(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ nAPAJ ETPOB ДИНАМИЧЕСКИХ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ
f
Изобретение относится к автсяиатическому регулированию и может быть использовано при исследованиях и наладке систем автоматического регулирования.
Известно устройство для определения характеристик систем управления, содержащее генератор сигналов, подключенный к усилителям, фильтры, блок умножения, фазосдвигающий-блок и 0 индикаторы
Наиболее близким по технической сущности является устройство для измерения параметров динамических звеньев систем управления, содержа- 15 щее последовательно соединенные первый интегратор, второй интегратор, .первый блок деления напряжения и первый измерительный блок, а также последовательно соединенные первый 20 блок масштабирования, второй блок масштабирования, второй блок деления напряжения и второй измерительный блок, причем первый вход первого интегратора соединен с входом исследуе-25 мого динамического звена, а второй вход - с выходом первого блока масштабирования и вторыми входами первого и второго блоков деления напряжения, а второй вход второго интегра- 30
тора подключен к выходу второго блока масштабирования 2.
Недостаток этого устройства заключается в том, что оно позволяет измерять только парс1метры инерционных звеньев первого и второго порядков.
Целью изобретения является измерение параметров динамических звеньев, имеющих пеоедаточную (1)ункцию вида:
ь,Р
т.е. расширение функциональных возможностей.
Поставленная цель достигается тем, что устройство содержит последовательно соединенные третий интегратор, третий блок деления напряжения и третий измерительный блок, причем вход третьего интегратора соединен с выходом исследуемого динамического звена, а выход - с входом первого блока масштабирования, выход которого подсоединен к второму входу третьего блока деления напряжения.
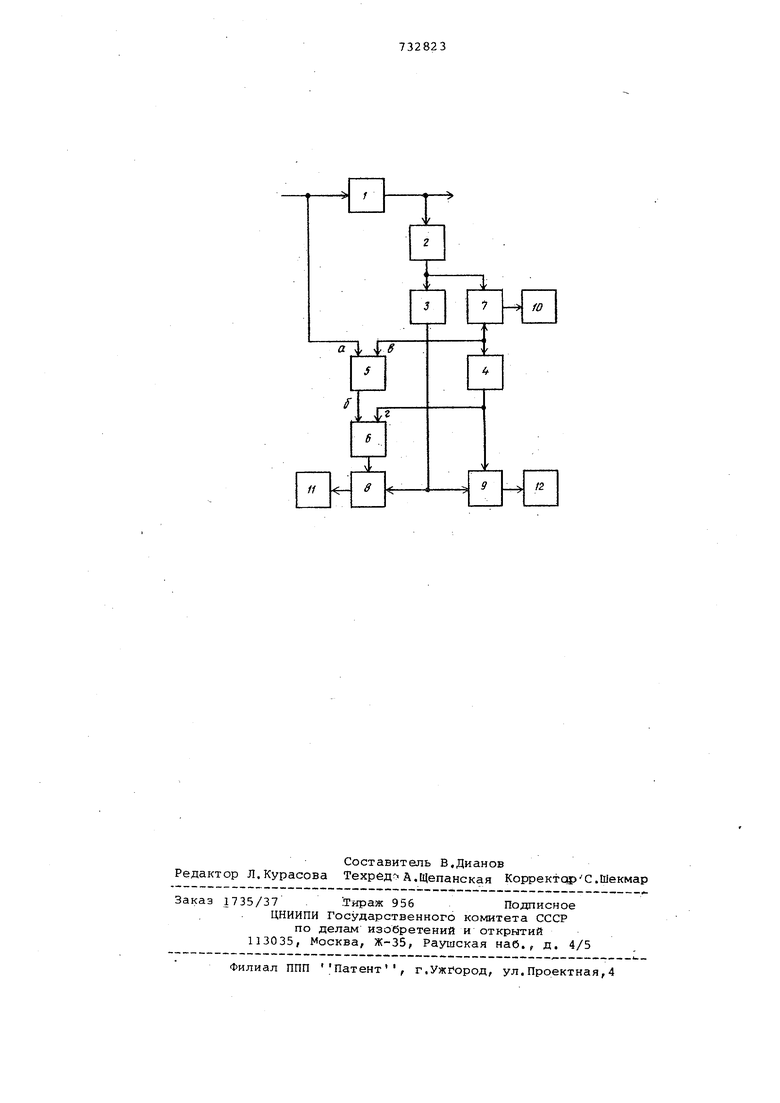
На чертеже изображена структурная устройства,
Она содержит исследуемое динамическое .звено 1, третий интегратор 2, первый 3 и второй 4 блоки масштабиро вания, первый 5 и второй 6 интеграторы, третий 7, первый 8 и второй 9 блоки делания напряжения и третий 10 Первый 11 и второй 12 измерительные .блоки. . Устройство работает следующим образом. Сигнал, снимаемый с выхода звена 1, подается на вход интегратора 2, выходной сигнал которого поступает на вход блока 7 и на аход блока 3. На вход блока 7 подается сигнал с выхода блока 3. Сигнал на выходе блока 7 соответствует величине коэффициента Ь передаточной функции исследуемого звена. Блок 10 регистрирует выходной сигнал блока 7. На входы интегратора 5 с противоположными знаками подаются сигналы. Кроме того, сигнал с выхода блока 3 через блок 4 поступает на один из входов интегратора 6 и на вход делимого бло ка 9, На второй вход интегратора 6 с противоположным знаком подается сигнал с выхода интегратора 5. Выходной Сигнал интегратора б подается на вхо делимого блока 8, Входы делителя бло ков 8 И 9 соединены с выходом блока При этом.выходной сигнал блока 8 соо ветствует величине коэффициента ад, а сигнал на выходе блока 9 - величин коэффици€ нта а. Блоки 11 и 12 регистпируют выходные сигналы блоков и 9, соответственно. Процесс измерения состоит из дву операций: первая - установка коэффи циентов передачи интеграторов 5 и 6 и коэффициентов усиления блоков 3 и 4;вторая - непосредственное измерени цараметров звена. Установка коэффициентов осуществляется следующим образом. В устсшовившемся режиме, изменяя коэффициент передачи интегратора 5 по входу а, добиваются максимального напряжения на выходе интегратора 5 (в режиме: установки коэффициентов интеграторы 5 и 6 первоначально работают в масштабном режиме. Затем, изменяя коэффициент усиления блока устанавливают нулевой уровень сигна ла на Выходе блока 5, после чего, переведя интегратор 5 в режим интег рирования и возвратив схему в исходное состояние, необходимо подать на вход эвена Г скачкообразный сигн и в Установившемся режиме, изменя.я коэффициент передачи интегратора 6 по входу б, устанавливается максимальное напряжение на выходе блока Затем/ меняя усиление блока 4, доби ваются нулевого уровня сигнала на выходе интегратора 6. После этих операций устройство откалйбровано и, переведя интегратор 6 в режим интегрирования, можно приступать к определению параметров исследуемого звена. Для этого необходимо, подавая скачкообразный сигнал на вход звена 1, с помощью блоков 10-12 производить измерение определяемых параметров исследуемого динамического звена. Описанное устройство дает возможность измерять- параметры динамических звеньев, имеющих передаточную функцию указанного выше вида, что принципиально отличает предлагаемое устройство от известных ранее. Формула изобретения Устройство для измерения параметров динамических звеньев систем управления, содержащее поел ;доват ель - НО соединенные первый интегратор, второй интегратор, первый блок деления напряжения и первый измерительный блок, а также последовательно соединенные первый блок масштабирования, второй блок масштабирования, второй блок деления напряжения и второй измерительный блок, ппичем первый вход первого и-нтегратора соединен с входом исследуемого динамического звена, а второй вход - с выходом, первого блока масштабирования и вторыми входами первого и второго блоков деления напряжения, а второй вход второго интегратора подключен к выходу второго блока масштабирования, отличающее с я тем, что, с целью расширения функциональных возможностей устройства, оно содержит последовательно соединенные третий интегратор, третий блок деления напряжения и третий измерительный блок, причем вход третьего интегратора соединен с выходом исследуемого динамического звена, а выход - с входом первого блока масштабирования, выход которого подсоединен к второму входу третьего блока деления напряжения. Источники информации, принятые во внимание ггои экспертизе 1.Авторское свидетельство СССР 443366, кл, G 05 В 23/02, 1971, 2,Авторское свидетельство СССР по заявке 2419394/18-24, кл. G 05 В 23/02, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1986 |
|
SU1335940A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1981 |
|
SU1016773A1 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |