Изобретение относится к робототехнике и может быть использовано в промышленных роботах.
Целью изобретения является упрощение конструкции и уменьшение массогабаритных показателей за счет упрощения конструкции механизмов поворота и горизонтального перемещения.
На фиг. 1 показан предлагаемый манипулятор, общий вид; на фиг. 2 - вариант выполнения тормозного устройства.
Манипулятор содержит основание 1, втулку 2, с которой жестко связан индуктор 3 с многофазной обмоткой, выполненной в виде полукольцевых катушек, уложенных в пазы индуктора 3, первый вторичный элемент 4, снабженный охватом (не показан) и установленный с возможностью перемещения вдоль индуктора 3, второй вторичный элемент 5, жестко соединенный с гайкой 6 механизма вертикального перемещения с винтом 7, причем втулка 2 опирается на гайку 6 с возможностью совместного вращения. В состав манипулятора входят также первое 8, второе 9 и третье 10 управляемые тормозные устройства. В одном из возможных вариантов выполнения тормозное устройство 8 содержит ползун 11 со скобой 12, установленный в продольном пазу 13, выполненном в винте 7, и опирающийся через подшипниковый узел 14 на гайку 6. К ползуну 11 прикреплен электромагнит, содержащий корпус 15 с обмоткой и якорь 16 с фрик- ционной накладкой 17, причем якорь 16 связан с корпусом 15 через пружину 18 таким образом, что при отключенной обмотке электромагнита якорь прижат к гайке 6. Аналогичным образом выполнены тормозные устройства 9 и 10, якори которых взаимодей- ствуют соответственно с втулкой 2 и первым вторичным элементом 4, однако тормозное устройство 10 не содержит ползуна и корпус 15 устанавливается непосредственно на втулке 2, а тормозное устройство 9 связано с винтом 7 посредством ползуна 19.
Манипулятор работает следующим образом.
Возможны три вида движений: горизонтальное, вертикальное и вращение вокруг оси винта 7. При горизонтальном перемещении в расцепленном состоянии находится тормозное устройство 10, а устройства 8 и 9 находятся в сцепленном состоянии. При этом втулка 2 и гайка 6 при помощи соответствующих якорей электромагнитов жестко соединены с ползунами и не могут вращать- ся, а первый вторичный элемент 4 расторможен и может перемещаться. При подаче напряжения в многофазную обмотку индуктора 3 в воздушном зазоре между индуктором 3 и вторичными элементами 4 и 5 возникает бегущее магнитное поле, которое создает тяговое усилие. Поскольку первый втЬрич- ный элемент 4 расторможен, то он совершает линейное перемещение. Максимальная
величина перемещения определяется длиной вторичного элемента 4.
При вертикальном перемещении в расцепленном состоянии находится устройство 8, а устройства 9 и 10 находятся в сцепленном состоянии, при этом первый вторичный элемент 4 жестко соединен с втулкой 2, которая в свою очередь жестко соединена с ползуном 19, а гайка 6 не связана с ползуном 11 и может вращаться. При возникновении бегущего магнитного поля тяговое усилие воздействует на второй вторичный элемент 5, заставляя последний совершать вращательное движение вокруг винта 7. Поскольку с вторичным элементом 5 жестко связана гайка 6, то последняя также вращается вокруг винта 7. При этом происходит вертикальное перемещение гайки 6, а следовательно и втулки 2, которая опирается на гайку 6. Вертикально перемещается также жестко связанный с втулкой 2 через тормозное устройство 10 первый вторичный элемент 4, снабженный схватом.
При повороте в расцепленном состоянии находится тормозное устройство 9, а в сцепленном состоянии находятся устройства 8 и 10. При этом первый вторичный элемент 4 жестко соединен с втулкой 2, гайка 6 жестко соединена с ползуном 11, но втулка 2 не связана с ползуном 19 и может вращаться вокруг оси винта 7. При возникновении бегущего магнитного поля тяговое усилие воздействует на второй вторичный элемент 5. Однако поскольку он жестко связан с ползуном 11 и не может перемещаться, то сила противодействия воздействует на индуктор 3, заставляя его вращаться вместе с втулкой 2 вокруг оси ходового винта.
При соответствующем включении тормозных устройств возможно одновременное выполнение двух движений - горизонтального и вертикального, либо горизонтального и поворота.
Таким образом в манипуляторе составные части двигателя, а именно индуктор, первый и второй подвижные элементы, являются одновременно элементами конструкции манипулятора, а также элементами механизмов горизонтального перемещения и поворота, что значительно упрощает конструкцию манипуляторов и снижает его массу.
Формула изобретения
Манипулятор, содержащий электродвигатель, связанный с механизмом вертикального перемещения исполнительного органа, выполненным в виде передачи винт-гайка, и механизмами его поворота и горизонтального перемещения, отличающийся тем, что, с целью упрощения конструкции и уменьшения массо-габаритных показателей за счет упрощения конструкции механизмов поворота и горизонтального перемещения исполнительного органа, он снабжен тремя управляемыми тормозными устройствами, а электродвигатель и механизмы поворота и горизонтального перемещения исполнительного органа выполнены в виде индуктора с многофазной обмоткой, расположенного в горизонтальной плоскости, втулки,установленной на винте механизма вертикального перемещения с возможностью поворота и жестко связанной с индуктором, и двух вторичных элементов, имеющих возможность электромагнитного взаимодействия с индуктором, при этом первый из ука,занных элементов установлен с возможностью перемещения
0
вдоль индуктора, а второй выполнен в виде кольца, жестко связанного с гайкой механизма вертикального перемещения, причем первое тормозное устройство установлено на винте этого механизма с возможностью перемещения вдоль оси винта и с возможностью взаимодействия с гайкой этого механизма, второе тормозное устройство также установлено на этом винте с возможностью перемещения вдоль его оси и с возможностью взаимодействия с втулкой, а третье тормозное устройство установлено на втулке с возможностью взаимодействия с первым элементом.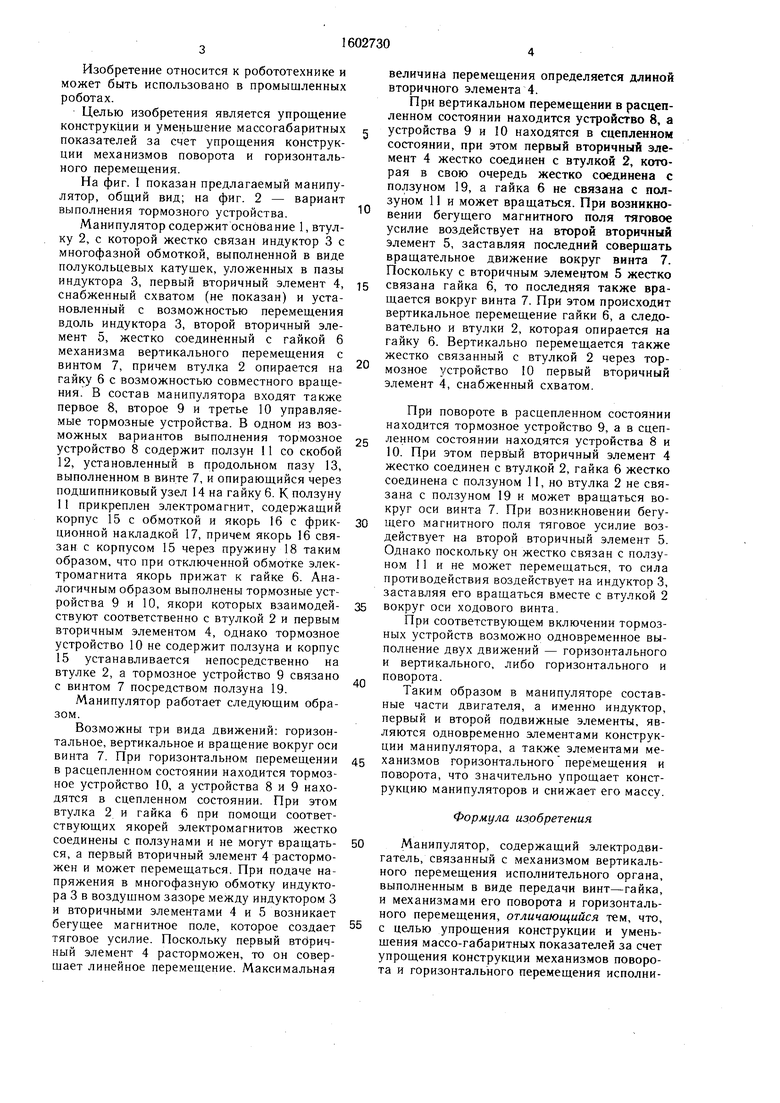
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| Устройство для перемещения ферромагнитных листов | 1987 |
|
SU1465159A1 |
| Плавучая буровая установка | 1982 |
|
SU1102879A1 |
| Тормозное устройство грузовой тележки | 1979 |
|
SU781101A1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Конвейерная тележка | 1976 |
|
SU581059A1 |
| Уравновешивающее устройство | 1986 |
|
SU1357097A1 |
| Устройство для передвижения слитковоза | 1975 |
|
SU552221A1 |
| Линейный асинхронный двигатель | 1975 |
|
SU575737A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1984 |
|
SU1232343A1 |
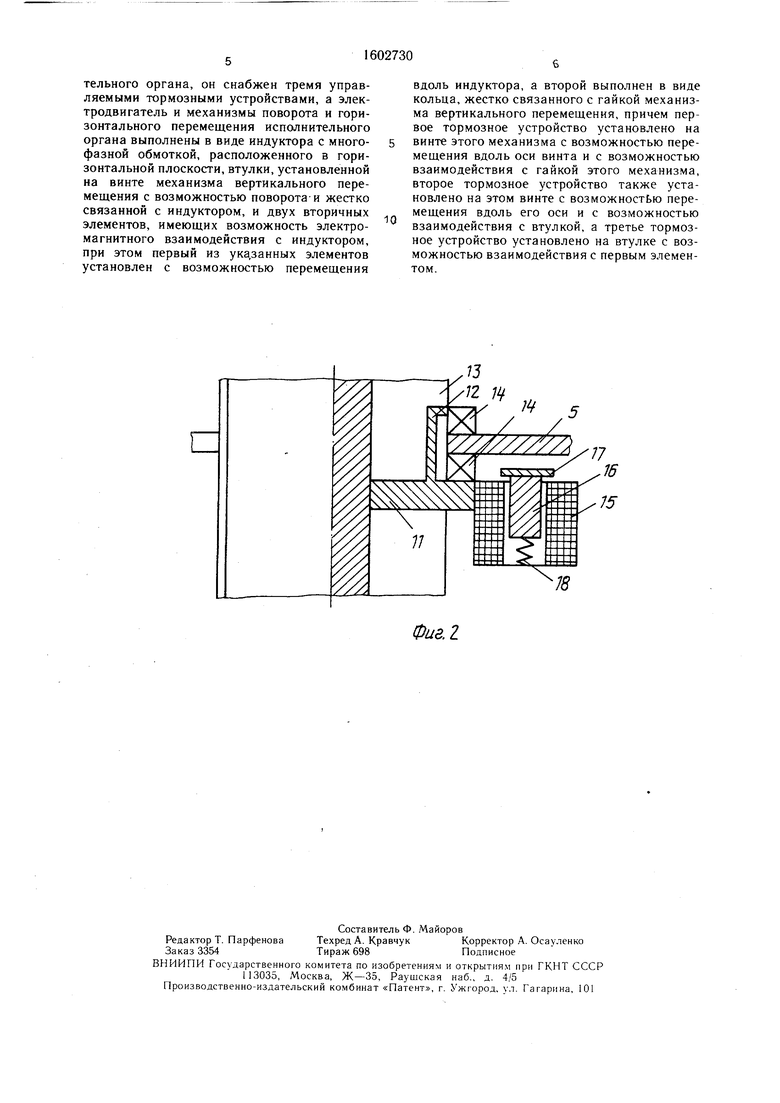
Изобретение относится к робототехнике и может быть использовано в промышленных роботах. Целью изобретения является упрощение конструкции и уменьшение массогабаритных показателей за счет упрощения конструкции механизмов поворота и горизонтального перемещения. При включении индуктора 3 с многофазной обмоткой, жестко связанного с втулкой 2, расположенной на винте 7 механизма вертикального перемещения, включающего также гайку 6, и перемещениях вторичных элементов 4 или 5 или самого индуктора 3 в зависимости от того какое из тормозных устройств 8, 9 или 10 находится в расцепленном состоянии происходит перемещение исполнительного органа, установленного на элементе 4 в горизонтальном или вертикальном направлении, или поворот вокруг оси винта 7. 2 ил.
78
Фиг. 2
| Манипулятор | 1981 |
|
SU963847A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
