(54; РАБОЧИЙ ОРГАН ЯГОДОУБОРОЧНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Встряхиватель плодов | 1979 |
|
SU782736A1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДЕЙСТВУЮЩЕЙ СИЛОЙ (ВАРИАНТЫ) И РЕГУЛИРУЕМЫЙ ВИБРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531518C1 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| Рабочий орган плодоуборочной машины | 1991 |
|
SU1800939A3 |
| Устройство для вибрационной обработки | 1987 |
|
SU1458182A1 |
| МАШИНА ДЛЯ СБОРА ЯГОД | 2001 |
|
RU2222885C2 |
| Рабочий орган ягодоуборочной машины | 1981 |
|
SU993866A1 |
| Импульсный нагружатель | 1987 |
|
SU1454516A1 |
| Встряхиватель | 1980 |
|
SU1041064A1 |
| Рабочий орган машины для снятия плодов со срезанных ветвей | 1991 |
|
SU1800937A3 |
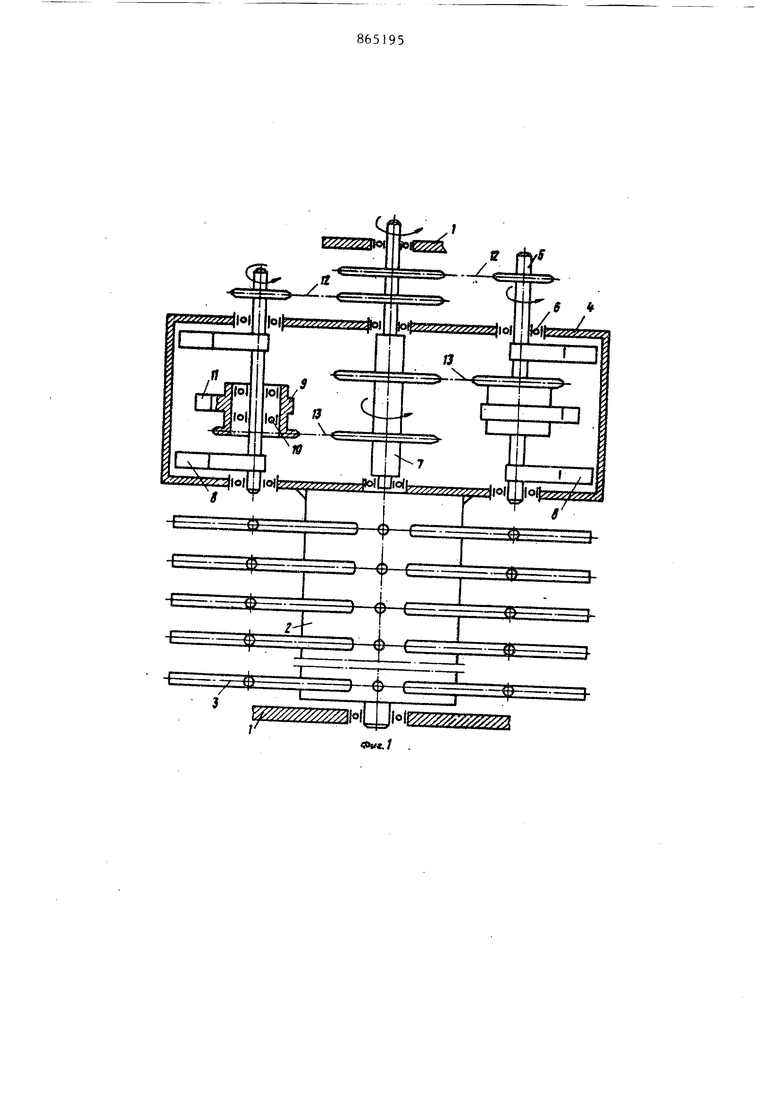
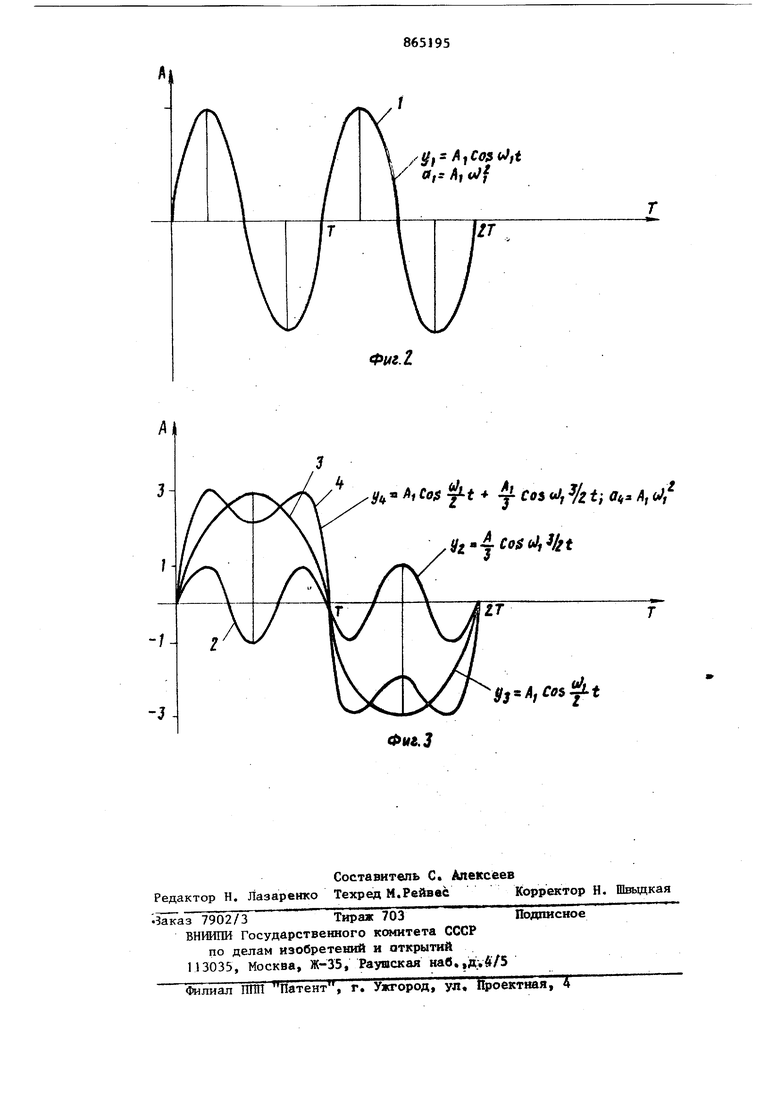
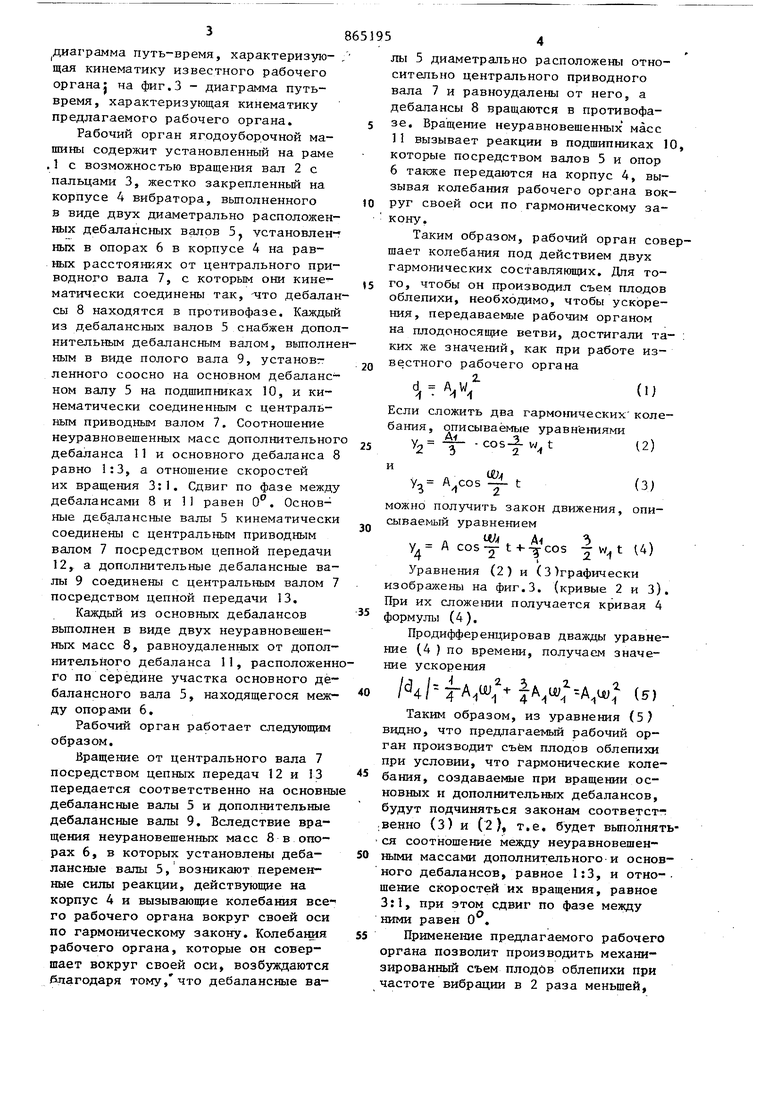
Изобретение относится к сельскохозяйственному машиностроению и предназначено для уборки ягод облепихи. Известен рабочий орган ягодоубороч ной машины, включающий вал с пальцами и механизм возбуждения механичесг ких колебаний J. Наиболее близким по технической сущности является рабочий орган ягод уборочной машины, содержащий установ ленный на раме имеющий пальцы вал, закрепленный на корпусе вибратора , который выполнен с дебалансными вала ми и размещенным между ними централь ным приводным валом 2 . Недостатком известных рабочих органов является то, что при увеличе НИИ частоты колебаний до значений, при которых происходит отрыв плодов облепихи, пальцы рабочего органа в местах контакта с плодоносящими ветв ми наносят значительные повреждения. Цель изобретения - уменьшение повреждений ветвей путем снижения частоты колебаний. Указанная цель достигается тем, что каждый из дебалансных валов снабжен дополнительным дебалансным валом, выполненным в виде пологого вала, установленного на подшипниках соосно основному дебалансному валу, и кинематически соединенным.с центральным приводным валом. Причем соотношение неуравновешенных масс дебалансов дополнительных и основных валов равно 1:3, а отношение скоростей их вращения 3:1, при этом сдвиг по фазе между ними равен 0°, Кроме того, каждый из дебала нсов основного вала выполнен в виде двух одинаковых неуравновешенных масс, равноудаленных от дебаланса дополнительного вала, который расположен по середине основного вала. Па (|eir.1 показана кинематическая схема рабочего органа; на фиг.2 диаграмма путь-время, характеризующая кинематику известного рабочего органаJ на фиг.З - диаграмма путьвремя, характеризующая кинематику предлагаемого рабочего органа. Рабочий орган ягодоуборочной машины содержит установленный на раме .1 с возможностью вращения вал 2 с пальцами 3, жестко закрепленньш на корпусе 4 вибратора, вьтолненного в виде двух диаметрально расположенных дебалансных валов 5. установлен ных в опорах 6 в корпусе 4 на равных расстояниях от центрального приводного вала 7, с которым они кинематически соединены так, -что дебалан сы 8 находятся в противофазе. Каждый из дебалансных валов 5 снабжен допол нительным дебалансным валом, ввтолне ным в виде полого вала 9, установгленного соосно на основном дебалансном валу 5 на подшипниках 10, и кинематически соединенным с центральным приводным валом 7. Соотношение неуравновешенных масс дополнительно дебаланса 11 и основного дебаланса равно 1:3, а отношение скоростей их вращения 3:1. Сдвиг по фазе между дебалансами 8 и 11 равен О . Основные дебалансные валы 5 кинематическ соединены с центральным приводным валом 7 посредством цепной передачи 12, а дополнительные дебалансные ва лы 9 соединены с центральным валом посредством цепной передачи 13. Каждый из основных дебалансов вьтолнен в виде двух неуравновипенных масс 8, равноудаленных от допол нительного дебаланса 11, расположен го по середине участка основного дё балансного вала 5, находящегося меж ду опора т 6. Рабочий орган работает следующим образом. Вращение от центрального вала 7 посредством цепных передач 12 и 13 передается соответственно на основн дебалансные валы 5 и дополнительные дебалансные валы 9. Вследствие вращения неурановешенньпс масс 8 в опорах 6, в которых установлены дебалансные валы 5, возникают переменные силы реакции, действующие на корпус 4 и вызывающие колебания все го рабочего органа вокруг своей оси по гармоническому закону. Колебатя рабочего органа, которые он совершает вокруг своей оси, возбуждаются благодаря тому,что дебалансяые ва4лы 5 диаметрально расположены относительно центрального приводного вала 7 и равноудалены от него, а дебапансы 8 вращаются в противофазе. Вращение неуравновешенных масс 11 вызывает реакции в подшипниках 10, которые посредством валов 5 и опор 6 также передаются на корпус 4, вызывая колебания рабочего органа вок- руг своей оси по гармоническому закону. Таким образом, рабочий орган совершает колебания под действием двух гармонических составляющих. Для тоГО, чтобы он производил съем плодов облепихи, необходимо, чтобы ускорения, передаваемые рабочим органом на плодоносяш е ветви, достигали таких же значений, как при работе известного рабочего органа d.TA. Если сложить два гармоническихколебания, описываемые уравнениями У2 -cos-|-w,t у можно получить закон движения, описываемый уравнением У А cos t-ь 14) Уравнения (2 ) и (З )графически изображены на фиг.З. (кривые 2 и З). При их сложении получается кривая 4 формулы (4). Продифференцировав дважды уравнение (4 ) по времени, получаем значение ускорения / 4/-гАК ,« (5 Таким образом, из уравнения (5) видно, что предлагаемый рабочий орган производит съём плодов облепихи при условии, что гармонические колебания, создаваемые при вращении основных и дополнительных дебалансов, будут подчиняться законам соответстг венно (З) и (2) т.е. будет выполняться соотношение между неуравновешенными массами дополнительного и основного дебалансов, равное 1:3, и отно- щение скоростей их вращения, равное 3:1, при этом сдвиг по фазе между ними равен О . Применение предлагаемого рабочего органа позволит производить механизированный съем плодив облепихи при частоте вибрации в 2 раза меньшей,
чем в иавестном рабочем органе, что видно при сравнении кривой 4 (фиг.З) и кривой 1 (фиг. 2), так как еоти одно полное колебание известного рабочего органа происходит за период Т, то одно полное колебание предлагаемого рабочего происходит .аа период 2 Т.
Уменьшение частоты колебаний рабочего органа, в свою очередь, сиизит общее количество взаимодействий пальцев рабочего органа с плодоую- сящими ветвями за период времени, необходимый для съема плодов облепихи,, что позволит уменьшить повреждеНИН плодоносящих ветвей куста при вибрационной уборке.
Формула изобретения
частоты колебаний, каждый из дебалансных валов снабжен додолкительным дебалансным валом, который вьтолнен в виде полого вала, установленного на подшипниках соосно основному дебалансному валу, и кинематически соединен с центральным приводным валом.
Источники информации, принятые во внимание при экспертизе
1,Патент США № 3184908, кл,56330, 1.965.
2,Патент Великобритании № 139049 кл. А 1 F 5, 1965 (прототип).
