со
00 О5 СЛ
Изобретение относится к транспортному машиностроению, а именно к транспортным средствам с погрузочно-разгрузочными устройствами для сменных грузовых платформ, емкостей и контейнеров.
Цель изобретения - расширение эксплуатационных возможностей путем повышения надежности при проведении погрузочно-раз- грузочных операций на различных по высоте уровнях.
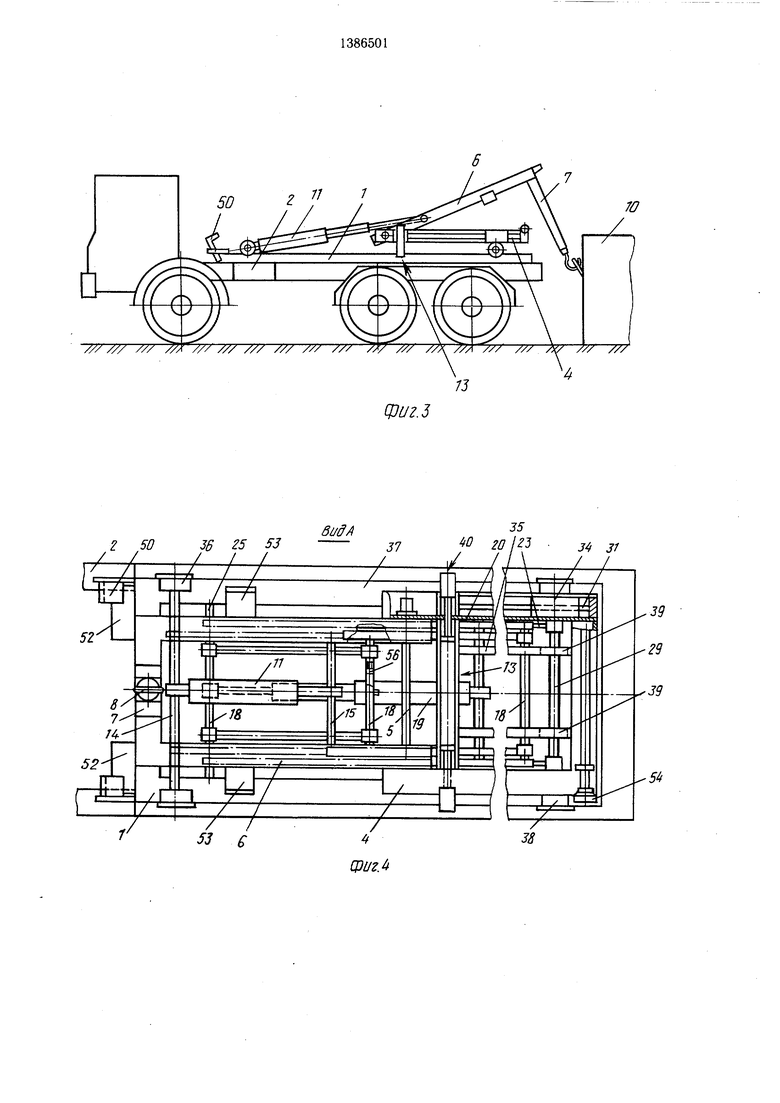
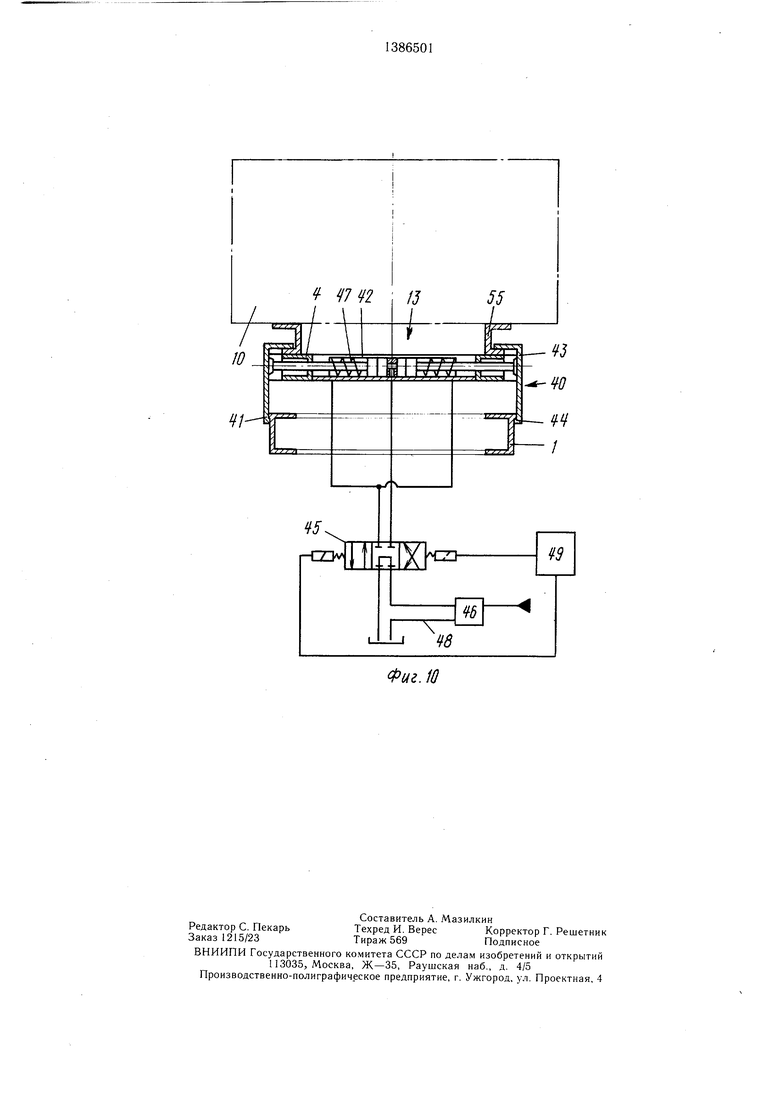
На фиг. 1 схематически изображено устройство для подъема сменной грузонесущей емкости, платформы или контейнера в транспортном положении, общий вид; на фиг. 2 - то же, в конце разгрузки; на фиг. 3 - то же, после разгрузки; на фиг. 4 - вид А на фиг. 1; на фиг. 5 - устройство в начальный период подъема сменной грузонесущей емкости, платформы или контейнера; на фиг. 6 - механизм подъема; на фиг. 7 - устройство другой модификаии перед разгрузкой в перегрузочную емкость; на фиг. 8 - то же, начальный период разгрузки в перегрузочную емкость; на фиг. 9 - то же, разгрузка материалов в кузов мусоровоза; на фиг. 10 - гидравлическая схема управления блокирующим механизмом.
Устройство для подъема сменной грузонесущей емкости, платформы или контейнера содержит связанную с задним концом надрамника 1 рамы 2 транспортного средства с возможностью поворота в продольной вертикальной плоскости относительно поперечной горизонтальной оси 3 хвостовую раму 4, прикрепленную к хвостовой раме посредством поперечной горизонтальной оси 5 одним из своих концов среднюю раму 6 с поворотным приводным рычагом 7, имеющим захватный крюк 8, взаимодействующий с элементом 9 зацепления сменной грузонесущей емкости, платформы или контейнера 10, гидроцилиндр 11 поворота средней рамы 6, механизм 12 подъема средней 6 и хвостовой 4 рам и блокирующий механизм 13.
Надрамник 1 жестко прикреплен к раме 2 и выполнен из элементов коробчатой конструкции, например из двухтавровых балок. Хвостовая 4 и средняя 6 рамы выполнены также из элементов коробчатой конструкции. Поворотный приводной рычаг 7, например, прямоугольного сечения жестко прикреплен к переднему концу средней рамы 6, гидроцилиндр 11 поворота средней рамы 6 выполнен телескопическим, корпус которого щар- нирно присоединен к механизму 12 подъема средней 6 и хвостовой 5 рам. Блокирующий механизм 13 закреплен на хвостовой/ раме 4, гидроцилиндр 11 корпусом соединен с поперечной горизонтальной осью 14, а выходным штоком - с осью 15, размещенной в пазах 16 средней рамы 6. В пазах 16 установлены пружины 17 демпфирования для исключения резких толчков при повороте в продольной вертикальной плоскости средней рамы 6 с поворотным приводным рычагом 7.
Устройство содержит связанные между со бой механизмы 12 подъема средней и хвостовой рам 6 и 4, каждый механизм 12 подъема средней и хвостовой рам, на которых
расположена сменная грузонесущая емкость, платформа или контейнер 10, включает в себя горизонтальные оси 18, гидроцилиндр 19 перемещения первого рычага 20, двуплечий рычаг 21, третий рычаг 22, выдвижной стержень 23.
Рычаги 20 и выдвижные стержни 23 выполнены из труб. Внутри каждого первого рычага 20 установлен привод 24, выполненный из гидроцилиндра. Нижние концы первых рычагов 20 щарнирно присоединены к
5 поперечн ой горизонтальной оси 25 каретки 26 с возможностью горизонтального перемещения по основным направляющим 27 надрамника 1, верхние концы выдвижных стержней 23 первых рычагов 20 через серьги 28 щарнирно присоединены к поперечной гори0 зонтальной оси 29 каретки 30 с возможностью перемещения по продольным направляющим 31 хвостовой рамы 4, причем каретка 26 выполнена в виде корпуса 32, снабженного роликами 33, а каретка 30 - в
5 виде ползунов 34, при этом нижние концы двуплечих рычагов 21 шарнирно присоединены к задней части надрамника 1. Кинематическая связь ползунов 34 с осью 29 (не показана) может быть выполнена в виде двух вертикально расположенных кронштей0 нов, которые верхними частями жестко закреплены на нижней плоскости ползунов 34, а нижними частями щарнирно закреплены на оси 29. Кронщтейны пропущены через пазы хвостовой рамы 4.
5 На поперечной горизонтальной оси 14, установленной на свободных верхних звеньях вторых рычагов 35, длина которых не пре- выщает три четверти длины двуплечих рычагов 21, смонтированы ролики 36, взаимо,, действующие с дополнительными направляющими 37 надрамника 1 и нижней плоскостью средней рамы 6, причем в конструкции роликов 36 предусмотрены реборды. Длина звеньев вторых рычагов 35, равная трем четвертям длины двуплечих рыча5 гов 21, обеспечивает горизонтальное положение хвостовой 4 и средней 6 рам при подъеме сменной грузонесущей емкости платформы или контейнера 10.
Каретка 30 также снабжена дополнительными роликами 38, идентичными роли0 ками 36, установленными на поперечной горизонтальной оси 29 и взаимодействующими с дополнительными направляющими 37 надрамника 1 рамы транспортного средства и дополнительными направляющими 39 хвостовой рамы 4, при этом ролики 38 снабже ны ребордами.
Блокирующий механизм 13 закреплен на хвостовой раме 4 и состоит из захватов 40, взаимодействующих со сменной грузонесущей емкостью, платформой или контейнером 10 и выступами 41 надрамника 1, и гидроцилиндра 42 двустороннего действия, причем захваты 40 имеют разной длины зацепы 43 и 44. Зацепы 43 в 3-5 раз длиннее зацепов 44. Управление блокирующим механизмом осуществляется гидрораспределителем 45, в напорной магистрали которого установлен предохранительный клапан 46, а в штоковых полостях гидроцилиндра 42 расположены тарированные пружины 47, при этом предохранительный клапан 46 снабжен устройством ручного управления и дополнительной сливной магистралью 48 рабочей жидкости при превышении заданного давления в напорной магистрали. Гидрораспределитель 45 электрически связан с блоком 49 управления.
Кроме того, устройство снабжено двумя дополнительными подпружиненными захватами 50, установленными в передней части надрамника 1 и взаимодействующими через толкатели 51 с осью 25 каретки 26 и выступами 52, смонтированными на передней части средней рамы 6.
Дополнительные подпружиненные захваты 50 предназначены для фиксации средней рамы 6 в транспортном положении. На средней раме 6 смонтированы упоры 53, а в задней части хвостовой рамы 4 - ролики 54, которые взаимодействуют с опорными балками 55 сменной грузонесущей емкости, платформы или контейнера 10 при осуществлении погрузоч но-разгрузочных операций.
Механизмы 12 подъема средней и хвостовой рам сменной грузонесущей емкости платформы или контейнера 10 по другой модификации (фиг . 4, 7 и 8) имеют свободные верхние звенья вторых рычагов 35, выполненные составными из труб разной длины с фиксаторами 56, например гидравлическими, причем общая наименьшая длина упомянутых труб выполнена равной трем четвертям длины двуплечих рычагов 21.
Такое исполнение звеньев вторых рычагов 35 расширяет эксплуатационные возможности устройства при разгрузке материалов, например, в перегрузочную емкость 57 или кузов 58 собирающего мусоровоза.
Устройство для подъема сменной грузонесущей емкости, платформы или контейнера работает следующим образом.
В транспортном положении сменная гру- зонесущая емкость, платформа или контейнер 10 (фиг. 1) размещена на опорах 53 и роликах 54. Захватный крюк 8 поворотного приводного рычага взаимодействует с элементом 9 зацепления сменной грузонесущей емкости, платформы или контейнера 10, внешние кромки опорных балок 55 которого заблокированы блокирующим механизмом 13. Механизмы 12 подъема средней и хвостовой рам сложены, при этом ролики 36
взаимодействуют с дополнительными направляющими 37 надрамника 1 и нижней плоскостью средней рамы 6, а ролики 38 - соответственно с дополнительными направляю- щими 37 надрамника 1 и дополнительными направляющими 39 хвостовой рамы 4, причем средняя рама 6 заблокирована дополнительными подпружиненными захватами 50, а блокирующий механизм 13 дополнительно взаимодействует с выступами 41 надрамни
ка 1.
Таким образом, устройство для подъема сменной грузонесущей емкости, платформы или контейнера надежно -закреплено на транспортном средстве. Для разгрузки сменной грузонесущей емкости, платформы или контейнера 10 с пу.тьта управления, размещенного в кабине водителя, подают управляющий сигнал на переключение гидрораспределителя 45, который, переключившись, подает рабочую жидкость под давлением в
поршневые полости гидроцилиндра 42. Заце- -пы 44 захватов 40 блокирующего механизма 13 выходят из зацепления с выступами 41 надрамника 1. Так как в штоковых полостях гидроцилиндра 42 установлены
5 тарированные пружины 47, то в его поршневых полостях возрастает давление и срабатывает предохранительный клапан 46, при этом рабочая жидкость сливается в гидро- бак, а на пульте управления включается сигнальная лампа, сигнализирующая расцеп0 ление надрамника 1 с хвостовой рамой 4.
После этого включают гидроцилиндр 19, втягивая его выходной шток на величину, равную ходу дополнительных подпружинен- Hbix захватов 50, которые под действием
5 пружин расцепляются с выступами 52 средней рамы 6, причем ход захватов 50 выбирают минимальным.
Далее предохранительный клапан 46 переключают на ручное управление, прекраQ щая автоматический слив рабочей жидкости в гидробак, и подают рабочую жидкость в поршневые полости гидроцилиндра 42. В поршневых полостях гидроцилиндра 42 возрастает давление рабочей жидкости, которое преодолевает усилие тарирован5 нь1х пружин 47, при этом зацепы 43 захватов 40 выходят из зацеплений с опорны- М1 балками 55 сменной грузонесущей емкости, платформы или контейнера 10. После разблокировки хвостовой рамы 4 со сменной грузонесущей емкостью, платформой или
0 контейнером 10 включают гидроцилиндр 11 поворота средней рамы 6, при выдвижении штока которого средняя рама 6 совместно с поворотным приводным рычагом 7 сдвигает сменную грузонесущую емкость, платформу или контейнер 10 назад.
Опорные балки 55 сменной грузонесущей емкости, платформы или контейнера 10 скользят по роликам 54, как показано на фиг. 2. При дальнейшем выдвижении штоков гидроцилиндра 11 разгружают сменную грузонесущую емкость, платформу или контейнер 10 на землю, как показано на фиг. 3, затем освобождают захватный крюк 8 поворотного приводного рычага 7 от элемен- та 9 зацепления сменной грузонесущей емкости, платформы или контейнера 10, для этого перемещают транспортное средство вперед.
Погрузку сменной грузонесущей емкости, платформы или контейнера 10 осуществляют в обратной последовательности, как показано на фиг. 3-1.
В случае необходимости опрокидывания и самосвальной разгрузки сменной грузонесущей емкости, платформы или контейне- ра 10 на заданной высоте, например, в перегрузочную емкость 57 или кузов 58 собирающего мусоровоза осуществляют расцепление средней рамы б от надрамника 1, а надрамник 1 - от зацепов 44 блокирующего механизма 13 ранее описанными прие- мами. После этого одновременно втягивают щток гидроцилиндра 19 в его корпус и выдвигают соответственно щток из корпуса гидроцилиндра 11, а выдвижные стержни 23 - из первых рычагов 20 посредством приводов 24.
Под действием упомянутых гидроцилиндров каретки 26 и 30 перемещаются вправо, а сменная грузонесущая емкость, платформа или контейнер 10 поднимаются, перемещаясь назад, на заданную высоту, как показано на фиг. 5-7. При достижении сменной грузонесущей емкостью платформой или контейнером 10 заданной высоты подъема переключают гидрораспределитель привода 24 из гидроцилиндров на втягивание их щтоков в корпуса, при этом выдвижные стержни 23 первых рычагов 20 вдвигаются, а сменная грузонесущая емкость, платформа или контейнер 10 наклоняются на заданный угол благодаря перемещению каретки 30 влево, как показано на фиг. 8 и 9. Под действием собственного веса, например, твер- дые бытовые отходы выгружаются в перегрузочную емкость 57 или в кузов 58 мусоровоза, затем устройство для подъема смен- ной грузонесущей емкости, платформы или контейнера 10 переводят в обратной последо- вательности в транспортное положение.
В случае необходимости подъема передней части сменной грузонесущей емкости, платформы или контейнера 10 на дополнительную высоту подъема для облегчения разгрузки материалов выключают гидравли- ческий фиксатор 56 и включают гидроцилиндр 11 поворота средней рамы 6 при использовании устройства по другой модификации, при этом выходной шток гидроци- линдар 11, выдвигаясь из его корпуса, обеспечивает раздвигание звеньев вторых рыча- гов 35; что увеличивает скорость выгрузки материалов. После разгрузки материалов из сменной грузонесущей емкости, платформы
или контейнера 10 механизм 12 подъема средней и хвостовой рам переводят в обратной последовательности в транспортное положение.
Формула изобретения
1.Устройство для подъема сменной грузонесущей емкости транспортного средства, содержащее хвостовую раму с захватами для емкости и смонтированными на одном ее конце роликами для взаимодействия с грузонесущей емкостью, другим концом взаимно связанную с возможностью поворота в продольной вертикальной плоскости с одним концом средней рамы, на другом конце которой смонтирован поворотный в указанной плоскости приводной рычаг с захватным крюком для взаимодействия с петлей сменной грузонесущей емкости, механизм подъема средней и хвостовой рам, включающий в себя первый рь1чаг, щарнирно закрепленный одним концом в передней части надрамника транспортного средства, другим концом щарнирно связанный с хвостовой рамой, второй рычаг, одним концом закрепленный с возможностью поворота в указанной плоскости на первом рычаге, а на другом его конце смонтированы первые дополнительные ролики, взаимодействующие со средней рамой, гидроцилиндр перемещения первого рычага и гидроцилиндр поворота средней рамы, смонтированный на втором рычаге, отличающееся тем, что, с целью расщирения эксплуатационных возможностей путем повыщения надежности при проведении погрузочно-разгру- зочных операций на различных по высоте уровнях, механизм подъема средней и хвостовой рам снабжен двуплечим рычагом, щарнирно соединенным одним плечом с задним концом надрамника с возможностью поворота в указанной плоскости, средней частью щарнирно связанным со средней частью первого рычага, а другим плечом - с третьим рычагом, щарнирно соединенным с вторым рычагом, при этом первый рычаг снабжен выдвижным стержнем в другом его конце, а его связь с хвостовой рамой включает в себя ползун, щарнирно связанный со стержнем и установленный в продольных направляющих хвостовой рамы, при этом гидроцилиндр поворота средней рамы щарнирно связан с ней, а щарнир на одном конце первого рычага смонтирован на каретке, установленной с возможностью продольного перемещения в направляющих, которые выполнены в надрамнике.
2.Устройство по п. 1, отличающееся тем, что корпус гидроцилиндра для перемещения первого рычага щарнирно закреплен на раме транспортного средства, а щток - на оси щарнира на одном конце первого рычага.
3.Устройство по п. 1, отличающееся тем, что на надрамнике выполнены дополнительные направляющие для взаимодействия с первыми дополнительными роликами, закрепленными на других концах вторых рычагов, а ползун снабжен вторыми дополнительными роликами, взаимодействующими с дополнительными направляющими надрам- ника и дополнительными продольными направляющими хвостовой рамы, смонтированными на ее нижней плоскости.
4. Устройство по п. 1, отличающееся тем, что захваты механизма фиксации съемной
8
10
емкости выполнены с зацепами разной длины, взаимодействующими длинными частями с емкостью, а короткими - с выступами над- рамника в транспортном положении.
5. Устройство по п. 1, отличающееся тем, что оно снабжено дополнительными подпружиненными захватами, смонтированными на надрамнике и взаимодействующими через толкатели с осью у каретки и передни частью средней рамы в транспортном положении.
6 55
/ /
/
ф//./
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство со съемным контейнером | 1986 |
|
SU1382691A1 |
| Транспортное средство со сменным контейнером | 1986 |
|
SU1397329A1 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Транспортное средство со сменным контейнером | 1986 |
|
SU1402460A1 |
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ И ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078934C1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Мусоровоз | 1985 |
|
SU1265099A1 |
| Транспортное средство со сменным контейнером | 1988 |
|
SU1630930A1 |



Изобретение относится к области транспортного машиностроения, а именно к транспортным средствам с погрузочно-разгрузоч- ными устройствами для сменных грузовых емкостей и контейнеров. Цель изобретения - расширение эксплуатационных возможностей путем повышения надежности при проведении погрузочно-разгрузочных операций на различных по высоте уровнях.. Устройство для подъема сменной грузонесуш,ей емкости, платформы или контейнера 10 содержит среднюю раму 6, хвостовую раму 4. На средней части установлен поворотный приводной рычаг 7 с захватным крюком 9. Устройство снабжено механизмом подъема 12 средней и хвостовой рам, на которых размещена сменная грузонесущая емкость, платформа или контейнер 10, и обеспечивает ее съем на землю и подъем на различные уровни при погрузочно-разгрузочных операциях, а также самосвальную выгрузку в перегрузочную емкость 57. 4 з.п.ф-лы, 10 ил. S (Л
Х/У /// /ТУ /// 777 /77 777 /Y7
7// ///
(риг. 2
г 5036 25 53
51/дА
фиг. 2
35
37 го 12 34 31 // / / /
5
7/
52
Ли
f/3 31 за f /// / /
/5«
Ю
57
q3U2.8
70
58
Фиг. iO
| Подъемное устройство транспортного средства | 1982 |
|
SU1167062A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
