Изобретение относится к мусоровозам, используемым для перевозки мусора в контейнерах.
Известен мусоровоз, содержащий смонтированную на транспортном средстве платформу для контейнеров, на которой установлен поворотный кран с захватом, снабженный гидрораспределителями, имеющими ручное управление при помощи рычажных включателей 1.
Наиболее близким по технической сущности к изобретению является мусоровоз, содержащий смонтированную на транспортном средстве платформу для съемных контейнеров, на которой установлен кран со стрелой, снабженной захватом и гидроцилиндры для поворота крана, подъема стрелы и ее выдвижения с гидрораспределителями 2.
Недостатком указанных мусоровозов является низкая производительность из-за необходимости выхода оператора из кабины транспортного средства при проведении погрузочно-разгрузочных работ, ручной фиксации захвата на контейнерах и визуальной корректировки их перемещения. Кроме того, непосредственный контакт оператора с контейнерами, загруженными мусором, существенно ухудщает санитарногигиенические условия его работы.
Цель изобретения - повыщение производительности и улучщение санитарно-гигиенических условий работы оператора.
Поставленная цель достигается тем, что мусоровоз снабжен системой автоматического управления процессами погрузки и разгрузки контейнеров, выполненной из многоходового гидравлического следящего устройства с поворотным золотником, сблокированным с первым гидродвигателем обратной связи, который через первый делитель потока параллельно подключен к гидроцилиндру для поворота крана, гидрораспределитель которого подсоединен к многоходовому крану управления, трехходового гидравлического устройства с основным поворотным золотником, сблокированным с первым гидродБигателем обратной связи и выполненным полым с размещенным в нем дополнительным поворотным золотником, сблокированным с вторым гидродвигателем обратной связи, который через второй делитель потока параллельно подключен к гидроцилиндру для поворота захвата в горизонтальной плоскости, гидрораспределитель которого через трехходовое гидравлическое следящее устройство связан с многоходовым краном управления, блоков гидромеханической памяти подъема и выдвижения стрелы, выполненных с кулачковыми валами, сблокированными соответственно с третьим и четвертым гидродвигателями обратной связи, параллельно подключенными через делители потоков соответственно к гидроцилиндру для подъема стрелы и к гидроцилиндру для ее выдвижения, и
с перепускными клапанами, соединенными через управляемые клапаны с гидрораспределителями названных гидроцилиндров и через основные обратные клапаны с многоходовым краном управления, который
связан через дополнительные обратные клапаны с трехходовым гидравлическим следящим устройством, и гидроцилиндров для перемещения захвата в вертикальной плоскости и его фиксации, снабженных гидрораспределителями, соединенными соответственно с перепускными клапанами блока гидромеханической памяти выдвижения стрелы и через управляемые клапаны, смонтированные парами на платформе под каждым контейнером симметрично отно5 сительно ее продольной оси, с многоходовым краном управления.
Кроме того, система автоматического управления процессами погрузки и разгрузки контейнеров снабжена установленными между гидрораспределителем гидроцилинд0 ра для поворота крана и многоходовым гидравлическим следящим устройством управляемыми обратными клапанами, сблокированными с одним из перепускных клапанов блока гидромеханической памяти
. подъема стрелы.
При этом каждая пара управляемых клапанов соединена параллельно многоходовому крану управления через основные обратные клапаны с одним из перепускных клапанов блоков гидромеханической памяQ ти подъема и выдвижения стрелы.
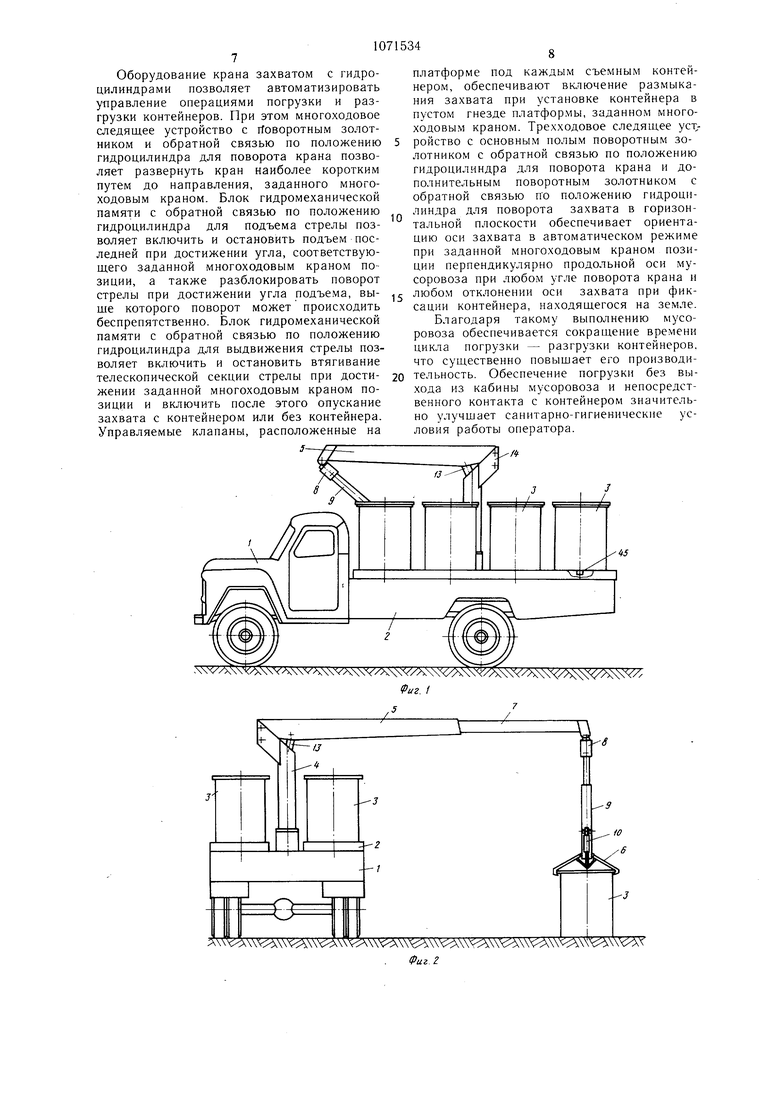
На фиг. 1 схематично изображен мусоровоз, вид сбоку в транспортном положении; на фиг. 2 - то же, вид сзади в рабочем положении; на фиг. 3 - схема системы автоматического управления процессами по2 грузки и разгрузки контейнеров.
Мусоровоз содержит транспортное средство 1, грузовую платформу 2 для съемных контейнеров 3 и поворотный кран 4 со стрелой 5 и захватом 6. Стрела 5 выполнена с телескопической секцией 7, а захват 6-
с гидроцилиндром 8 для поворота в горизонтальной плоскости, гидроцилиндром 9 для перемещения в вертикальной плоскости и гидроцилиндром 10 для его фиксации (фиг. 1 и 2). Кран 4 снабжен гидроцилиндj ром 11 для поворота, который соединен с гидрораспределителем 12 (фиг. 3), гидроцилиндром 13 для подъема стрелы, который соединен с гидрораспределителем 14, и гидроцилиндром 15 для выдвижения телескопической секции 7 стрелы 5, который соеди0 нен с гидрораспределителем 16. При этом гидроцилиндр 8 соединен с гидрораспределителем 17, гидроцилиндр 9 - с гидрораспределителем 18, а гидроцилиндр 10 - с гидрораспределителем 19.
Полости управления гидрораспредели5 телей 12, 14, 16-19 соединены с напорной магистралью 20 через многоходовый кран 21 управления. Полости управления гидрораспределителя 12 соединены с многоходовым краном 21 через многоходовое гидравлическое следящее устройство 22, поворотный золотник 23 которого связан механической связью 24 с поворотным гидродвигателем 25 обратной связи, подключенным параллельно гидроцилиндру 11 при помощи делителей 26 потока.
Между полостями управления гидрораспределителя 12 и поворотным золотником 23 установлены управляемые обратные клапаны 27. Полость управления гидрораспределителя 14 соединена с многоходовым краном 21 через обратные клапаны 28 и 29 и клапан 30, подключенный к блоку 31 гидромеханической памяти, состоящему из четырех перепускных клапанов 32, каждый из которых соответствует одной паре контейнеров при их, установке на платформе 2, симметрично расположенных относительно продольной оси платформы, а также клапана 33, связанного с полостями управления обратных клапанов 27, и из кулачкового вала 34, соединенного механической связью 35 с поворотным гидродвигателем 36 обратной связи, подключенным параллельно гидроцилиндру 13 при помощи делителей 37 потока. Полость управления гидрораспределителя 16 связана с многоходовым краном 21 через обратные клапаны 28, перепускные клапаны 32 блока 31 гидромеханической памяти и через клапан 38, подключенный к блоку 39 гидромеханической памяти. Последний состоит из четырех перепускных клапанов 40, каждый из которых соответствует одной паре контейнеров, симметрично расположенных относительно продольной оси платформы 2, и из кулачкового вала 41, соединенного механической связью 42 с поворотным гидродвигателем 43 обратной связи, включенным параллельно гидроцилиндру 15 при помощи делителей 44 потока. Полость управления гидрораспределителя 18 соединена с многоходовым краном 21 через обратные клапаны 28 и блок 39 гидромеханической памяти. -Полость управления гидрораспределителя 19 соединена с многоходовым краном 21 через управляемые клапаны. 45, расположенные под съемными контейнерами 3 на платформе 2 (фиг. 1). Полости управления гидрораспределителя 17 соединены с многоходовым краном 21 через обратные клапаны 28 и 29 и через трехходовое гидравлическое следящее устройство 46, снабженное основным полым поворотным золотником 47, соединенным механической связью 48 с поворотным гидродвигателем 25 обратной связи, и дополнительным поворотным золотником 49, соединенным механической связью 50 с поворотным гидродвигателем 51 обратной связи, подключенным параллельно гидроцилиндру 8 при помощи делителей 52 потока. Напорная магистраль 20 гидросистемы подключена к насосу, а сливная магистраль 53 - к масляному баку, которые смонтированы на
транспортном средстве 1. Описанные элементы образуют систему автоматического управления процессами погрузки и разгрузки контейнеров.
Мусоровоз работает следующим образом.
Оператор, установив мусоровоз в такое положение, чтобы погружаемый контейнер находился в рабочей зоне действия крана и в зоне прямой видимости из кабины, ручным поочередным включением золотников гидрораспределителей 12, 14 и 16 приводит в действие гидроцилиндры II, 13 и 15 соответственно для поворота крана 4, подъема стрелы 5 и выдвижения ее телескопической секции 7, тем самым устанавливая поворотный кран 4 в рабочее положение, удобное для захвата контейнера 3, стоящего на земле. Затем ручным включением золотника гидрораспределителя 17 обеспечивается воздействие гидроцилиндра 8, поворачивающего захват 6 в соответствии с положением контейнера 3 в плане, а включением золотников гидрораспределителей 18 и 19 обеспечивается опускание захвата 6 при помощи гидроцилиндра 9 и фиксация контейнера 3 посредством гидроцилиндра 10 (фиг. 2).
Далее работа поворотного крана осуществляется в автоматическом режиме, для чего оператор устанавливает многоходовой кран 21 в положение, соответствующее одному из пустых гнезд под контейнер 3 на платформе 2. Поскольку в пустом гнезде контейнер не оказывает воздействия на на соответствующий клапан 45, то жидкость под давлением поступает через этот клапан в управляющую полость гидрораспределителя 19, обеспечивая надежную фиксацию контейнера 3 захватом 6 при помощи гидроцилиндра 10. Жидкость через обратные клапаны 28 и 29 и клапан 30 подается в управляющую полость гидрораспределителя 14 и включает его на подъем стрелы 5. Одновременно с выдвижением штока гидроцилиндра 13 подачей жидкости через делители 37 потока поворачивается вал гидродвигателя 36 обратной связи и связанный с ним посредством механической связи 35 кулачковый вал 34 блока 31 гидромеханической памяти. Подъем стрелы 5 происходит до тех пор, пока кулачковый вал 34 не откроет один из перепускных клапанов 32, посредством которого через соответствующее отверстие многоходового крана 21 и обратный клапан 28 рабочая жидкость под давлением начнет поступать в управляющую полость клапана 30, закрывая его и тем самым переводя гидрораспределитель 14 в нейтральное положение, прекращая подъем стрелы 5. Одновременно рабочая жидкость протекает через клапан 38 и включает гидрораспределитель 16 на втягивание телескопической секции 7 стрелы 5 посредством гидроцилиндра 15.
При подъеме стрелы 5, когда достигается заданный угол подъема, выще которого поворот стрелы с грузом происходит беспрепятственно, кулачковый вал 34 блока 31 гидромеханической памяти открывает клапан 33 и рабочая жидкость через этот клапан поступает к управляющим полостям обратных клапанов 27, открывая их. От многоходового крана 21 в зависимости от его положения в левую или правую полость многоходового следящего устройства 22 поступает под давлением рабочая жидкость, которая затем подается на вход одного из обратных клапанов 27 и при его открывании поступает в соответствующую полость управления гидрораспределителя , включая тем самым гидроцилиндр 11 на поворот крана 4. Многоходовое следящее устройство 22 подключено таким образом, что поворот крана 4 с любого положения до заданного про. исходит кратчайщим путем по наименьшей дуге. Поворот крана 4 продолжается до тех пор, пока золотник 23, поворачивающийся посредством механической связи 24 вместе с валом гидродвигателя обратной связи, не перекроет отверстие в корпусе многоходового следящего устройства 22, через которое поступает рабочая жидкость к соответствующему обратному клапану 27. Одновременно с поворотом крана 4 относительно продольной оси платформы 2 происходит поворот захвата 6 на угол, равный по величине и противоположный по направлению углу поворота крана 4, так, что ось сим.метрии захвата 6 остается перпендикулярной продольной оси платформы 2. Это обеспечивается поворотом основного полого золотника 47 и дополнительного золотника 49 трехходового следящего устройства 46 синхронно повороту золотника 23 многоходового следящего устройства 22. При повороте крана 4 посредством гидроцилиндра 11 поворотный гидродвигатель 25 обратной связи через .механическую связь 48 поворачивает основной золотник 47 относительно дополнительного золотника 49, удерживаемого на месте механической связью 50 при выключенном гидрораслределителе 17, приче.м полость между зо.ютниками 47 и 49 трехходового следящего устройства 46, в которую от крана 21 через обратные клапаны 28 и 29 поступает под давлением рабочая жидкость, сообщается с одной из полостей между золотником 47 и корпусом следящего устройства 46, из которой рабочая жидкость подается в одну из управляющих полостей гидрораспределителя 17, включая гидроцилиндр 8 на поворот захвата 6 в сторону, обратную повороту крана 4. При этом гидродвигатель 51 обратной связи через .механическую связь 50 поворачивает дополнительный золотник 49 вслед за основным золотником 47. В случае остановки крана 4 останавливается и основной золотник 47, а дополнительный золотник 49 перекрывает отверстие трехходового следящего устройства 46, сообщающее полость между золотниками 47 и 49 с полостью между золотником 47 и корпусом следящего ройства 46, поворот захвата 6 тоже прекращается. При достижении заданной вели1.:ины втягивания телескопической секции 7 стрелы 5 кулачковый вал 4 блока 39 гид(;1омеханической памяти открывает одни из перепускных клапанов 40, на вход которого от многоходового крана 21 через один i3 обратных клапанов 28 подается иод давлением рабочая жидкость. Далее последняя поступает в управляющую полость клапана 38, выключая его, и в управлиюндую полость гидрораспределителя 18, включая гидроцилиндр 9 на опускание захвата 6. Опускание захвата 6 происходит после того, как стрела 5 крана 4 повернется до заданного на правления, подни.мется ;i.) заданного угла подъема, а телескопическая секдля 7 втянется до заданной величины, при утом захват 6 с контейнером 3 останавливаегся на определенной высоте над пустым гнездом платфор.мы 2. При опускании коптейпер 3 сверху воздействует на клапан 45, который открывается и обеспечивает подачу рабочей жи.акости в управляю1цую полост::, гидрораспределителя 19, обеспечивая размыкание захвата 6 за счет втягивания штока i-идроцилиндра 10. Таким образом, после захватывания при помощи руч1-1ого управления захвато.м 6 коптейнера 3 с .мусором, стоящего на зем.ае, в авто.матйческом осуществляется подъе.м стре-лы 5, нпе ее те:1ескопической секции 7, плане крана 4 с одиовреме1 пым том в плапе захвата 6 и контейнера 6 до установки над пустым гнездс)м iMar Opмы 2, предварительно заданным посредством МНОГОХОДОВОГО) крана 21, оггуск пие захвата 6 с контейнеро.м 3 до vciaiiOBKil последнего в пустое гнездо (||0р.уы .ч размь кание захвата 6, пос.le neifj Miioi oходовой кран 21 переводится, в нейтральное положение. Для снятия пустого контейнера 3 с платформы 2 оператор устанавливает .мпогоходовой кран 21 в cooтвeтcтвyюiд XJ позицию, после чего манипуляции крапа 4 и захвата 6 происходят в автоматячс ком режиме 8 описанной иос.ледователыюст ; до момента установки захвата 6 ыад пустым контейнером 3. Затем оператор при полк-.чпи ручпого управления гидрораспроде.пгголсм 19 раскрывает захват 6 и формнрх ет его на пустом контейнере 3, причем этг фяксация может производиться без визуального коптроля со стороны оиерат ;)оа, ioскольку захват 6 автоматически о)иеитируется в плапе относителыы прол.ольпой оси платформы 2. Подъе.ч nycTOi o контейпера 3, перенос его и устаповку lia зе.ыю производится при ручном упраь,-:е1;,чи г.идрораспределителя.ми. При необхо;: мости оператор осуилеств.тяет ко:1 -ро,чь з;; п.еремещениями крана 4 и захвата 6 injiocpe.iственпо из кабины. Оборудование крана захватом с гидроцилиндрами позволяет автоматизировать управление операциями погрузки и разгрузки контейнеров. При этом многоходовое следящее устройство с гТоворотным золотНИКОМ и обратной связью по положению гидроцилиндра для поворота крана позволяет развернуть кран наиболее коротким путем до направления, заданного многоходовым краном. Блок гидромеханической памяти с обратной связью по положению гидроцилиндра для подъема стрелы позволяет включить и остановить подъем последней при достижении угла, соответствующего заданной многоходовым краном позиции, а также разблокировать поворот стрелы при достижении угла подъема, выше которого поворот может происходить беспрепятственно. Блок гидромеханической памяти с обратной связью по положению гидроцилиндра для выдвижения стрелы позволяет включить и остановить втягивание телескопической секции стрелы при достижении заданной многоходовым краном позиции и включить после этого опускание захвата с контейнером или без контейнера. Управляемые клапаны, расположенные на платформе под каждым съемным контейнером, обеспечивают включение размыкания захвата при установке контейнера в пустом гнезде платформы, заданном многоходовым краном. Трехходовое следящее уст,рОЙСТВО с основным полым поворотным 30лотником с обратной связью по положению гидроцилиндра для поворота крана и дополнительным поворотным золотником с обратной связью по положению гидроцплиндра для поворота захвата в горизонтальной плоскости обеспечивает ориентацию оси захвата в автоматическом режиме при заданной многоходовым краном позиции перпендикулярно продольной оси мусоровоза при любом угле поворота крана и любом отклонении оси захвата при фиксации контейнера, находящегося на земле. Б.тагодаря такому выполнению мусоровоза обеспечивается сокращение времени цикла погрузки - разгрузки контейнеров, что существенно повышает его производительность. Обеспечение погрузки без выхода из кабины мусоровоза и непосредственного контакта с контейнером значительно улучшает санитарно-гигиенические условия работы оператора. . . . . . х X х, A y xJ:xл vx x.s


| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1985 |
|
SU1351842A1 |
| Загрузочное устройство мусоровоза | 1985 |
|
SU1323471A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| МУСОРОВОЗ КУЗОВНОЙ ЗАКРЫТОГО ТИПА | 2007 |
|
RU2357910C2 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Мусоровоз | 1986 |
|
SU1359221A1 |
| Мусоровоз | 1986 |
|
SU1331745A1 |
| Устройство для загрузки мусоровозов | 1986 |
|
SU1337321A1 |

1. МУСОРОВОЗ, содержащий с.монтированную iia транснортно.м средстве платформу ;i,.TH съе.мны.х контейнеров, на которой установлен кран со стрелой, снабженной захватом, и гидроиилиндры для новорота крана, нодъема стрелы и ее выдвижения с гидрораспределителями, отличающийся тем, что, с ие;1ью. повышения нроизводительности и улучн1ения санитарногигиенически.х условий работы оператора, .мусоровоз снабжен системой автоматического управления процессами погрузки и разгрузки контейнеров, выполненной из МНОГОХО.ЦОВОГО гидравлического следящего устройства с новоротным золотником, сблокированным с первым гидродвигателем обратной связи, который через первый делитель потока параллельно подключен к гидроцилиндру для поворота крана, гидрораспределитель которого подсоединен к многоходовому крану управления, трехходового гидравлического следящего устройства с основным поворотным золотником, сблокированным г первым гидродвигателем обратн(№; связи и вьи1о; р1енным полым с раз.меи1ея|;ьгм в не.м дополнительным поворотным золотником, сблокированны.м с вторь м гидродвигате. ie.i обратной связи, который через второй до.1ител1, потока параллельно подк;1.1Г)чеп к ги.троцилиндру для поворота захвата в ri|)изонтальной плоскости, гидрораспределитель которого через трехходовое гидравлическое следящее устройство связап с многоходовым краном управления, блоков гидромеханической намяти подъе.ма и выдвижения стрелы, вынолненных с кулачковыми валами, сблоксированными соответственно с третьим и четвертым гидродвигателями обратной связи, параллельно подключенными через делители потоков соответственно к гидроцилиндру для подъема стрелы и к гидроцилиндру для ее выдвижения, и с перепускными клапанами, соединенными через управляемые клапаны с гидрораснределителями названных гидроцилиндров и через основные обратные клананы с .многоходовы.м краном управления, который связан через дополнительные обратные клапаны с трехходовым гидравлисо ческим следящим устройством, и гидроцилиндров для нере.мегцения захвата в верти(Я кальной плоскости и его фиксации, снабженных гидрораспределителями, соединенными соответственно с перенускны.ми кланана.ми блока гидро.механической па.мяти выдвижения стрелы и через управляе.мые клапаны, смонтированные парами на платформе под каждым контейнеро.м симмето рично относительно ее продольной оси, с многоходовы.м крано.м унравления. 2.Мусоровоз по п. 1, отличающийся те.м, что система автоматического управлесд ния процессами погрузки и разгрузки консо тейнеров снабжена установленными между 4 гидрораснределителем- гидроцилиндра для поворота крана и .многоходовым гидравлически.м следящим устройством управляемыми обратны.ми клапанами, сблокированными с одним из lepenycKHbix клапанов блока гидромеханической памяти подъема стрелы. 3.Мусоровоз но н. I, отличающийся тем, что каждая пара управляемых клапанов соединена параллельно многоходовому крану унравлення через основные обратные клапаны с одним из нерепускных клапанов блоков гидромеханической намяти подъема и выдвижения стрелы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР ,.NO 175424, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| для уборки городов и зданий общественного назначения | |||
| Каталогсправочник | |||
| М., ЦНИИТЭстрой.маш, 1977, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
