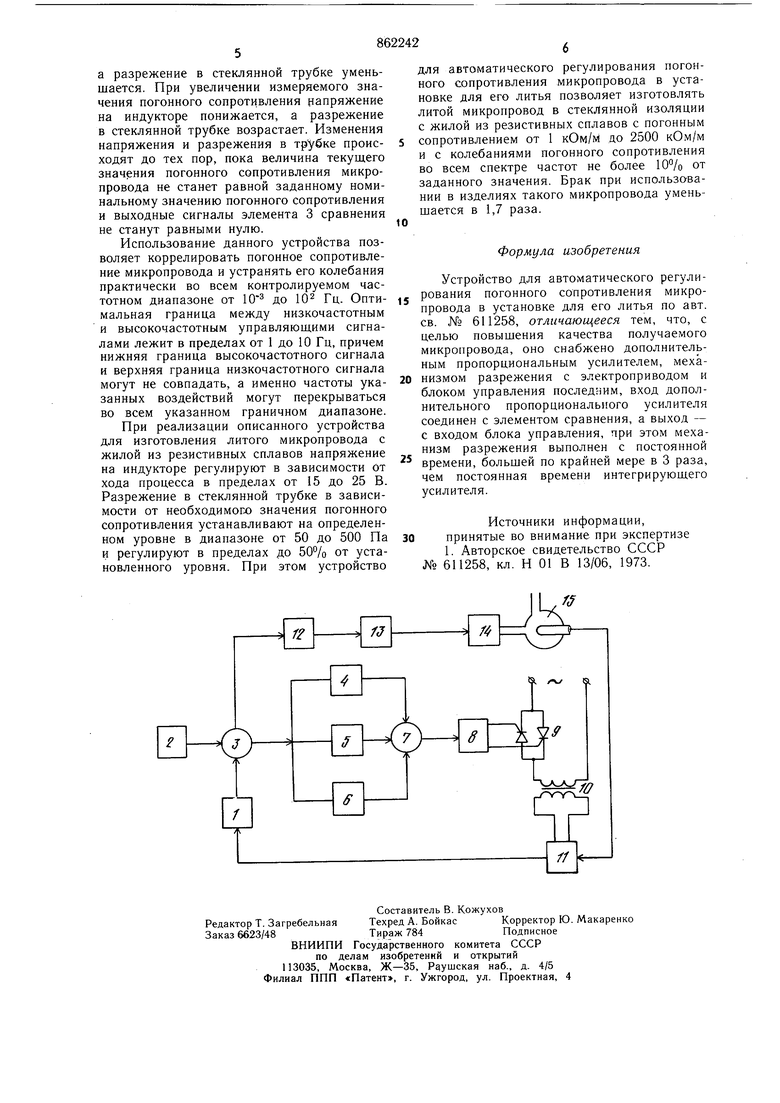
386 разрежения с электроприводом и блоком управления последнего, вход дополнительного пропорционального усилителя соединен с элементом сравнения, а выход - с входом блока управления, причем механизм разрежения выполнен с постоянной времени, большей по крайней мере в 3 раза, чем постоянная времени интегрирующего усилителя. На чертеже изображено предложенное устройство. Устройство содержит датчик (измеритель) 1 текущего и задатчик 2 номинального значений погонного сопротивления микропровода, соединенные с элементом 3 сравнения. Выход элемента 3 сравнения подключен к входам первого пропорционального 4, дифференциального 5 и интегрирующего 6 усилителей, выходы которых подключены к входам сумматора 7, соединенного с блоком 8 формирования управляющих импульсов. Выходы блока 8 формирования управляющих импульсов соответственно подключены к управляющим электродам тиристоров 9, включенных встречно-параллельно в цепь первичной обмотки трансформатора 10 накала лампы автогенератора для плавки металла установки 11 для литья микропровода. Вход датчика 1 текущего значения погонного сопротивления микропровода соединен с установкой 11 для литья микропровода. Вход дополнительного пропорционального усилителя 12 соединен с элементом 3 сравнения, а его выход - с входом блока 13 управления электроприводом 14 механизма 15 разрежения. Предпочтительным является использование механизма разрежения ротационного типа, в частности в виде электродвигателя с насаженной на ось центробежной крыльчаткой, размещенной внутри цилиндрического корпуса, всасывающее отверстие которого соединено гибким щлангом с верхним открытым концом стеклянной трубки в установке 11 для литья микропровода. Механизм 15 разрежения выполнен с постоянной времени, по крайней мере в 3 раза больщей, чем постоянная времени интегрирующего усилителя 6, и составляет в реализованном устройстве величину порядка 3 - 5с, в то время как постоянная времени интегрирующего усилителя 6 (которая определяет инерционность регулирования напряжения на индукторе) составляет 0,1 - 1 с. Устройство работает следующим образом. С датчика 1 сигнал, пропорциональный измеряемому текущему значению погонного сопротивления микропровода, получаемого на установке 11, поступает на элемент 3 сравнения, где сравнивается с опорным сигналом, поступающим от задатчика 2 номинального значения погонного сопротивления микропровода. При отклонении текущего значения измеряемого погонного сопротивления от заданного во всем контролируемом диапазоне частот ( 10 Гц) в элементе 3 сравнения формируются два выходных управляющих сигнала, скоррелированных с величиной отклонения (рассогласования). Один выходной сигнал с элемента 3 сравнения поступает на входы первого пропорционального 4, дифференциального 5 и интегрирующего 6 усилителей, с выходов которых соответственно преобразованные сигналы подаются на входы сумматора 7. С выхода сумматора 7 сигнал поступает на вход блока 8 формирования управляющих импульсов, которые подаются на управляющие электроды тиристоров 9. В зависимости от сигнала, поступающего с выхода сумматора 7, блок 8 формирования управляющих импульсов выдает на управляющие электроды тиристоров 9 отпирающие импульсы, сдвинутые относительно нулевой точки переменного напряжения, питающего первичную обмотку трансформатора 10„ на определенный угол. Этот угол (угол регулирования тиристоров 9) меняется в зависимости от величины сигнала, поступающего с выхода сумматора 7. При этом изменяется выходное напряжение трансформатора 10, т. е. напряжение накала лампы высокочастотного автогенератора для плавки металла установки 11 для литья икропровода. Изменение напряжения накала приводит к изменению энергетических режимов автогенератора и к соответствующему изменению напряжения на высокочастотном индукторе и температуры микрованны и, следовательно, к изменению диаметра и погонного сопротивления микропровода. Второй выходной сигнал элемента 3 сравнения поступает на дополнительный пропорциональный усилитель 12, с выхода которого соответственно преобразованный сигнал подается на блок 13 управления электропривода 14 механизма 15 разрежения. Под действием этого сигнала регулируется режим работы электропривода 14 (т. е. скорость вращения электродвигателя при использовании механизма 15 разрежения ротационного типа). В результате соответствующим образом изменяется интенсивность отсоса воздуха из стеклянной трубки и, следовательно, величина разрежения в ней. Изменение разрежения в трубке вызывает изменение формы и положения микрованны в электромагнитном поле высокочастотного индуктора, что приводит к изменению диаметра и погонного сопротивления микропровода из-за изменения температуры микрованны и формы конуса растягивания. Устройство выполнено таким образом, что при уменьшении текущего измеряемого значения погонного сопротивления по сравнению с заданным номинальным значением напряжение на индукторе увеличивается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования погонного сопротивления микропровода в установке для его литья | 1979 |
|
SU860143A2 |
| Устройство автоматического регулирования погонного сопротивления микропровода в установке для его литья | 1976 |
|
SU611258A1 |
| Технологическая линия по производству литого микропровода в стеклянной изоляции | 1979 |
|
SU1081670A1 |
| Способ управления процессом литья микропровода | 1979 |
|
SU1088076A1 |
| Способ изготовления литого микропровода | 1978 |
|
SU765888A1 |
| Устройство автоматического регули-РОВАНия пОгОННОгО СОпРОТиВлЕНияМиКРОпРОВОдА | 1978 |
|
SU817751A1 |
| Способ литья микропровода в стеклянной изоляции | 1979 |
|
SU1088075A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЕЛШЕРАТУРЫ КАПЛИ ПРИ ЛИТЬЕ МИКРОПРОВОДОВ | 1972 |
|
SU424123A1 |
| Способ изготовления литого микропровода | 1972 |
|
SU514351A1 |
| Способ формирования микрованныдля лиТья МиКРОпРОВОдА B CTEK-ляННОй изОляции | 1979 |
|
SU819823A1 |
