(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ
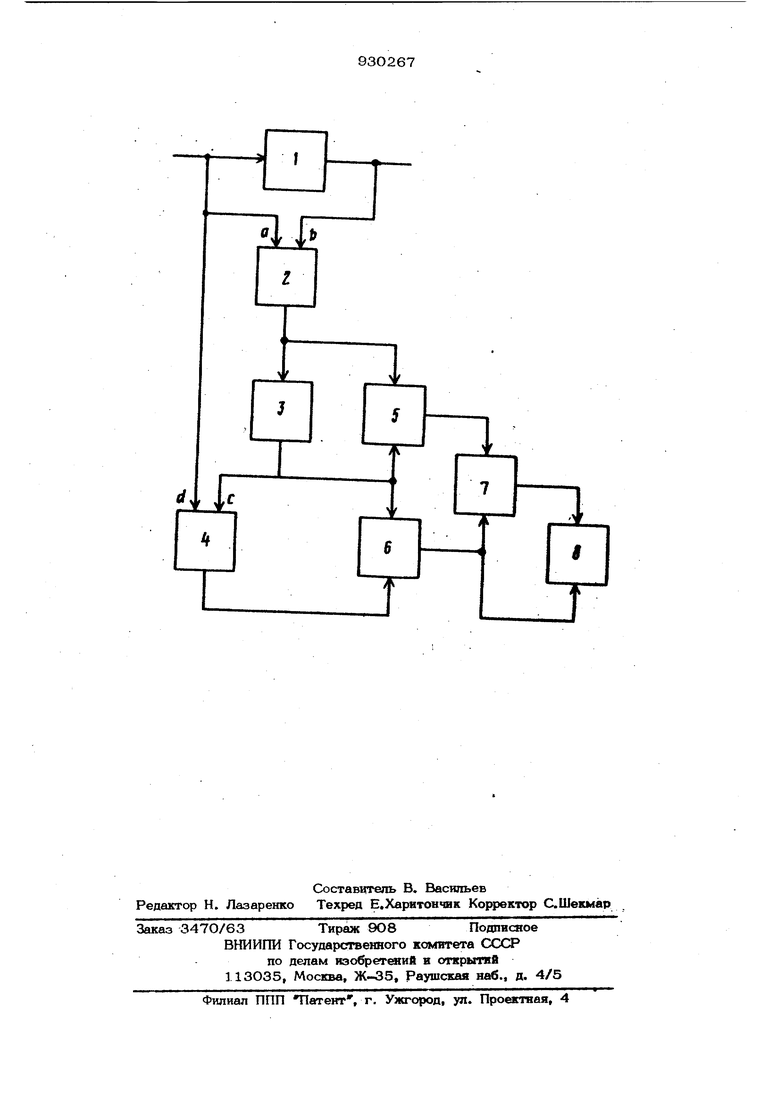
ДИНАМИЧЕСКИХ ЗВЕНЬЕВ СИСТЕМ РЕГУЛИРОВАНИЯ Изобретение относится. к автоматике я может быть использовано при исследо ваниях и наладке систем автоматическо го регулирования. Известно устройство для измерения параметров инерционных звеньев первог порядка, содержащее интегратор, входы которого связаны с входом и выходом исследуемого звена, а выход - с измер тельным блоком tl . Недостаток устройства состоит в том что с его помощью молсно измерять параметры только одного типа звеньев инерционных звейьев первого порядка, тогда как на практике весьма часто приходится иметь дело с интегродифференцнрующими звеньями с передаточной функцией . ,. W)KT;:PMо,..р4-. где К - сопи - постоянные времени. Наиболее близким по технической сущности к Изобретению является устройство для измерения параметров динамических звеньев систем регулирования, содержащее измерительный блок и первый интегратор, выходы которого соединены с входом и выходом исследуемого динамического звена Г2 . Недостаток устройства также состоит в ом, что им можно измерять параметры только инерционных звеньев. Цель изобретения - расщирение функциональных возможностей устройства. Эта цель достигается тем, что устройство содержит блок масштаб1фования, два блока деления, сумматор и второй интегратор, один вход которого подключен к входу исследуемого динамическо1о звена, второй вход - к выходу блока масштабирования и к первым входам блоков деления, выходы которых связаны с соответствующими входами сумматора, выход которого соединен с одним вхоло 1 измерительного блока, другой вход кс торого подключен к выходу первого блока деления, второй вход которого связан с иыходом второго интегратора, а выход первого интегратора подключен к входам блока масштабирования и второго блока деленияг На чертеже изображена функциональная схема устройства. Устройство содержит Исследуемое звено 1, интегратор 2, блок 3 масштабирования, интегратор 4, блоки 5 и 6 деления, сумматор 7, измерительный блок 8. Устройство работает следующим образом. Сигнал, снимаемый со входа исследуе мого звена 1, подается на первый входа интегратора 2, а на второй вход t с про тивоположным знаком подается сигнал с выхода исследуемого звена. С выхода интегратора 2 сигнал поступает на вход блока 3 масштабирования, который подключен к одному из входов интегратора 4 (вход с ). На второй вход d интегратора 4 с противоположным знаком подается сигнал со входа исследуемого звена 1. На вход делимого бйока 5 деления юступает сигнал с выхода интегратора 2, а на аналоговый вход блока 6 делени ригнал с выхода интегратора 4. Сигнал, рнимаемый с выхода блока 3 масштабирования, подается на входы делителя блоков 5 и б деления. Выходные сигналы блоков 5 к 6 деления поступают на входы сумматора 7. При этом выходной сиг нал сумматора 7 соответствует величине а сигнал на выходе интегратора 4 величине Т(. Измерительный блок 8 регистрирует выходные сигналы блоков 4 и 7 соответственно. Процесс измерения состоит из двух операций: установка коэффициентов передачи интеграторов 2 и 4 и коэффициента усиления блока 3 масштабирования, а также непосредственно измерения параметров. Установка коэффициентов осуществляется следующим образом. В установившемся режиме, изменяя коэффициент передачи интегратора по входу а , добиваются максимального напряжения на выходе интегратора 2 (в режиме установки коэффициентов .интегра торы 2 и 4 первоначально работают в масштабном режиме). Затем, изменяя коэффициент передачи интегратора 2 по входу b t устанавливают нулевой уровень сигнала на выходе интегратора 2, после чего, переведя интегратор 2 в режим ит-егрирования и возвратив схему в исходное состояние, необходимо подать на вход исследуемого звена 1 скачкообразный сигнал и в установившемся режиме, изменяя коэффициент передачи интегратора 4 по входу d , добиваются максимального сигнала на выходе блока 4. Затем, изменяя коэффициент усиления блока 3 масштабирования, устанавливают нулевой уровень сигнала на выходе интегратора 4. После этих операций устройство откалибровано и, переведя интегратор 4 в режим интегрирования, можно приступать к определению параметров исследуемого звена. Для этого необходимо, подавая ска шообразный сигнал на вход звена 1, с помощью измерительного блока 8 производить определение величин Т и ТпОписанное устройство дает возможность измерять параме1ры не только инерционных звеньев первого порядка, но и параметры интегродифференцирующих звеньев. Формула изобр е т е н и я Устройство для измерения параметровдинамических звеньев систем регулирования, содержащее измерительный блок и первый интегратор, входы которого соединены с входом и выходом исследуе мого динамического звена, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит блок масштабирования, два блока деления, сумматор и второй интегратор, один вход которого подключен к входу исследуемого динамического звена, второй вход к выходу блока масштабирования и к первым входам блоков деления, выходы которых связаны с соответствующими входами сумматора, выход которого соединен с одним входом измерительного блока, другой вход которого подключен к выходу первого блока деления, второй вход которого связан с выходом второго интегратора, а выход первого интегратора подключен к входам блока масштабирования и второго блока деления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 467332, кл. G,05 В 23/02, 1974. 2.Борцов Ю. А., Суворов Г. В., Шестаков Ю. С. Экспериментальное определение параметров автоматизированных электроприводов. Л., Энергия, 1969, с, 13 (прототип).
LF
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1980 |
|
SU949637A2 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1981 |
|
SU1016773A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
| Устройство для измерения параметров инерционных звеньев систем автоматического регулирования | 1980 |
|
SU877478A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2133975C1 |
1
