И бретеиис относится к ко.ммуна.пьному ма111нностр(.)скик), в частности к мусорово- :-1ам.
Цель изобретения -- расширение функциональных возможностей мусоровоза путем обеспечомия загрузки контейнеров раз.1ичной ширины при одновременном повышении надежности в работе.
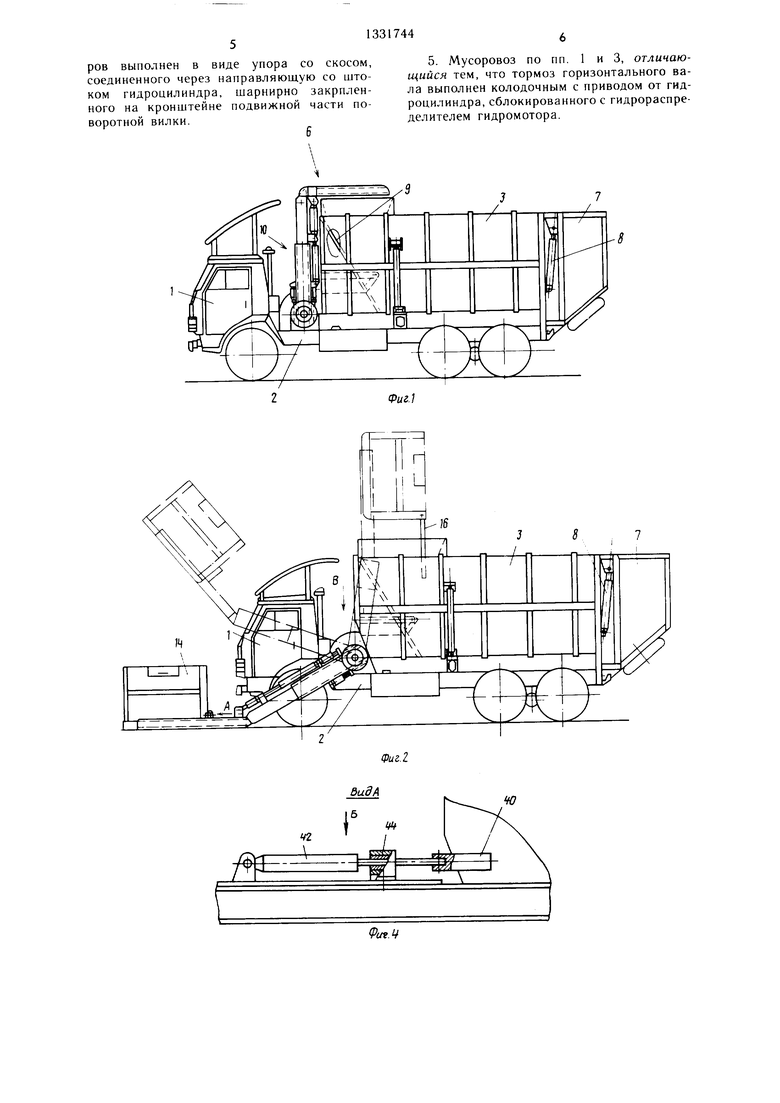
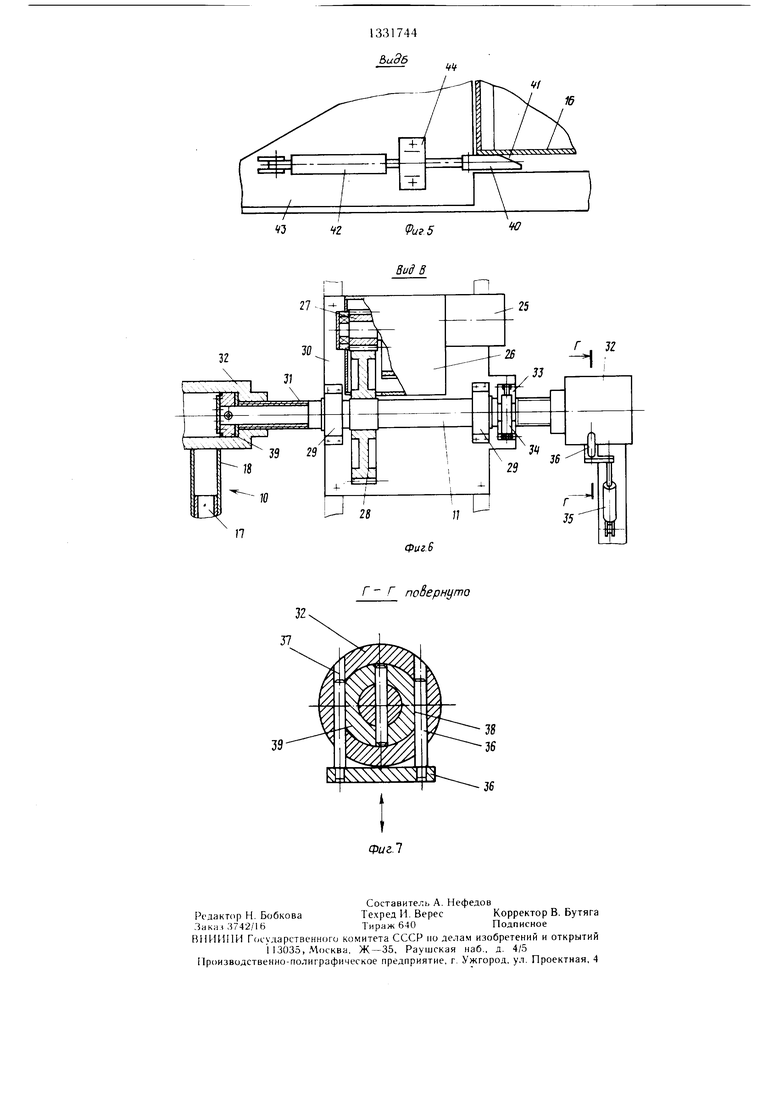
На фиг. 1 с.хематично изображен мусоровоз, вид сбоку в транснортном положении; на фиг. 2то же, в рабочем положении; на фиг. 3 -- то же, вид сверху; на фиг. 4 - вид А на фи1 2; на фиг. 5 - вид Б на фиг. 4; на фиг. 6 - вид В на фиг. 2; на фиг. 7 - разрез Г-Г на фиг. 6.
Мусоровоз содержит транспортное средство 1 с установленным на его раме 2 опрокидывающимся кузовом 3 с загрузочным отверстием 4 в передней части его крыпш 5, загрузочное устройство 6 и откидывающийся задний борт 7 посредством гидроцилиндров 8. Загрузочное отверстие 4 может быть закрыто крышкой с приводными гидроцилиндрами, сблокированными с приводом загрузочного устройства 6. Внутри кузова установлена уплотнительная плита 9 с приводом для выталкивания и уплотнения мусора. Загрузочное устройство 6 выполнено из двух поворотных консо.чьных рычагов 10 с приводом, смонтированных на горизонтальном валу 1 1 в передней части рамы транс 1Ортного средства, поворотной вилки состояпгей из двух зубьев 12 и 13 д.тя захвата и креплепия большегрузных контейнеров 14 с приводным гидроцилиндром 15. Большегрузные контейнеры имеют средства для ввода в них зубьев 12 и 13 вилки, выполненные либо в виде карманов, либо в виде проемов, смонтированных в основании контейнеров и крышки 16. Рычаги 10 выполнены раздвижными и состоят из двух коаксиально расположенных частей 17 и 18, например труб, изготовленных из высокопрочных легких материалов. Раздвижение частей 17 и 18 осуществляется приводными гпдроцилиндрами 19. Части 17 соединены между собой раздвижной балкой аналогичной конструкции, состоящей также из двух частей 20 и 21, которые жестко присоединены к частим 17 рычагов 10 и связаны между собой приводным гидроцилиндром 22, снабженным гидроза.мком. К неподвижной части 21 балки шарнирно присоединено основание 23 вилки с зубьями 12 и 13, при этом п б 12 жестко присоединен к основанию 23, а зуб 13 выполнен 1ОдвижпЬ)1м относительно зуба 12. Внутри основания 23 выполпеп капал, в котором установлен гидроцилпндр 24, шток которого присоединен к подвижному зубу 13, а корпус к ocп(Jвaнию 23.
Привод горизонтального вала 11 выполнен в виде гидромотора 25, подключенного через гидрораспределитель к гидросистеме транспортного средства и кинемати5
ческик входному валу понижающего редуктора 26. Выходная ведущая шестерня 27 редуктора кинематически соединена с ведомой шестерней 28, закрепленной
на валу 11, последний установлен, например, в подшипниках 29 скольжения, присоединенных к промежуточной опорной плите 30, которая закреплена на .юнжеронах рамы 2 транспортного средства. К нижней плоскости опорной плиты присоединен поддон
для ведомой шестерпи 28. Горизонтальный вал на концах имеет сменные втулки 31 выполнения в виде кинематического элемента «винт с наружной, например, трапе- цеида.чьной резьбой. Втулки 31 выполнены
5 взаимодействующими с гайками 32, жестко присоединенными к частям 18 рь 1чагов 10. Гайки 32 имеют внутреннюю резьбу, вынол- ненную аналогично резьбе втулок 31. На горизонтальном валу установлен нормально закрытый колодочный тормоз 33 с пружи0 ной растяжения и приводным гидроцилиндром 34. Корпус тормоза присоединен к опорной плите 30. Гидроцилиндр 34 тормоза сблокирован с гидрораснределптелем гидромотора 25. Эта блокировка предназначена для фиксации ва.та 1 1 поворотных рычагов 10 в заданном ноложении при отключенном гидромоторе 25. Для фиксации кинематических пар винт-гайка в рабочем положении (при максимальном раздвижении рычагов 10) предусмотрены гидравлические
л фиксаторы 35, плунжеры которых через промежуточные выдвижные элементы 36 механически связывают кинематические пары винт-гайки от взаимного проворачивания при под ьеме и опрокидывании контейнеров 14 посредством отверстий 37, выполненных в гайках 32, и пазов 38, выполненных в ограничителях 39.
В загрузочном устройстве предусмотрен механизм фиксации крышек 16 контейнеров, который выполнен в виде упора 40 со скосом 41, соединенного с гидроцилиндром 42.
0 Корпус г идроцилиндра 42 шарнирно присоединен к кронштейну 43 неподвижного зуба 12, а шток - через направляющую 44 к торцу упора 40.
Неремешение рычагов 10 в поперечной плоскости синхронизировано с работой приводного гидроцилиндра 22 раздвижной балки. Это достигается за счет ввода в гид- ро 1ривод дросселей, установленных на входах гидроцилиндра 22 и гидромотора 25. Гидродвигатель, колодочный тормоз и гидроQ цилиндры загрузочного устройства подключены к гидросистеме транспортного средства 1, управление которыми осуществляется из кабины водителя. Кроме того, может быть предусмотрен выносной пульт управления.
5
5
55
Мусоровоз работает следующим образом.
При движении мусо5ювоза по маршруту
вилка находится в транспортном положении
(фиг. 1) над загрузочным отверстием 4, при этом штоки гидроцилиндров 15, 19, 22, 24 и 34 и плунжеры фиксаторов 35 втянуты в их корпуса, гидромотор 25 отключен, рычаги 10 загрузочною устройства 6 расположены на минимально возможном расстоянии один от другого, зубья 12 и 13 вилки также расположены на минимально возможном расстоянии друг от друга.
Для захвата на контейнерной площадке большегрузного контейнера 14 водитель подводит к нему мусоровоз на расстояние, примерно равное максимальной длине поворотных рычагов 10 с учетом их наклона к поверхности контейнерной плош,ади, включает гидроцилиндры 19 и части 17 и 18 поворотных рычагов раздвигаются до предельного положения. После этого водитель включает гидромотор 25, гидроцилиндр 22 раздвижной балки и гидравлические фиксаторы 35 с выдвижными элементами 36. При включении гидромотора 25 осуш.ествля- ется растормаживание вала 11 от колодок тормоза 33. Гидромотор обеспечивает через редуктор 26 и ведомую шестерню 28 вращение вала 11, при этом рычаги 10 раздвигаются, а гайки 32 свинчиваются с втулок 31 до предельного положения. В крайнем предельном положении гаек плунжеры фиксаторов 35 перемешают выдвижные элементы 36, которые вдвигаются в отверстия 37 гаек и пазы 38 ограничителей 39, а гидроцилиндр 22 раздвижной балки становится на гидрозамок, при этом обеспечивается жесткая фиксация рычагов 10 с валом 11. При срабатывании фиксаторов 35, выдвижных элементов 36 и гидрозамка гидроцилиндра 22 рычаги 10 поворачиваются в направлении контейнера 14 до соприкосновения частей 17 рычагов с поверхностью контейнерной плошадки.
После этого гидроцилиндром 15 и гидроцилиндром 24 поворачиваются зубья 12 и 13 и устанавливается между ними ширина, необходимая для захвата контейнера 14. После захвата контейнера реверсируют привод загрузочного устройства. При врашении выходного вала гидромотора в противоположную сторону рычаги 10 поднимают контейнер (фиг. 2). В положении для его разгрузки отключают гидромотор, при этом осуществляется торможение вала 1Г тормозом 33, затем подают рабочую жидкость под давлением в што- ковые полости гидроцилиндров 19 и опускают контейнер на минимально возможное расстояние от загрузочного отверстия 4. Водитель включает гидроцилиндр 42 механизма фиксации крышки 16 контейнера. Упор 40 механизма освобождает крышку, которая открывается под действием массы мусора. После этого мусор гтерегружается из контейнера в кузов 3 мусоровоза и контей0
5
0
5
0
5
0
5
0
5
нер возвращается на контейнерную пло- шадку, при этом элементы загрузочного устройства 6 работают в обратной последовательности. Одновременно с возврашением контейнера на контейнерную площадку уп- лотнительной плитой 9 перемещают мусор к заднему борту 7. Для загрузки мусора в кузов 3 из второго контейнера, стоящего рядом с первым, водитель аналогичными приемами подводит мусоровоз к второму контейнеру. Загрузка мусора в кузов 3 из второго контейнера осуществляется аналогично. После заполнения кузова 3 мусором его транспортируют к местам утилизации или выгрузки. По прибытии мусоровоза, например, к местам выгрузки открывают задний борт 7 и поворачивают зубья 12 и 13 вилки гидроцилиндром 15 в вертикальное положение, затем опрокидывают кузов 3, выгружая из него мусор.
Формула изобретения
1.Мусоровоз, включающий смонтированный на транспортном средстве кузов с загрузочным отверстием в передней части его крыши и уплотнительной плитой и установленное в передней части рамы транспортного средства загрузочное устройство, выполненное в виде двух консольных рычагов, закрепленных на горизнтальном валу привода, к которым присоединена поворотная вилка для захвата большегрузных контейнеров, имеющих крышки, снабженные механизмом фиксации, отличающийся тем, что, с целью расширения его функциональных возможностей путем обеспечения загрузки контейнеров различной ширины при одновременном повышении надежности в работе, свободные концы консольных рычагов снабжены связывающей их раздвижной балкой, состоящей из подвижной и неподвижной частей, на последней из которых установлена поворотная вилка, при этом горизонтальный вал выполнен с тормозом и его концы снабжены соосными с ними винтовыми передачами с гайками, прикрепленными к консольным рычагом и выполненными с фиксаторами для последних.
2.Мусоровоз по п. 1, отличающийся тем, что подвижная часть раздвижной балки выполнена с приводом в виде имеющего гидрозамок гидроцилиндра.
3.Мусоровоз по п. 1, отличающийся тем, что привод горизонтального вала выполнен из закрепленной на нем ведомой шестерни, зацепленной с ведущей шестерней редуктора гидромотора, подключенного через гидрораспределитель к гидросистеме транспортного средства.
4.Мусоровоз по п. 1, отличающийся тем, что механизм фиксации крышки контейнеров выполнен в виде упора со скосом, соединенного через направляющую со штоком гидроцилиндра, шарнирно закрплен- ного на кронштейне подвижной части поворотной вилки.
5
5. Мусоровоз по пп. 1 и 3, отличающийся тем, что тормоз горизонтального вала выполнен колодочным с приводом от гидроцилиндра, сблокированного с гидрораспределителем гидромотора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мусоровоз | 1986 |
|
SU1395565A1 |
| Мусоровоз | 1985 |
|
SU1247316A1 |
| Устройство для загрузки мусоровозов | 1983 |
|
SU1108053A1 |
| Мусоровоз | 1981 |
|
SU971732A1 |
| Мусоровоз | 1984 |
|
SU1206203A1 |
| Мусоровоз | 1982 |
|
SU1036626A1 |
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Мусоровоз | 1987 |
|
SU1482868A1 |
| Установка для мойки внутренней поверхности мусорных контейнеров | 1989 |
|
SU1664427A1 |
| Контейнеровоз | 1984 |
|
SU1230887A1 |
Изобретение относится к коммунальному мапшностроению. Цель изобретения - расширение функциональных возможностей мусоровоза путем обеспечения загрузки контейнеров различной ширины при одновременном повышении надежности в работе. Мусоровоз включает кузов и установленное в передней части рамы загрузочное устройство. Для захвата большегрузного контейнера при помощи гидроцилиндров 19 раздвигаются части 17 и 18 поворотных рычагов 10 загрузочного устройства и включается гидромотор 25 и гидроцилнндр 22 раздвижной балки. В результате осуществляется растормаживание вала 11 от колодок тормоза 33 и его вращение, обеспечи- ваюп1ее поперечпое раздвижени поворотных рычагов за счет их связи с концами ва ла посредством винтовых передач и фиксацию последних с ними. При дальней нем совместном повороте рычагов 10 и вала II происходит опускание загрузочного устройства к контейнеру. Захват контейнера осуществляется зубьями 12 и 13 вилки, шар- нирно закрепленной на неподвижной части 21 раздвижной балки. Реверсом гидромотор поворачивается кверху для разгрузки в кузов мусоровоза. 4 з.п. ф-лы, 7 ил. SS л 3 22 20 7713 10 J5 183B3S / 28 Ч 5 оо оо 4 4: 12 2J 21 19 35 - 26 25 Фиг.З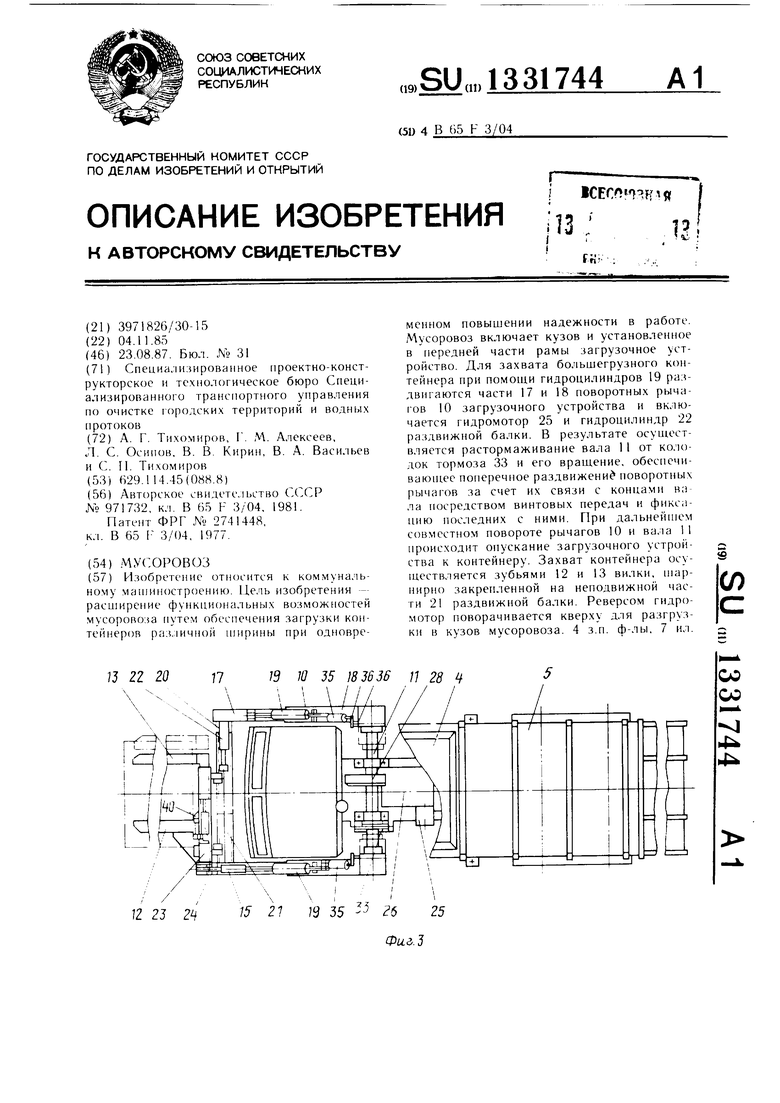
Фиг.1
W
Щ
16
Риг5
W
М
Г Г повернуто
| Мусоровоз | 1981 |
|
SU971732A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| ТОРМОЗНАЯ СИСТЕМА ДЛЯ АВТОМОБИЛЯ И СПОСОБ РАБОТЫ ТОРМОЗНОЙ СИСТЕМЫ | 2018 |
|
RU2741448C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
