(54) УСПЧЯКГГВО ДЛЯ ПГОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1607071A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для программного управления | 1985 |
|
SU1275373A1 |
| Устройство для контроля систем программного управления станком | 1988 |
|
SU1580320A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| УСТРОЙСТВО ДЛЯ числового ПРОГРАММНОГОТ1:Х11/^1С.^;;-д^Е Ш5'БЛК-«Г^-д | 1979 |
|
SU826279A1 |
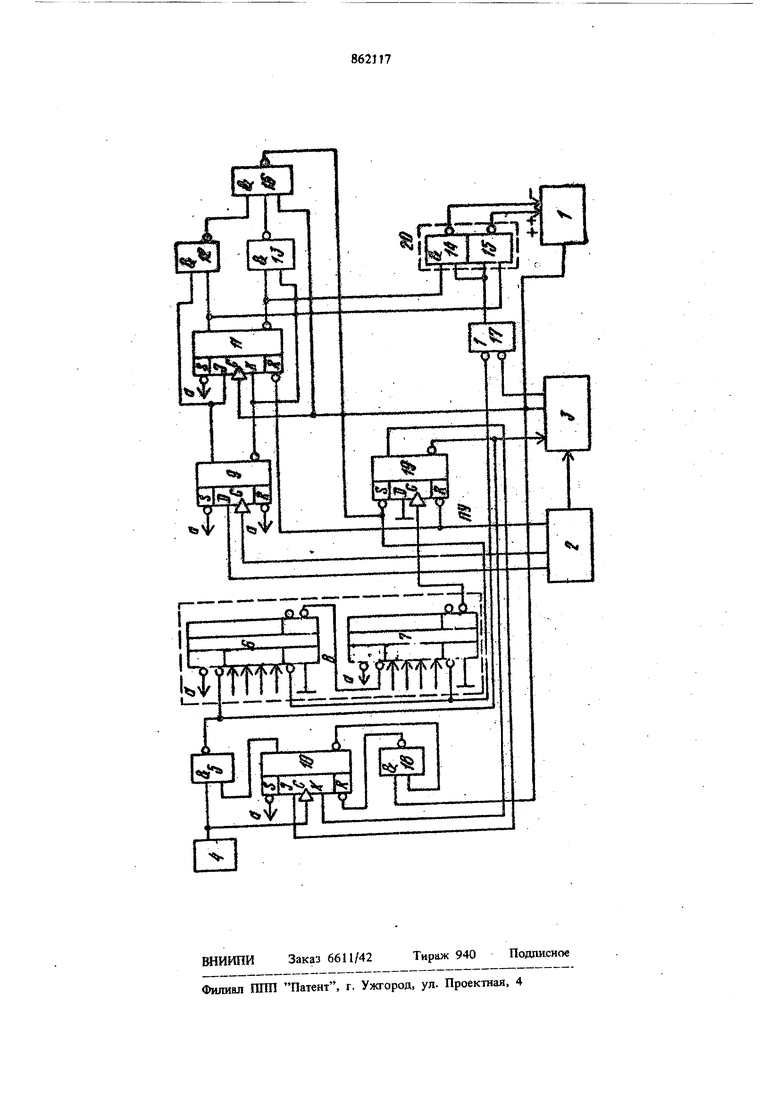
Изобтетение относится к области автоматик и вычислительной техники и может быть испол зовано в системах числового программного управления металлорежущими станками. Итаестно устройство оля программного управления, состоящее из последовательно соединенных фотосчитываюшего устройства, блока ввода информащо, управления работой, а также блоков жщающего генератора со схеМ(А авто«Фатического разгона к торможения, блока времени отработки кадра, блок счет тка-рашредалителя импульсов, блоков коордашат во схемами контроля выходной информации, выходы которых подключены к вхо дам блоков управле1шя приводами, выход блока генератора присоединен к входу блока задания отработки кадра, а его выход - к входу блока счетчика-распределителя I. Недостатком устройства является низкая точ ность обработки деталей при наличии люфтов в кинематических цепях станка несмотря на ис пользование канала компенсации скоростной ошибки. Известно также устройство для программного управжния, содержащее блок управления и последовательно соеданенные блок задания программы, делитель частоты, фазовый диСгкриминатор и привод с кинематическим люфтом, подключенный к первому и второму датчикам перемещений (2, недостатками которого являются низкие точность и быстродействие из-за влияния люфта при отсутствии программы, так как устройство при этом замкнуто на второй датчик перемещений, высокая сложность я стоимость устршства, что объясняется наличием двух датчиков перемещений 21. Наиболее близким техническим решением к изобретению является устройство для программного управления, содержащее блок управле1шя и последовательно соединенные блок задания программы, делитель частоты, фазовый дискриминатор и привод с кинематически люфтом, подключенный к первому и второму датчикам перемещений, а также коммутатор, первый вход которого подключен к выходу блока управления, а выход - к другому входу делителя частоты, элемент И-ИЛИ, первые 3 входы которого подключены к датчикам пере мещений, а выход к входу блока управлени и другому входу фазового дискриминатора, и фо /мирователь импульсов, вход которого соединен с выходом блока задания программы, выходы формирователя импульсов подключи ы к соответствующим входам коммутатора, блока управления и элемента И-ИЛИ З. Недостатком этого устройства является сло ность из-за наличия двух датчиков перемешеHHjf и -аналоговых коммутаторов. Целью изобретения является повышение точности работы устройства. Поставленная цель достигается тем, что в . устройство для программного управления, содержащее генератор импульсов, счетчик, приво подключе1шый входами к выходам блока выбора знака, и последовательно соединенные блок ввода программы, блок управления и элемент ИЛИ, введены пять элементов И-НЕ, два D-триггера и два 3 К-триггера. Прямой выход первого D-триггера соединен с ГЗ -вхо дом первого D К-триггера, инверсный выход с вторым входом блока управления и с К-вхо дом первого Э К-триггера, S -вход - с вы-1 ходом первого элемента И-НЕ и с входом записи счетчика, синхронизирующий вход - с выходеI переполнения счетчика, а R-вход - с вторым выходом блока ввода программы и С R-входом 1 второго 3 К-триггера, которого подключен к первому входу второго элемента И-НЕ и к инверсному выходу второго D-триггера, синхронизирующий вход - к второму выходу блока управления и к первому входу первого элемента И-НЕ, U-вход , к прямому выходу второго D-триггера и к пе вому входу третьего элемента И-НЕ, а прямо и инверсный выходы - к вторым входам соответственно третьего и второго элементов И-НЕ и к первым входам блока выбора знака, соединенного вторыми входами с выходом элемента ИЛИ. Первый вход четвертого элемента И-НЕ подсоединен к синхро1шзирующему входу первого 3 К-триггера и к выходу генератора импульсов, выход - к счетному входу счетчика и к второму входу элемента ИЛИ, а второй вход - к прямому выходу первого 3 К-триггера, R-вход и инверсный выход кото рого соединены соответственно с выходом и первым входом пятого- элемента И-НЕ, подкл ченного вторым входом к выходу привода. Выходь второго и третьего элементов И-НЕ соединены соответственно с вторым и третьим входа1йи первого элемента И-НЕ, а синхронязирующий вход и D-вход второго D-триггера подключены соответственно к третьему и четвертому выходам блока ввода программы. На чертеже представлена схема устройства. Оно содержит привод 1, блок 2 ввода программы, блок 3 управления, генератор 4 импульсов, четвертый элемент 5 И-НЕ, разряды 6 и 7 счетчика 8, второй D-триггер 9, первый 10 и второй 113 К-триггеры, третий 12 и второй 13 элементы И-НЕ, элементы 14 и 15 И-НЕ, первый элемент 16 И-НЕ, элемент 17 ИЛИ, пятый элемент 18 И-НЕ, первый О-триггер 19 и блок выбора знака 20. Буквой (Я обозначена точка единичного потенциада, к которой подключены сигнальные цепи триггеров, не задействованные согласно логике работы устройстча, что необходимо дпя обеспечения их работоспособности. Устройство работает следующим образом. Первоначально сигналом предварительной установки (ПУ) , поступающим с выхода блока 2, D-триггер 19 иЭ К-триггер 11 устанавливаются в нулевое состояние. При этом сигнал с инверсного плеча О-триггера 19 дает разрешение в блок 3 и сбрась1вает в нуль I К-триггер 10. Информация о величине перемещения и его скорости с выхода блока 2 передается в блок 3, в качестве которого может быть использован интерполятор или позиционер с блоком задания скорости. Знак перемещения записывается по входу D и синхросигналу, вырабатываемому блоком 2 в О-триггер 9. По сигналу окончания отработки предыдущего кадра, который вырабатывается блоком 3,знак перемещения переписывается в К-триггер И, выходы которого управляют элементами И-НЕ 14, 15. При нормальной работе информация перемещения в виде унитарного кода с выхода блока 3 через элемент ИЛИ 17 поступает на входы элементов И-НЕ 14, 15. Один из этих элементов всегда от--рыт, и с его выхода информация поступает на вход привода по каналу Ч ита. Так продолжается до тех пор, пока в программе не; задается смена знака, т. е. реверс привода. В этом случае независимо от направления смены знака + на - или - на Ч, D-триггер 9 и 3 К-триггер 11 находятся в противоположных состояниях, благодаря чему на одном из входов элементов И-НЕ 12 и 13 имеются нулевые сигналы и, следовательно, на их выходах присутствуют сигналы единицы. Тогда сигнал окончания отработки перемещения с выхода блока 3 поступает на вход элемента И-НЕ 16 и с его выхода на S-вход D-триггера 19, устанавливая его в единицу, и на входы записи с параллельных входов разрядов 6 и 7, счетчика 8. при этом величина люфта, запаянная на параллельных входах счетчика 8 в виде перемычек к щинам нуля и еулницы, запишется э разряды 6 и 7. rio заднему фронту сигнала окончания перемещения знак следующего пе ремещения перепишется из D-триггера 9 в . 58 t К-триггер 11, но еще по пepeднe .y фронту этого же сигнала нулевой потенциал с инверсного выхода D-триггера 19 запретит пуск отработки следующего кадра информащш в блоке Этот нулевой сигнал поступит также на К-вход Э К-триггера 10, на Э -входе которого в этот момент появляется единичный потенциал с прямого выхода D-триггера 19. Если привод 1 не закончил отработку информации предьщущего кадра, то есть наполнитель рассогласования (на чертеже не показан) не находится в нулево состоянии, сигнал на выходе дискриминатора (на чертеже не показан) не равен нулю, тогда на выходе привода I присутствует едш0 иый сигнал блокировки люфта, который через эле менты И-НЕ 18 при наличии единицы la второ входе последнего удерживает на R-входу К-триггер 10 в нулевом состоянии. Когда привод 1 закончит отработку остатка переме1це1шя, величина которого определяется динамической ошибкой, блокировка на R-входе 3 К-триггера 10 исчезнет, и по заднему фронту следующего импульса генератора 4 Э К-триггер 19 установится в состояние единицы и откроет элемент И-НЕ 5, а с инверсного выхода D К-триггера 10 сигнал заблокирует элемент И-НЕ 18. После этого импульсы с выхода генератора 4 через элемент 2 и-НЕ 5 начинают поступать на вход (например, вычитающий) счетчика 8 и одновременно через элемент ИЛИ 17 и один из элемеитов И-НЕ 14 или 15 на вход + или - привода 1 в соответствии с состоянием Л К-триггера 11. Эти импульсы поступают в привод i и обеспечивают отработку люфта. Так иродолжается до тех пор, пока на выходе переполне1шя счетчика 8 не появляется импульс, который по переднему фронту сбрасывает D-триггер 19 в нулевое состояние. Соответственно изменяетс потенциал на Г и К-входах D К-триггера 10, и он по заднему фронту синхроимпульса, одноименного с импульсом переполнения, переключится в нулевое состояние, разблокировав элемент И-НЕ 18. При этом нулевой выходной сигнал с элемента И-НЕ 18 подтвердит и будет удерживать (7 К-триггер 10 в нулевом состоянии до тех пор, пока привод не окажется в нулевом положении, и его нулевой сигнал не снимет блокировку с 3 К-триггера 10. Далее при смене знака перемещения цикл работы повторяется. Преимуществами предлагаемого устройства являются; простота, так как в нем отсутствуют второй датчик перемешения и сложные элементы канала компенсации скоростной ошибки; высо кая точность работы, так как за счет блокиро ки переключения J К-триггера 10 сигналом нулевого состояния привода .исключается возмож ность вьпштания импульсов коррекции люфта из размерного перемещения предыдущего кадра, а следовательно, и искажение размера и формы детали в кадре программы, предшествующем реверсу знака координа1ы. Формула изобретения Усгройсгво для программного управления, содержащее генератор импульсов, счетчик, привод, подключенный входами к выходам блока вы,бора знака, и последовательно соединенные блок ввода программы, блок управления и элемент ИЛИ, отличающееся тем, что, с целью повыщения точности работы устройства, в него введены пять элементов И-НЕ, два D-триггера и даа 3 К-триггера, прямой выход первого О-1-риггера соединен с 3-входом первого Ктриггера, инверсный выход - с вторым входом блока управления и с К-входом первого JKтриггера, S-вход - с выходом первого элемента И-НЕ и с входом записи счетчика, синхронизирующий вход - с выходом переполнения счетчика, 3 R-вход - с вторым выходом блока ввода программы и с R-входом второго J К-триггера, К-вход которого подключен к первстиу входу второго элемента И-НЕ и к инверсному выходу второго О-триггера, синхронизирующий вход - к второму выходу блока управления и к первому входу первого элемента И-НЕ, Л -вход - к прямому выходу второго D-триггера и к вервому входу третьего элемента И-НЕ, а прямой н KffflepcKbiA выходы - к вторым входам соответственно третьего и второго злементов И-НЕ и к первым входам блока выбора знака, соединенного вторыми входами с выходом элемента ИЛИ, первый вход четвертого элемента И-НЕ подсоединен к синхронизирующему входу . первого О К-триггера и к выходу генератора импульсов, выход - к счетному входу счетчика н к второму входу элемента ИЛИ, а второй вход - к прямому выходу первого Э К-триггера, R-вход и инверсный выход которого соединены соответственно с выходом и первым входом пятого элемента И-НЕ, подключенного вторым входом к выходу привода, причем выходы второго и третьего элементов И-НЕ соединены соответственно с вторым и третьим входами первого элемента И-НЕ, а синхронизирующий вход и D-вход второго D-триггера подключены соответственно к третьему и четвертому выходам блока ввода программы. Источники информации, принятые во внимание при экспертизе 1.Сб. Электроавтоматика станков. Контурные системы числового управления и их элементы. М., Мащиностроение, 1972, с. 20-22. 2.Авторское свидетельство СССР № 432454, кл. G 05 В 11/02, 1972. 3. Авторское свидетельство СССР № 601662, кл. G 05 В 19/04, 1975 (прототип).
