(54) УСТРОЙСТВО ДЛЯ ФИКСАЦИИ КОНТЕЙНЕРОВ ПРИ РАЗГРУЗКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки контейнеров | 1979 |
|
SU763204A1 |
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Мусоровоз | 1981 |
|
SU982987A1 |
| Мусоровоз | 1985 |
|
SU1331744A1 |
| Транспортное средство со сменным контейнером | 1986 |
|
SU1397329A1 |
| Устройство для подъема сменной грузонесущей емкости транспортного средства | 1986 |
|
SU1386501A1 |
| МУСОРОВОЗ | 2008 |
|
RU2381163C1 |
| Мусоровоз | 1982 |
|
SU1071534A1 |
| Устройство для разгрузки контейнеров в кузов мусоровоза | 1982 |
|
SU1068351A1 |
| Мусоровоз | 1985 |
|
SU1247316A1 |

I
Изобретение относится к устройствам для фиксации контейнеров при разгрузке в мусоровозы.
Известно устройство для фиксации контейнеров при разгрузке, включающее связанную с параллелограммным механизмом раму, снабженную захватом, взаимодействующим с упором, закрепленным на контейнере 1.
Недостатком указанного устройства является ненадежная фиксация контейнера на раме при его опрокидывании.
Наиболее близким по технической сущности к изобретению является устройство для фиксации контейнеров при разгрузке, включающее установленные на горизонтальной оси поворотную раму, снабженную верхним захватом, взаимодействующим с верхним упором контейнера, и кулачок, связанный посредством передаточного механизма с нижним захватом, закрепленным на раме и взаимодействующим с нижним упором контейнера 2.
Для этого устройства характерны сложная конструкция и низкая эксплуатационная надежность, так как его передаточный механизм выполнен в виде системы подпружиненных рычагов, несущих повыщенные нагрузки.
Кроме того, оно имеет ограниченное применение из-за невозможности перемещения оси рамы в пространстве.
Цель изобретения - упрощение конструкции и повыщение эксплуатационной надежности..
Цель достигается тем, что нижний захват состоит из двух элементов, первый из которых выполнен в виде крюка, взаимодействующего с задней плоскостью нижнего упора, а второй - в виде траверсы, взаимодействующей с его передней плоскостью и соединенtoной своими концами со штоками силовых цилиндров, при этом передаточный механизм выполнен в виде контактирующего с кулачком ролика, прикрепленного к золотнику гидрораспределнтеля, сблокированного с названными силовыми цилиндрами.
15
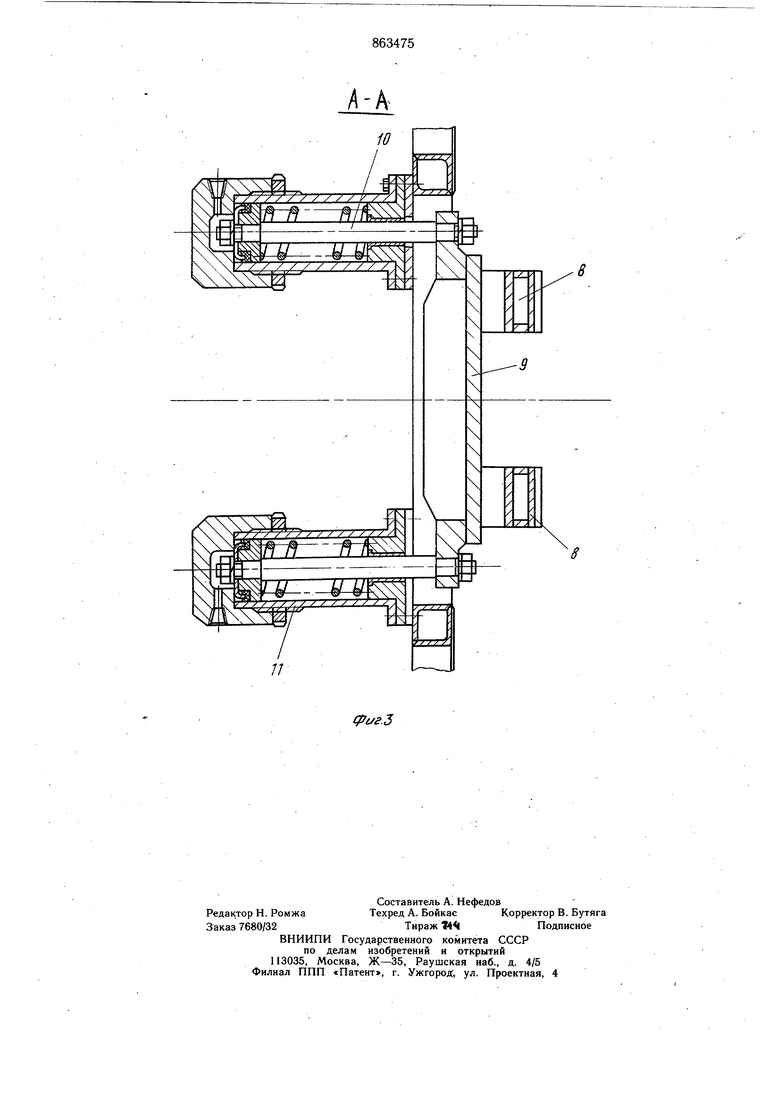
На фиг. 1 схематично изображено устройство для фиксации контейнеров при разгрузке в исходном и приподнятом положениях, вид сбоку; на фиг. 2 - то же, при опрокидывании контейнера; на фиг. 3 - разрез А-А
20 на фиг. 1.
Устройство включает установленные на горизонтальной оси 1 поворотную раму 2, снабженную верхним заввхватом 3, взаимодействующим с верхним упором 4 контейнера 5, и кулачок 6, связанный посредством передаточного механизма с нижним захватом, закрепленным на раме и взаимодействующим с нижним упором 7 контейнера. Нижний захват состоит из двух элементов, первый из которых выполнен в виде крюка 8, взаимодействующего с задней плоскостью нижнего упора 7, а второй - в виде траверсы 9, взаимодействую.щей с его передней плоскостью. Траверса соединена своими концами с подпружиненными штоками 10 силовых цилиндров 11 одностороннего действия. Передаточный механизм выполнен в виде контактирующего с кулачком 6 ролика 12, прикрепленного к подпружиненному золотнику 13 гидрораспределителя 14, закрепленного на раме и сблокированного с силовыми цилиндрами 11. Рама 2 связана с шарнирными параллелограммными механизмами мусоровоза 15, нижние звенья которых выполнены в виде силовых цилиндров 16 для опрокидывания контейнеров, штоки которых прикреплены к проущине 17, а их верхние звенья 18 шарнирно присоединены к штокам силовых цилиндров 19 для приподнимания контейнеров.
При работе устройства посредством силовых цилиндров 19 осупдествляется фиксация верхнего захвата 3 под верхним упором 4, контейнера 5, а крюка 8 - под его нижним упором 7 с последующим приподниманием контейнера. При этом происходит поворот оси 1 и кулачка 6, рабочая поверхность ко торого изменяет свое положение относительно золотника 13 гидрораспределителя 14. В крайнем приподнятом положении контейнера кулачок переводит золотник в положение, при котором полости силовых цилиндров 11 сообщаются с бесштоковыми полостями силовых цилиндров 16 для приподнимания контейнеров, а траверса 9 из-за отсутствия давления в названных полостях посредством пружин, имеющихся в силЬвых цилиндрах 11 удерживается в исходном положении. Затем при помощи силовых цилиндров 16 и проушин 17 поворачивают раму 2 с контейнером вокруг оси 1. Одновременно с включением силовых цилиндров 6 происходит включение силовых цилиндров II, щтоки которых, перемещая траверсу 9, прижимают ее к передней плоскости нижнего упора 7, обеспечивая надежную фиксацию контейнера на поворотной раме при его опрокидывании.
При этом ролик 12 золотника выходит из контакта с копирной частью кулачка 6.
После опорожнения в кузов мусоровоза контейнер силовыми цилиндрами 16 возвращается в приподнятое положение. Траверса 9 возвращается в исходное положение, освобождая нижний упор 7. При последующем опускании контейнера силовыми цилиндрами 19 происходит расцепление верхнего захвата 3 и крюка 8 с соответствующими упорами контейнера.
Формула изобретения
Устройство для фиксации контейнеров при разгрузке, включающее установленные
0 на горизонтальной оси поворотную раму, снабженную верхним захватом, взаимодействующим с верхним упором контейнера, и кулачок, связанный посредством передаточного механизма с нижним захватом, закрепленным на раме и взаимодействющим с нижним упором контейнера, отличающееся тем, что, с целью упрощения конструкции и повышения эксплуатационной надежности, нилший захват состоит из двух элементов, первый из которых выполнен в виде крюка,
0 взаимодействующего с задней плоскостью нижнего упора, а второй - в виде траверсы взаимодействующей с его передней плоскостью и соединенной своими концами со штоками силовых цилиндров, при этом передаточный механизм выполнен в виде контактирующего с кулачком ролика, прикрепленного к золотнику гидрораспределителя, сблокированного с названными силовыми цилиндрами.
Источники информации,
принятые во внимание при экспертизе
JS
п
А-А
Е
7
V ///////////
N
/ /
(иг.5
