00 О) СП
со
1
lA
Изобретение относится к области автоматического управления .и может быть использовано при исследованиях и наладке систем автоматического управления .
Цель, изобретения - повышение точности измерения параметров
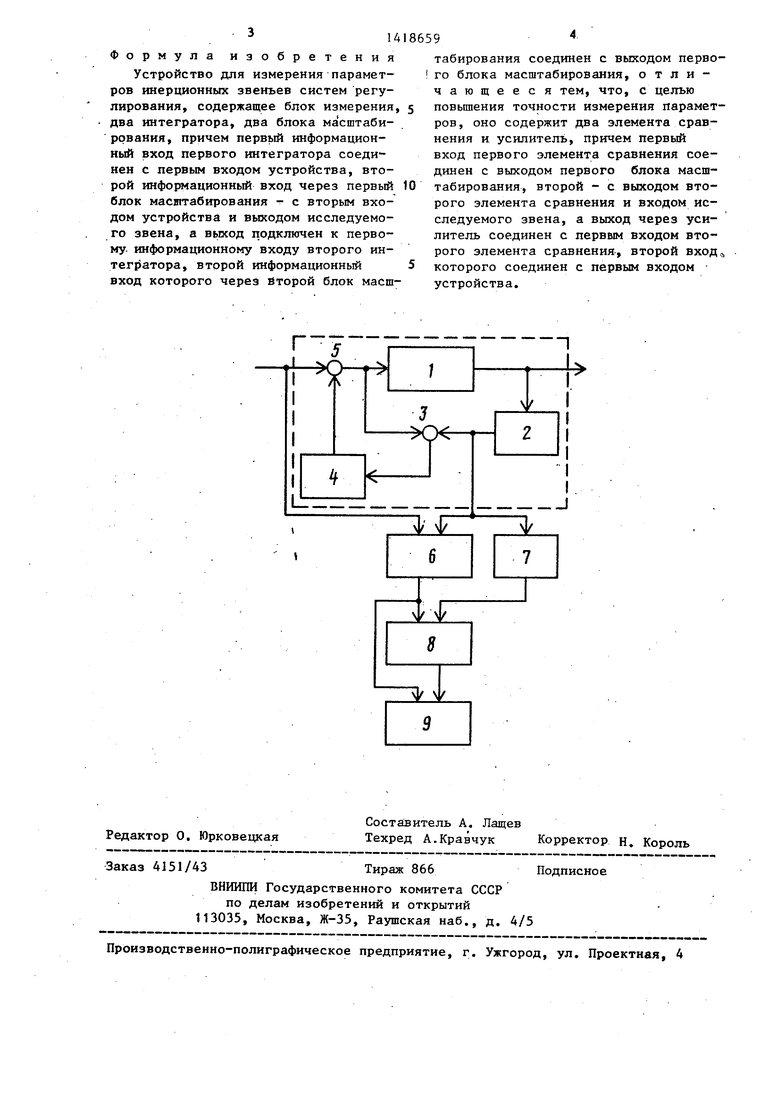
На чертеже изображена функциональная схема предлагаемого устройства.
Выход исследуемого звена 1 соединена с входом блока 2 масштабирования, выход которого подключен к первому входу элемента 3 сравнения, второй вход которого соединен с входом исследуемого звена Выход элемента 3 сравнения через усилитель 4 соединен с первьм входом элемента 5 сравнения, второй вход которого подключен к первому входу устройства, а вьпсод - к входу исследуемого звена 1 Первый вход интегратора 6 соединен с рервым входом устройства, второй. вход - с выходом блока 2 масштабирования и входом блока 7 масштабирования, выход которого подключен к первому входу интегратора 8, второй вход которого соединен с выходом интегратора 6 и одним из входов блока 9 измерения, другой вход которого подключен к выходу интегратора 8.
Блоки масштабирования и ш тегра- торы могут быть выполнены на интегральных операционных усилителяХо Причем интеграторы снабжаются переключателем, который позволяет им работать как в режиме интегрирования, так и в режиме усиления. Кроме того, все. интеграторы должны иметь кнопку сброса на нуль. Эта кнопка подключается параллельно емкости, которая находится в обратной связи операци™ онного усилителя.
Интеграторы должны иметь зону нечувствительности, которая необходима для повьш1ения стабильности измерений параметров. Это связано с тем, что практически невозможно точно установить равные напряжения по входам интеграторов с помощью блоков масштабирования, т.е всегда присутствует погрешность Следовательно, выходная величина интеграторов изменяется во времени.
Параметры исследуемого звена с передаточной функцией
W
(р) а ,р+1
(1)
92
искусственно увеличивают в (l+K) раз (К - коэффициент усиления усилителя 4). Это достигается схемным реше- нием, показанным на функциональной схеме {выделено пунктиром). В этом случае сигналы на выходе устройства, пропорциональные измеряемым коэффициентам характеристического уравнения, увеличиваются в (1 Ку) раз, и, следовательно, относительная погрешность измерения уменьшается.
Устройство работает следующим образом
На вход, элемента 5 сравнения подается единичный ступенчатый .сигнал. В установившемся режиме при отключенном усилителе 4, изменяя коэффициент передачи блока 2 масштабирования,
добиваются нулевого уровня сигнала на выходе элемента 3 сравнения (интеграторы 6 и 8 работают в режиме усиления ). В этом случае коэффициент передачи блока 2 масштабирования об
ратно пропорционален статическому
коэффициенту исследуемого звена К, т.е. . Затем, переводя интегратор 6 в режим интегрирования и вернув схему в исходное состояние, снова
0 подают единичный ступелчатый сигнал на вход элемента 5 сравнения. В установившемся режиме, меняя коэффициент передачи блока 7 масштабирования, добиваются нулевого уровня сигнала
5 на выходе интегратора 8, в этом случае он равен коэффициенту а., (). Переводя интегратор 8 в режим интегрирования и-вернув схему в исходное состояние (показания интегратора 6
0 сбрасьшают на нуль ), снова подают единичный ступенчатый сигнал.
В установившемся режиме на выходе интегратора б присутствует сигнал, с, пропорциональный коэффициенту а,(1+ + Ку), а на выходе интегратора 8 - a Cl+Кч;), которые измеряют с помощью измерительного блока 9. Затем показания измерительного блока 9 делят на (1+К() и подучают истинное значе- ние параметров исследуемого звена.
Таким образом, предлагаемое-устройство дает возможность увеличить коэффициенты характеристического уравнения исследуемого звена в (1 +Ку) раз, что приводит к уменьшению относительной ошибки измерения, т.е. к повьтшению точности измерения параметров.
. 1
Формула изобретения Устройство для измерения параметров инерционных звеньев систем регулирования, содержащее блок измерения, два интегратора, два блока масштабирования, причем первьгй информационный вход первого интегратора соеди - нен с первым входом устройства, второй информационный вход через первый блок масштабирования - с вторым входом устройства и выходом исследуемого звена, а вькод подключен к первому- информационному входу второго интегратора, второй информационный вход которого через Второй блок масш59
табирования соединен с выходом перво- го блока масштабирования, отличающееся тем, что, с целью
повьппения точности измерения параметров, оно содержит два элемента сравнения и усилитель, причем первый вход первого элемента сравнения соединен с выходом первого блока масштабирования, второй - с выходом второго элемента сравнения и входом исследуемого звена, а выход через усилитель соединен с перввм входом второго элемента сравнения, второй вход,, которого соединен с первым входом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров динамических звеньев систем управления | 1986 |
|
SU1335940A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1280579A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ ПРОИЗВОЛЬНОЙ ФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2034302C1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Адаптивный статический анализатор | 1985 |
|
SU1305730A1 |
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2156494C1 |
Изобретение относится к автоматическому управлению и может быть использовано при наладке систем управления. Цель изобретения - повышение относительной точности измерения параметров - достигается за счет искусственного увеличения коэффициентов характеристического уравнения исследуемоj o звена. Устройство для измерения параметров инерционных звеньев состоит из блока измерения, двух интеграторов, двух блоков масштабирования, двух элементов сравнения и усилителя. Первый вход первого элемента сравнения через первый блок масштабирования подключен к второму входу устройства, второй вход - к входу исследуемого звена, выход - через усилитель кодному из входов второго элемента сравнения, другой вход которого подключен к первому входу устройства, а выход - к входу исследуемого звена, Первый вход первого интегратора подключен к Выходу первого €лока масштабирования и к входу второго блока масштабирования, второй вход - к первому входу устройства, а выход - к первому входу второго интегратора, второй вход которого соединен с выходом второго блока масштабирования. Выходы интеграторов подключены к соответствующим входам измерительного блока, 1 ило . (Л
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
