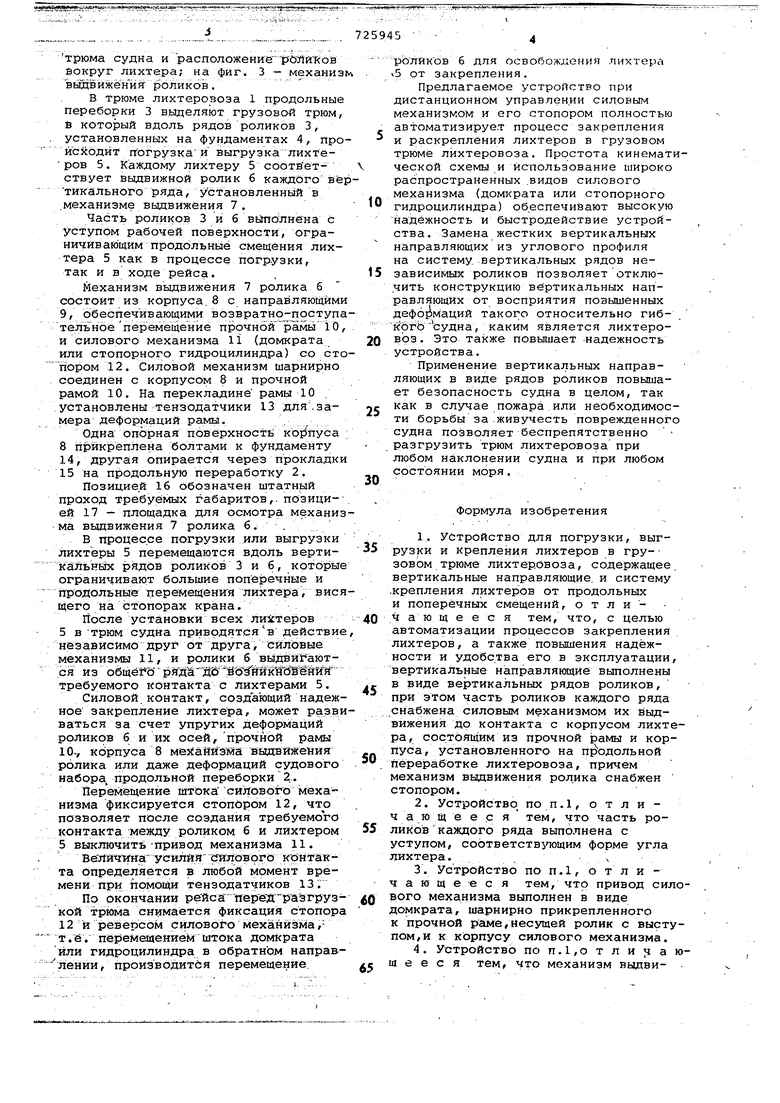
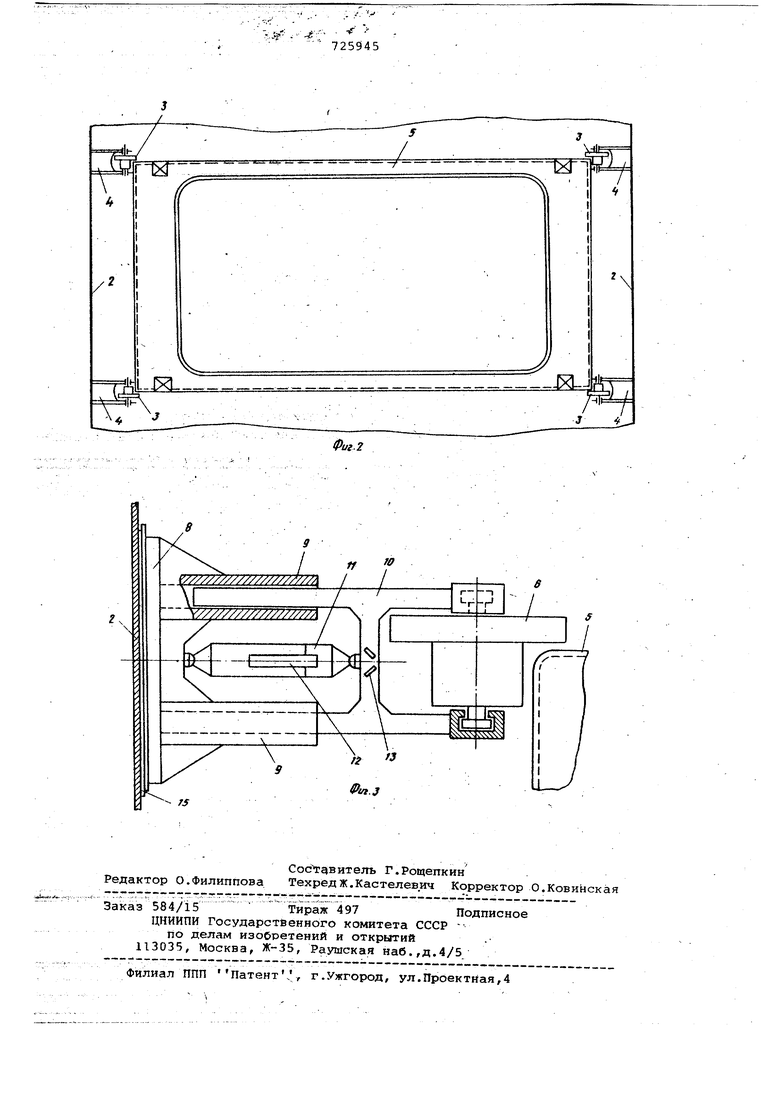
трюма судна и расположение™ рЬ«йт :ов вокруг лихтера; на фиг. 3 - механизм вьЩвйжёнйя роликов.
В трюме лихтеровоэа 1 продольные переборки 3 выделяют грузовой трюм, в который вдоль рядов роликов 3, установленных на фундаментах 4, пройсхбдйт ntirpysKa и выгрузка лихтё ров 5. Каждому лихтеру 5 соответствует выдвижной ролик 6 каждого вёртика1Льного ряда, установленный в .механизме выдвижёнигя 7.
Часть роликов 3 и 6 вьЛполнё на с уступом рабочей поверхности, ограничивающим продольные смещения лихтера 5 как в процессе погрузки, так и в ходе рейса.
Механизм выдвижения 7 ролика б состоит из корпуса.8 с направляющими 9, (Эбеспечйвающими возвратнр-поступателъ ноеперемещение прочной рамы Ю, . и силового механизма li (домкрата или стопорного гидроцилиндра) со стопором 12. Силовой механизм шарнирно соединен с корпусом 8 и прочной рамой 10. На перекладине рамы 10 . установлены тензодатчики 13 для.замера деформаций рамы. . .....
Одна опорная пбверхность KOjinyca 8 прикреплена болтами к фундаменту 14, другая опирается через прокладки 15 на продольную переработку 2.
Позицией 16 обозначен штатный проход требуемых габаритов,, позицией 17 - площадка для осмотра механизма вьшвижения 7 ролика б. .
В процес.се погрузки или выгрузки Лихтеры 5 перемещаются вдоль вертикальных рядов роликов 3 и б, которые ограничивают большие поперечные и продольные перемещения лихтера, висящего на стопорах крана.
После установки всех лихтеров 5 втрюм судна приводятсяв действие, независимо друг от друга, Силовые механизмы 11, и ролики б выдвигаются из общёгЭ ряда-:аб ЙШЙйШШ1ййГГ требуемого контакта с лихтерами 5.
Силовой контакт, создающий надежное закрепление лихтера, может развиваться за счет упругих деформаций роликов б и их осей,прочной рамы 10., кбрпуса 8 мез аНйЗйй выдвижения ролика или даже деформаций судового набора, продольной переборки 2,.
Пер1еМёщение штОка сияово17О механизма фиксируется стопором 12, что позволяет после создания требуемого контакта между роликом б и лихтером 5 выключить-привод механизма 11.
Ъёп-йщаа ifixnia-Boro к-оат &кта определяется в любой момент времени при помощи тензодатчиков 13.
По окончании рейса- ПёреЯраэгрузкой трюма снимается фиксация стопора 12 и реверсом силового Механизма , т.ё. перемещением штока домкрата или гидроцилиндра в обратно.м направлеНии, производится перемещение.
725945
ролйков б для освобожления .пихтера i5 от закрепления.
Предлагаемое устройство при дистанционном управлении силовым механизмом и его стопором полностью автоматизируе.т процесс закрепления и раскрепления лихтеров в грузовом трюме лихтеровоза. Простота кинематческой схемы и использование широко распространенных .видов силового механизма (домкрата или стопорного гидроцилиндра) обеспечивают высокую надёжность и быстродействие устройства. Замена жестких вертикальных направляющих из углового профиля на систему, вертикальных рядов независимых роликов Позволяет отклю.чить конструкцию вертикальных направляющих от восприятия повышенных деформаций такого относительно гибкбгЬЪудна, каким является лихтероВ1ЭЗ. Это также повышает надежность устройства.
Применение вертикальных направляющих в виде рядов роликов повышает безопасность судна в целом, так как в случае пожара или необходимости борьбы за .живучесть поврежденног судна позволяет беспрепятственно разгрузить трюм лихтеровоза при любом наклонении судна и при любом состоянии моря.
Формула изобретения
1.Устройство для погрузки, выгрузки и крепления лихтеров в гру- зовом трюме лихтеровоза, содержащее вертикальные направляющие, и систему .крепления лихтеров от продольных
и поперечных смещений, о т л и - ч а ю щ е е с я тем, что, с целью автоматизации процессов закрепления лихтеров, а также повышения надёжности и удобства его в эксплуатации вертикальные направляющие выполнены в виде вертикальных рядов роликов, при этом часть роликов каждого ряда снабжена силовым механизмом их выдвижения до контакта с корпусом лихтра, сос.тоящим из прочной рамы и корпуса, установленного на п одольной переработке лихтеровоза, причем механизм выдвижения ролика снабжен стопором.
2.Устройство по П.1, о т л и ч а ю щ е е .с я тем, что часть роликовкаждого ряда выполнена с уступом, соответств тощим форме угла лихтера.ч
3.Устройство по П.1, о тли ч а ю щ е е с я тем, что привод силвого механизма выполнен в виде домкрата, шарнирно прикрепленного к прочной раме,Несущей ролик с выстпом, и к корпусу силового механизма.
4 . Устройство поп.1,отли1аш е е с я тем, что механизм выдвижения роликов снабжен тензодатчиками для замера величины усилия контакта роликов с корпусом лихтера.
Источники информации, принятые во внимание при экспертизе
1.Патент США 3469716,кл.214-15, опублик. 1969.
2.Патент США № 3722449,кл.114-75, опублик. 1973 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоблокировки лихтеров на лихтеровозе | 1979 |
|
SU789312A1 |
| Устройство для погрузки и выгрузки лихтеров на лихтеровозах | 1980 |
|
SU954324A1 |
| Грузовое устройство лихтеровоза | 1983 |
|
SU1152877A1 |
| Лихтер | 1985 |
|
SU1255509A1 |
| Устройство для закрепления лихтеров в грузовом трюме лихтеровоза | 1978 |
|
SU676492A1 |
| Устройство для погрузки на судно и выгрузки группы контейнеров | 1979 |
|
SU887351A1 |
| Устройство для швартовки лихтеров к кормовой оконечности лихтеровоза | 1980 |
|
SU943088A1 |
| Устройство для крепления лихтеров в грузовом трюме лихтеровоза | 1978 |
|
SU707847A1 |
| Фидерный лихтеровоз капитана М.И.Мануйлова | 1984 |
|
SU1191355A1 |
| Судно для перевозки лихтеров | 1978 |
|
SU747770A1 |
/
