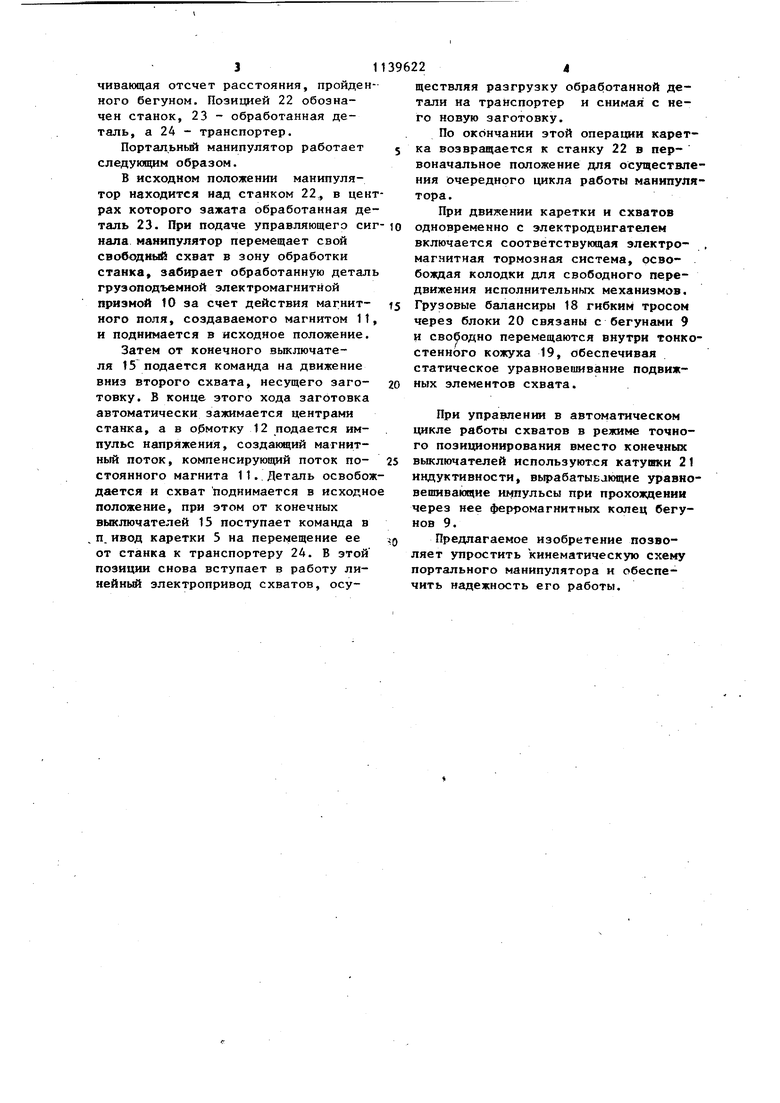
Изобретение относится к станкост ению, в частности к устройствам для транспортировки заготовок от накопителя к зоне обработки и передачи готовых изделий от станка в зо ну разгрузки. Известен портальный манипулятор, содержащий поворотную вокруг продол ной оси грузонесущую балку с устано ленной на ней кареткой, несущей схв ты с приводом их перемещения, и при вол перемещения каретки, установлен ный на направляющем элементе и связанный с кареткой ij , Недостатком известного устройства является наличие кинематически связей между кареткой и приводом его перемещения, необходимых для обеспечения поворота грузонесущей балки относительно направляющего элемента, что снижает надежность его работы. Цель изобретения - обеспечение н дежности работы устройства. Поставленная цель достигается тем, что портальный манипулятор, со держащий поворотную вокруг продольной оси грузонесущую балку с устано ленной на ней кареткой, несущей схв ты с приводом их перемещения, и при вод продольного перемещения каретки установленный на направляющем элементе и связанный с кареткой, снабжен роликами, установленными на каретке, грузонесущая балка жестко св зана с направляющим элементом, а пр вод перемещения каретки выполнен в де линейного электродвигателя с вто ричным элементом в виде электропро водной шины, расположенной на направляющем элементе,и индуктора, жестко связанного с кареткой и расположенного между направляющим элементом и грузонесущей балкой, при этом ролики расположены по обе стороны от направляющего элемента и взаимодействуют с ним. Привод перемещения каждого схвата вьшолнен в виде линейного электр двигателя с цилиндрическим индуктором, установленным на каретке, при этом вторичньм элемент двигателя связан со схватом. На фиг.1 показан портальньм манипулятор, установленный над станком, общий вид , на фиг, 2 - кинематическая схема портального ма нипулятора. Портальный манипулятор содержит грузонесущую балку 1, смонтированную на опорах 2 направляющего элемента 3, установленного на балке 1 с помощью стоек 4, каретку 5 с плоским индуктором 6 линейного электродвигателя привода перемещения каретки с вторичным элементом в виде плоской немагнитной электропроводной шины 7, смонтированной на нижнем основании направляющего элемента 3. Fla боковых противоположных стенках каретки установлены под углом к вертикали дв грузоподъемных схвата с линейными электродвигателями, каждый из которых содержит цилиндрический индуктор 8, коаксиально которому располагается вторичный элемент - бегун 9. Поверхностный слой бегунов представляет собой анизотропную структуру, состоящую из стальных. и медных шайб, насаженных на стержень из ферромагнитного материала. На нижних концах бегунов 9 установлены схваты, каждый из которых выполнен в виде грузоподъемной электромагнитной призмы 10, содержащей постоянный магнит 11 и обмотку 12.Бегуны 9 снабжены направляющими скалками 13, перемещающимися во втулках, которые разгружают бегуны 9 от радиальных усилий, повышая надежность работы схватов. На скалках 13 установлены флажки 14, взаимодействующие с конечными выключателями 15, управляющими работой и перемещением схватов. Для ориентирования каретки 5 при движении ее вдоль грузонесущей балки она снабжена роликами 16 и 17. Фиксация каретки 5 в точке останова и скалок 13 осуществляется колодочными тормозами. Вес подвижных элементов привода схватов, а также половина веса заготовок и дателей уравновешены грузовыми балансирами 18, которые свободно перемещаются в тонкостенном кожухе 19 и через блоки 20 соединены с бегунами 9. Для систем управления, обеспечивающих точное позиционирование подвижных грузов исполнительных механизмов, предусмотрена дополнитель-. ная катушка 21 индуктивности, встроенная в корпус цилиндрического индуктора 8, реагирующая на прохождение ферромагнитных элементов анизотропного слоя бегунов 9 и обеспе31
чивающая отсчет расстояния, пройденного бегуном. Позицией 22 обозначен станок, 23 - обработанная деталь, а 2А - транспортер.
Портальный манипулятор работает следующим образом.
В исходном положении манипулятор находится над станком 22, в центрах которого зажата обработанная деталь 23. При подаче управляющего сигнала манипулятор перемещает свой сзо&ояиыК схват в зону обработки станка забирает обработанную деталь грузоподъемной электромагнитной призмой 10 за счет действия магнитного поля, создаваемого магнитом 11, и поднимается в исходное положение.
Затем от конечного выключателя 15 подается команда на движение вниз второго схвата, несущего заготовку. В конце этого хода заготовка автоматически зажимается центрами станка, а в ормотку 12 подается импульс напряжения, создающий магнитный поток, компенсирующий поток постоянного магнита 11. Деталь освобождается и схват поднимается в исходное положение, при этом от конечных выключателей 15 поступает команда в п. ивод каретки 5 на перемещение ее от станка к транспортеру 24. В этой позиции снова вступает в работу линейный электропривод схватов, осу9622Л
ществляя разгрузку обработанной детали на транспортер и снимая с него новую заготовку.
По окончании этой операции каретка возвращается к станку 22 в первоначальное положение для осуществления очередного цикла работы манипулятора.
При движении каретки и схватов одновременно с электродвигателем включается соответствующая электро- , магнитная тормозная система, освобождая колодки для свободного передвижения исполнительных механизмов. Грузовые балансиры 18 гибким тросом через блоки 20 связаны с бегунами 9 И свободно перемещаются внутри тонкостенного кожуха 19, обеспечивая статическое уравновешивание подвижных элементов схвата.
При управлении в автоматическом цикле работы схватов в режиме точного позиционирования вместо конечных выключателей используются катушки 21 индуктивности, вырабатывающие уравновешивающие Ш4пульсы при прохождении через нее ферромагнитных колец бегунов 9.
Предлагаемое изобретение позволяет упростить кинематическую схему портального манипулятора и обеспечить надежность его работы.
20
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| Манипулятор | 1980 |
|
SU897498A1 |
| Устройство для подачи материала в зону обработки | 1988 |
|
SU1538965A1 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| Механизированный многоярусный накопитель | 1988 |
|
SU1699866A1 |
| Гибкий производственный модуль | 1986 |
|
SU1404273A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Манипулятор | 1989 |
|
SU1720853A1 |
| Узел манипулятора | 1982 |
|
SU1138010A3 |
| Робот | 1991 |
|
SU1781026A1 |
1. ПОРТАЛЬН1Й МАНИПУЛЯТОР, содержащий поворотную вокруг продольной оси грузонесущую балку с установленной на ней кареткой, несущей схваты с приводом их перемещения, и йривод продольного перемещения каретки, установленный на направляющем элементе и связанный с кареткой, отличающийся тем, что, с целью обеспечения надежности работы, он снабжен роликами, установленными на каретке, грузонесущая балка жестко связана с направляющим элементом, а привод перемещения каретки выполнен в виде линейного электродвигателя с вторичным элементом в виде электропроводной шины, расположенной на направляющем элементе, и индуктора, жестко связанного с кареткой и расположенного между направляющим элементом и грузонесущей балкой, при этом ролики расположены по обе стороны от направляющего элемента и взаимодействуют с ним; 8 2. Манипулятор по п.t, отличающийся тем, что привод перемещения каждого схвата выполнен в виде линейного электродвигателя с дшиндрическим индуктором, установлен пл4 на каретке, при этом вторичный элемент электродвигателя связан со схватом. со со о го ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
