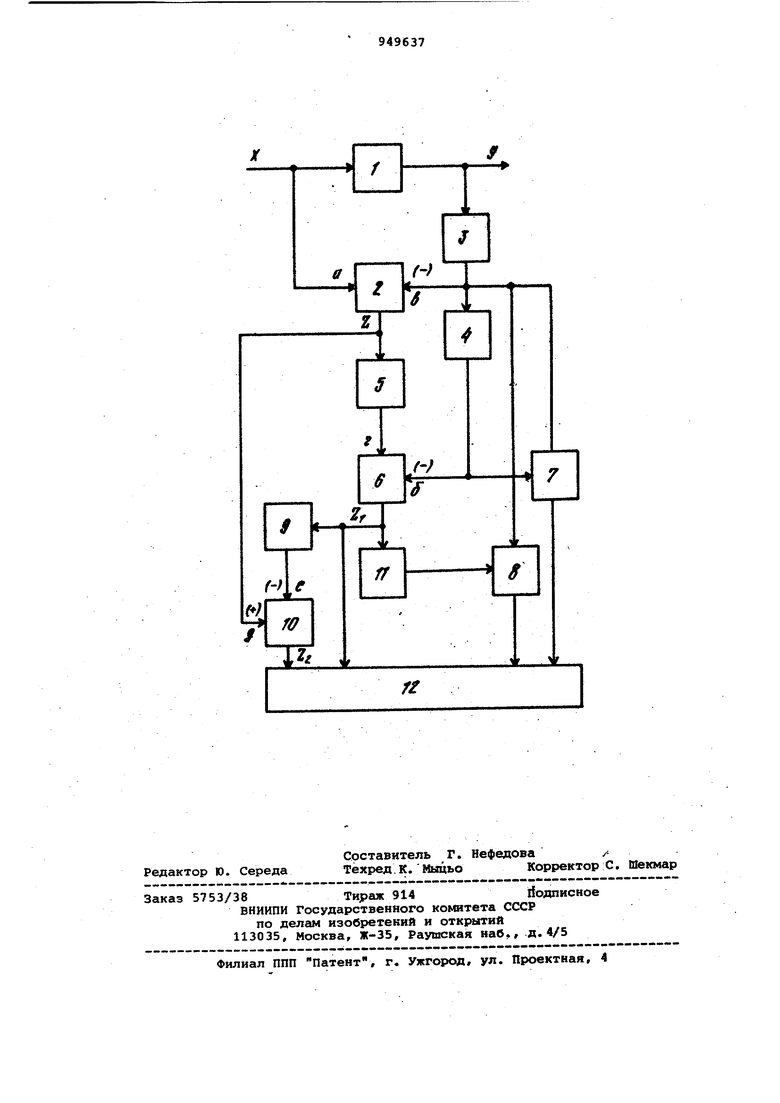
Изобретение относится к области автоматического регулирования. По основнс 4у авт.св. W 622058 известно устрюйство, содержащее первый интегратор с сумматором, первый вход которого соединен с первым входо устройства, измерительный блок, два блока масштабирования, второй интегра тор с сумматором и два блока деления напряжения, первые входы которых соединены с выходом первого и входом второго блоков масштабирования и вторым входом первого сумматора, выход первого интегратора подключен к первому входу второго сумматора, ко второму входу которого подключены выход второго блока масштабирования и второ вход первого блока деления напряжения, выход второго интегратора связан со вторым входом второго блока деления напряжения, выходы блоков деления напряжения соединены с соответствующими входс1ми измерительного блока, а вход первого блока масштабирования связан со вторым входом устройства И Недостаток известного устройства заключается в том, что оно не позволяет определить первую и вторую произ водную от выходного сигнала объекта. Цель изобретения - расширение функциональных возможностей устройства. Указанная цель достигается тем, что в устройство дополнительно введен третий блок масштабирования, подкл :- . ченный своим входом к выходу второго сумматора, а выходом - к первому входу третьего сумматора, второй вход которого подключен к выходу первого сумматора, причем выходы второго и третьего сумматоров подключены к соответствукяцим входам измеритель.ного блока. На чертеже изображена функциональная схема предлагаемого устройства. Устройство содержит инерционное звено 1, первый сумматор 2 первый и второй блоки 3 и 4 масштабирования, первый интегратор 5, второй сумматор б, первый и второй блоки 7 и 8 деления нгшряжения, третий блок 9 масштабирования, третий сумматор 10, второй интегратор 11 и измерительный блок 12. Уст юйство работает следукнцим образом. Сигнал, снимаемый со входа инерционного звена 1, подается на первый вход первого сумматора 2 (вход а ), а на второй вход (В) с противоположным знаком, подается сигнал с первого блока 3 масштабирования, подключенно го к выходу исследуемого инерционного эвена. Выход первого сумматора 2 подключается к первому входу (9) третьего Сумматора 10 и через первый интегратор 5 к первому входу (г) второго сумматора б. Выход первого блока 3 машстабирования через второй -блок 4 масштабирования подключается ко второму входу (Ь) интегратора 6 противоположным знаком. Сигнал, сним емый с выхода блока 3 масштабировани подается на один из двух входов каждого из блоков 7 и 8 деления (делитель). На второй вход блока .7 деления подается сигнал с выхода блока 4 мае штабирования, а на второй вход блока 8 деления через интегратор 11 - сигИал с выхода сумматора 6. При этом через -выходной сигнал блока 7 делени соответствует величине коэффициента при первой производной дифференциаль ного уравнения исследуемого звена, сигнал на выходе блока 8 величине коэффициента при второй про изводной, а сигнал на выходе суммато ра 6 - первой производной от выходного сигнала инерционного звена 1. Сиг нал с выхода сумматора б через трети масштабирующий усилитель 9 подается на второй вход третьего сумматора 10 с противоположным знаком (вычитаемое). При этом сигнал на выходе сумматора 10 соответствует величине второй производной от выходного сигнала исследуемого звена 1. Этот сигнал, а также выходные сигналы блоков 7 и 8 деления и сумматора б регистрируются измерительным блоком 12. Процесс измерения состоит из двух операций. 1.Установка коэффициентов переда чи интеграторов 5 и 11 и коэффициентов усиления блоков 3, 4 и 9 масштабирования. 2,Непосредственное измерение параметров звена. Установка коэффициентов осуществляется следующим образом. В установившемся режиме, изменяя коэффициент передачи сумматора 2 по входу а , добиваются максимальногй напряжения на выходе интегратора 5 (в режиме установки коэффициентов интегра торы 5 и 11 работают в масштабном режиме). Затем изменяя коэффициент усиления блока 3 масштабирования, устанавливают нулевой уровень сигнала на выходе интегратора 5. После чего, переведя интегратор 5 в режим интегрирования и возвращают схему в исходное состояние, необходимо подать на выход исследуемого звена 1 скачкообразный сигнал и в установившемся режиме, изменяя коэффициент передачи сумматора б по входу Ъ устанавливают максимальное напряжение на выходе интегратора 1. Затем, меняя коэффициент усиления блока 4 масштабирования, добиваются нулевого уровня сигнала на выходе интегратора 11. Коэффициент усиления третьего блока 9 масштабирования устанавливают равным отношению сигналов на выходах делителей 7 (делимое) и 8 (делитель). При этом коэффициенты передачи по входам сумматора 10 устанавливают равным единице. После этих операций предлагаемое устройство откалибровано и, переведя интегратор 11 в режим интегрирования, можно приступать к определению параметров исследуемого звена. Для этого необходимо, подавая на вход звена 1 сигнал, с помощью измерительного блока 12 цроизводить определение коэффициентов уравнений и первой и второй производных от выходной величины исследуемого звена. Формула изобретения Устройство для измерения параметров инерционных звеньев систем регулирования по авт.св. 622058, отличающееся тем, что, с целью расширения функциональных возможностей .в него введен третий блок масштабирования, подключенный своим входом к выходу второго сумматора, а выходом - к первому входу третьего сумматора, второй вход которого подключен к выходу первого сумматора, причем выходы второго и третьего сумматоров подключены к соответствующим входам измерительного блока. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 622058, кл. G 05 В 23/02, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров динамических звеньев систем регулирования | 1978 |
|
SU930267A1 |
| Устройство для измерения параметров инерционных звеньев | 1985 |
|
SU1269100A1 |
| Устройство для измерения параметров динамических звеньев систем управления | 1977 |
|
SU732823A1 |
| Устройство для определения постоянных времени нестационарных инерционных звеньев | 1974 |
|
SU551613A1 |
| Устройство для измерения параметров линейных динамических объектов | 1979 |
|
SU864251A1 |
| Устройство для измерения параметров звеньев систем регулирования | 1985 |
|
SU1264141A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2133975C1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1976 |
|
SU622058A1 |
| Устройство для измерения параметров инерционных звеньев систем регулирования | 1981 |
|
SU1016773A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2156494C1 |